Clear Sky Science · en
Sequential model predictive direct speed control of PMSM
Smarter control for everyday electric motors
Electric motors quietly power factory lines, pumps, robots and even some household appliances. Making these motors run efficiently and smoothly saves energy, cuts noise and wear, and improves reliability. This paper explores a new way to control a popular type of motor so that it reacts quickly to changes without becoming unstable or producing excessive electrical “noise.” The authors focus on a strategy that promises simpler tuning for engineers while still delivering fast and accurate speed control.
Why today’s motor controls are hard to tune
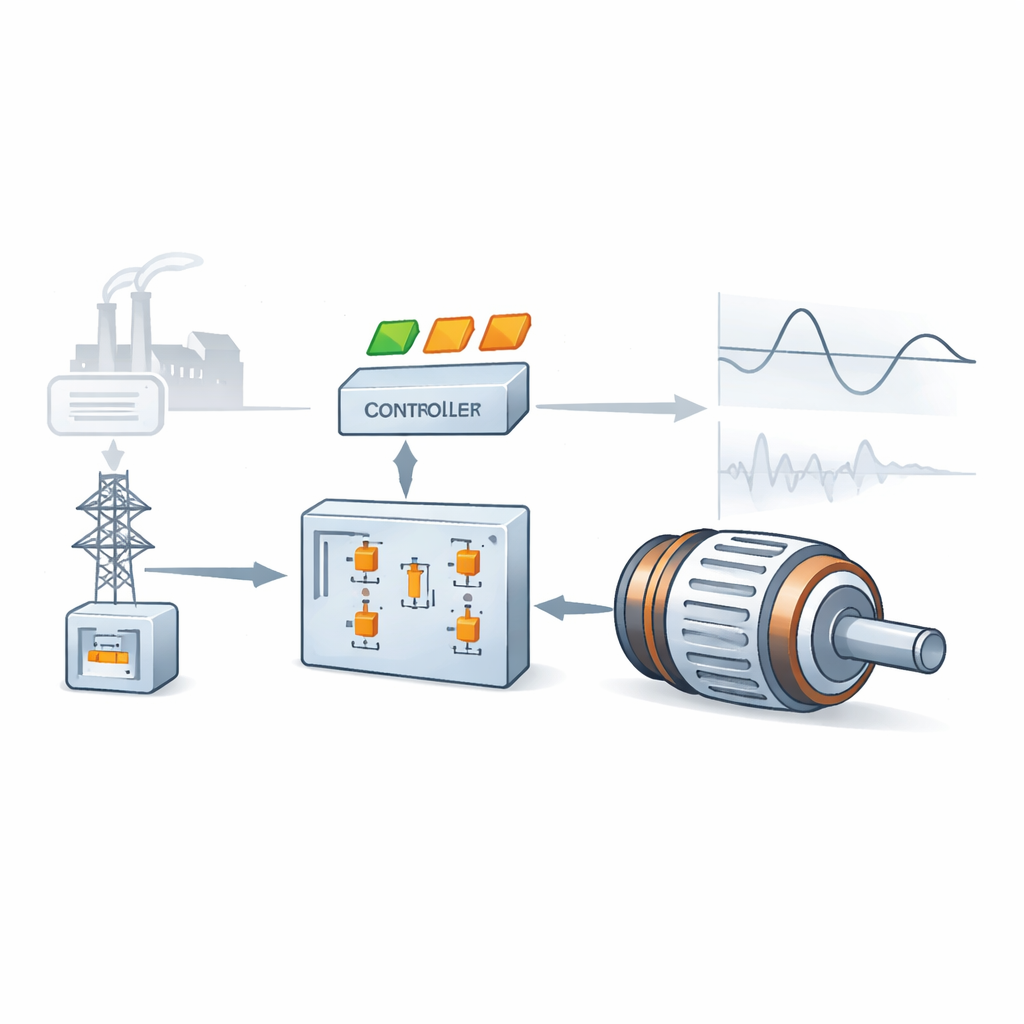
Permanent magnet synchronous motors are widely used because they are compact, efficient and capable of precise speed control. Traditional control schemes rely on several nested loops and a stack of tuning knobs that engineers must adjust by trial and error. Newer approaches based on predictive control try to choose the best action for the motor a fraction of a second into the future, improving reaction time and allowing multiple goals (such as accurate speed and low current draw) to be handled at once. However, these predictive controllers typically combine all goals into one large mathematical expression that depends on several “weighting factors.” Picking these weights is notoriously difficult: a good choice can yield excellent performance, while a bad one can make the system sluggish or even unstable.
A step‑by‑step way to make decisions
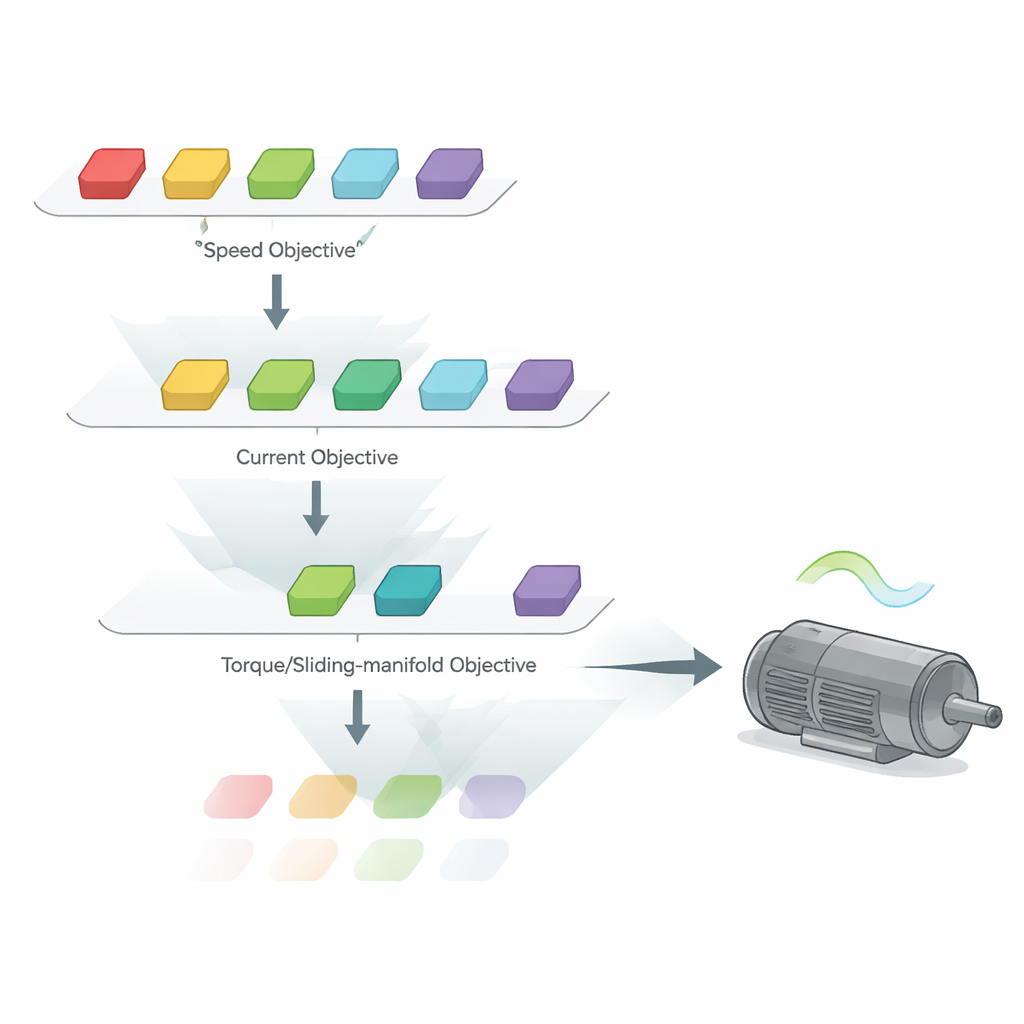
Instead of packing all goals into one complicated formula, the authors study a “sequential” approach. Here, the controller still predicts how the motor will behave for each possible switch position in the power electronics, but it evaluates separate, simpler goals one after another. First, it eliminates the switch options that would give poor speed behavior. Then, among the remaining options, it keeps only those that make efficient use of current. Finally, it selects the option that best shapes the motor torque, using a special sliding rule that links speed error and torque error so the motor speed converges more quickly. Because each step focuses on a single goal, there is no need to juggle several weighting factors; instead, the controller uses a logical elimination process. A companion observer estimates the unknown load torque on the shaft so the predictions stay accurate even when the motor is disturbed.
Improving stability with an enhanced design
When the authors first tested this sequential method, they found that, although it responded quickly to speed changes, it could become unstable and produced large ripples in the motor current, especially when they tried to push it to react faster. To correct this, they proposed an enhanced version that adds a clever twist to the first decision step: it not only looks at the predicted speed but also gently penalizes certain current components, and it scales this penalty with the requested speed. At low speeds, the controller focuses more on keeping currents calm; at higher speeds, it allows stronger action to maintain performance. This change makes it possible to use a more aggressive sliding rule for torque without triggering instability. In detailed computer simulations, the enhanced method matched the rise time of a well‑tuned conventional predictive controller and produced similar levels of electrical distortion, all with fewer tuning parameters.
Putting the method to the test in the lab
The team then implemented both the original and enhanced sequential controllers on a real 1.1‑kilowatt motor drive using a rapid‑prototyping platform. They compared them with a standard predictive controller under realistic conditions, including rapid speed ramps, sudden load application and even speed reversals. The original sequential controller could regulate speed but showed occasional loss of stability and strong current ripples, particularly at higher speeds. In contrast, the enhanced version ran stably across the tested range. By adjusting a single key parameter that shapes the sliding rule, the researchers could trade off between tighter speed tracking and smoother current waveforms. Intermediate settings provided a practical balance: speed errors were significantly reduced compared with conservative settings, while the increase in current distortion remained acceptable.
What this means for real‑world drives
For non‑specialists, the main message is that the authors have demonstrated a simpler yet still powerful way to control high‑performance electric motors. Their enhanced sequential strategy removes much of the guesswork involved in tuning traditional predictive controllers, while preserving quick reactions to speed changes and disturbances. The method is not perfect—current waveforms are still somewhat noisier than ideal, especially for very demanding settings—but it represents an important step toward more robust, easy‑to‑commission motor drives. Future work will focus on reducing these current distortions and further analyzing stability, with the goal of making this kind of smart, sequential control suitable for larger, more tightly regulated industrial systems.
Citation: Pancurák, L., Horváth, K. & Kyslan, K. Sequential model predictive direct speed control of PMSM. Sci Rep 16, 8226 (2026). https://doi.org/10.1038/s41598-026-39256-2
Keywords: permanent magnet synchronous motor, model predictive control, motor speed control, sequential control, power electronics drives