Clear Sky Science · en
Multi-stage Kalman filtering system for sensor fusion integrated with MoS2 memtransistor featuring 1024 conductance levels
Smarter Sensing for Safer Self-Driving Cars
Modern self-driving cars rely on a swarm of sensors to understand the road, but blending all that information quickly and efficiently is remarkably hard. This study shows how a new kind of tiny electronic device, called a memtransistor, can speed up and simplify that blending process, known as sensor fusion. By moving key calculations from bulky digital chips into lean analog hardware, the researchers dramatically cut both energy use and delay, pointing toward safer, more responsive autonomous systems that can cope with bad weather, blocked views, and crowded streets.
Why Many Eyes Are Better Than One
On today’s test tracks and highways, autonomous vehicles look out at the world using a mix of cameras, laser ranging (LiDAR), millimeter-wave radar, and motion sensors that track how the car is moving. Each of these has its own strengths and weaknesses: LiDAR can be blocked by trucks or buildings, radar struggles with fine details, and motion sensors slowly drift away from the truth if used alone. To get a trustworthy picture of surrounding traffic, the vehicle must merge these imperfect views into one consistent estimate of where things are and how they are moving. A mathematical tool called the Kalman filter has become a workhorse for doing this in real time, but in conventional form it runs on digital processors that burn power and introduce delays as they repeatedly shuttle data between analog sensors and digital logic.

A New Kind of Electronic Building Block
The team tackles this problem using a device built from a single atomic layer of the semiconductor molybdenum disulfide (MoS2). Their memtransistor combines the roles of a memory element and a transistor in one three-terminal structure, whose electrical conductance can be smoothly tuned and then remembered even when power is removed. By carefully controlling tiny vacancies in the material’s atomic lattice with electric fields, the device can reliably hold 1024 distinct conductance levels across a wide range, and keep them for more than a year. Just as important, these levels change in a nearly straight-line fashion as the control voltage is swept, which makes it possible to map a desired mathematical weight in the Kalman filter directly onto a physical setting of the memtransistor.
Turning Math into Hardware
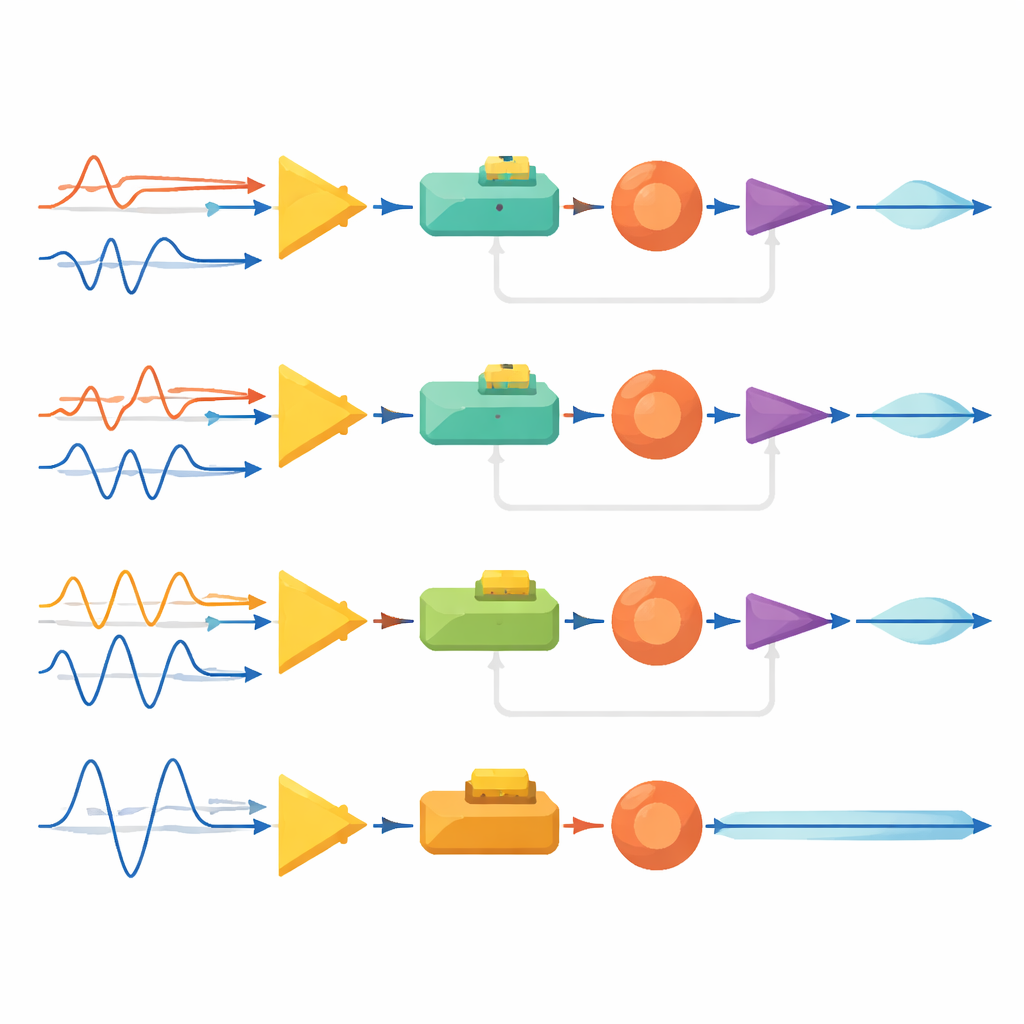
Building on this device, the researchers design an analog version of a multi-stage Kalman filter that operates directly on sensor voltages instead of on digital numbers. The circuit consists of three chained stages that estimate a vehicle’s position, velocity, and acceleration. Within each stage, basic operations such as subtraction, integration, addition, and differentiation are carried out by compact analog modules. The crucial “gain” factor that tells the filter how much to trust new sensor readings versus its own predictions is implemented using the memtransistor’s conductance. By simply adjusting a gate voltage, the system can smoothly change how strongly it listens to LiDAR, radar, or motion sensors, without rewriting any software.
Driving Scenarios and Tough Conditions
To show how this works in practice, the team implements the full three-stage filter on a circuit board populated with their MoS2 devices and standard analog components. They feed in realistic, noisy signals that mimic what LiDAR, radar, and motion sensors would see during a lane-change overtaking maneuver on a highway. As the signals flow through each stage, the outputs become cleaner, yielding consistent estimates of position, speed, and acceleration while still preserving sharp changes that matter for safety, such as sudden braking. The system is especially impressive when one sensor becomes unreliable or blocked—for example when a truck temporarily hides another vehicle from LiDAR. By lowering the gain associated with the compromised sensor in hardware, the analog filter automatically shifts its reliance to the remaining inputs and to prior motion patterns, keeping velocity and acceleration estimates smooth and physically reasonable.
Faster, Leaner Brains for Machines
Compared with a standard digital implementation of the same filtering task, the analog memtransistor-based system uses about 13 times less energy and completes its calculations about 59 times faster, while handling three key motion variables at once. Since the devices are compact, stable, and compatible with large-scale fabrication, this approach hints at future “in-sensor” or “near-sensor” processing blocks that can be placed close to cameras and radars inside cars, drones, and other connected machines. For non-specialists, the takeaway is that by letting the physics of advanced materials do part of the math, engineers can build smarter, quicker, and more efficient electronic “brains” that help autonomous systems navigate reliably even when the view of the world is far from perfect.
Citation: Tan, T., Guo, H., Wang, S. et al. Multi-stage Kalman filtering system for sensor fusion integrated with MoS2 memtransistor featuring 1024 conductance levels. npj 2D Mater Appl 10, 31 (2026). https://doi.org/10.1038/s41699-026-00672-7
Keywords: autonomous driving, sensor fusion, Kalman filter, memtransistor, analog computing