Clear Sky Science · en
InFoRM: a unified inverse and forward model for sensorimotor control
How the brain might simplify movement
Every time you reach for a cup or tap a keyboard, your brain must transform an intention (",move my hand there") into precise muscle activity while also predicting what that movement will feel like. Classic theories assume the brain uses two separate internal calculators for this job: one to generate the commands to the muscles and another to predict the incoming sensations. This study explores a bold alternative: that a single, unified circuit could handle both sides of the problem—saving energy and improving performance.
Two ways to think about control
Traditional models of movement control imagine a split system. An "inverse" part converts a desired outcome (for example, the fingertip’s path through space) into the necessary muscle activations, while a "forward" part predicts how the body will move and what sensory feedback will result. These two pieces are often drawn as distinct boxes in textbooks. Yet brain imaging and lesion data do not clearly support such a tidy separation, and some brain regions seem to be involved in both roles. Moreover, keeping two complex circuits running may be metabolically costly. The authors therefore ask whether one flexible network could learn to produce motor commands, predict sensory feedback, and even infer the original goal from the internal signals alone.
A single network that does it all
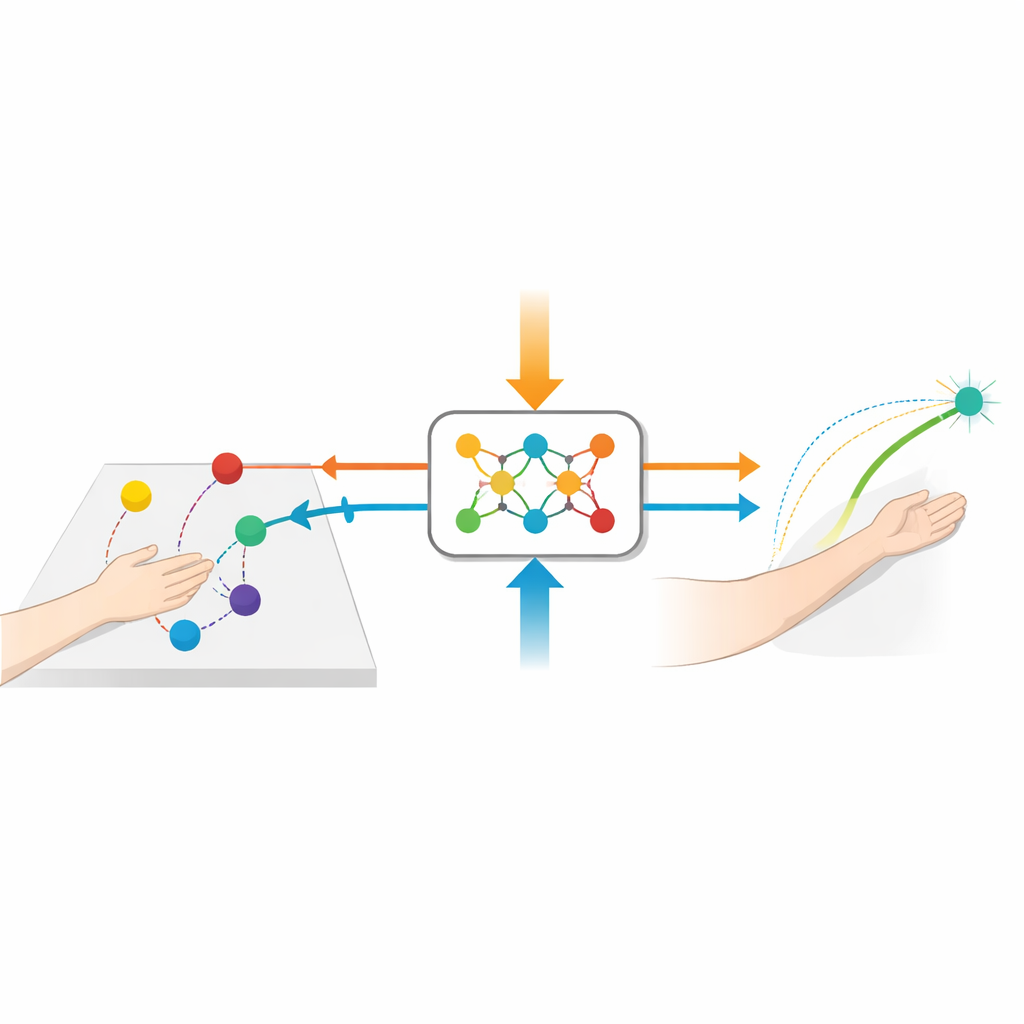
To test this idea, the researchers built a computational model called InFoRM (short for inverse–forward–recognition model). Instead of two stacked modules, InFoRM uses a single recurrent neural network—a web of interconnected units—into which goal, muscle, and sensory signals all flow. From this common "reservoir" of activity, three readouts are trained in parallel: one reconstructs the desired hand trajectory, one generates the muscle activations needed to achieve it, and one predicts the sensory signals (muscle length and speed) that would follow. Crucially, the same internal dynamics support all three tasks at once, so the model can share information across them rather than learning each in isolation.
Putting the model to a real-world test
The team recorded real arm movements from volunteers who rhythmically reached from a central spot to targets laid out in different directions and distances on a tabletop. Motion-capture data and a detailed musculoskeletal model provided, for each movement, the fingertip path, the estimated muscle activations, and the corresponding sensory-like signals from the muscles. InFoRM was trained on a subset of directions and then tested on several challenging scenarios: repeating learned movements, producing movements in new intermediate directions ("morphing" between what it had seen), and handling natural, self-chosen transitions between targets. For comparison, the authors also built more classical control architectures with separate inverse and forward networks, plus enhanced variants that were given extra input information.

Sharper predictions with fewer resources
Across all tests, the unified InFoRM network reproduced the recorded movements and muscle signals more accurately than any of the separated architectures. Its outputs followed the true signals more closely and with smaller errors, even when asked to interpolate to untrained directions or cope with realistic, unscripted target sequences. Importantly, InFoRM reached this higher accuracy while using comparable or fewer neurons and needing far fewer training iterations, hinting at better computational efficiency. The fact that it also outperformed the best augmented control model—one that had access to the same combination of goal, motor, and sensory information—suggests that the advantage comes from integrating everything in one recurrent circuit, not just from having richer inputs.
What this means for understanding the brain
The findings support the idea that the brain might not maintain sharply separated "forward" and "inverse" engines for movement. Instead, a single, richly connected circuit could implicitly contain both, with motor commands and predictions emerging from the same underlying dynamics. This perspective meshes well with modern views of the brain as a predictive machine, constantly generating and updating expectations about its own body and the world. While the model is still a simplified abstraction and biological details like nerve delays and changing synapses remain to be explored, InFoRM shows that a unified design can be both powerful and economical, offering a compelling alternative blueprint for how our nervous system might control movement.
Citation: de Graaf, M.L., Kloock, L., Schwarze, A. et al. InFoRM: a unified inverse and forward model for sensorimotor control. Sci Rep 16, 8490 (2026). https://doi.org/10.1038/s41598-026-39944-z
Keywords: sensorimotor control, internal models, neural networks, motor learning, predictive processing