Clear Sky Science · en
Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering
Why cleaning up digital traffic really matters
Every time a traffic camera watches cars move through an intersection, it creates a hidden stream of data describing where each vehicle goes, how fast it moves, and how it accelerates or brakes. This information is gold for safer roads, smarter traffic lights, and future self-driving cars. But in reality that data is messy: cars get hidden behind trucks, headlights flare in the rain, and computer vision systems make mistakes. This study tackles a very practical question: how can we turn that flawed video data into a trustworthy record of how vehicles actually move?
When cameras misread how cars move
Video-based tracking is attractive because it is cheap, non-intrusive, and covers large areas. Yet the raw output is riddled with two main problems. The first is obvious errors, such as a car that seems to jump backward, stop instantaneously from highway speed, or show impossible bursts of acceleration. These usually come from occlusion, motion blur, or the tracking software briefly losing the vehicle. The second problem is random jitter—small, rapid wiggles in the reported position. When speeds and accelerations are calculated from those positions, the wiggles become exaggerated, making normal driving look erratic. If left uncorrected, these issues can distort traffic models by more than 40 percent, which in turn can mislead safety studies and automated driving systems.
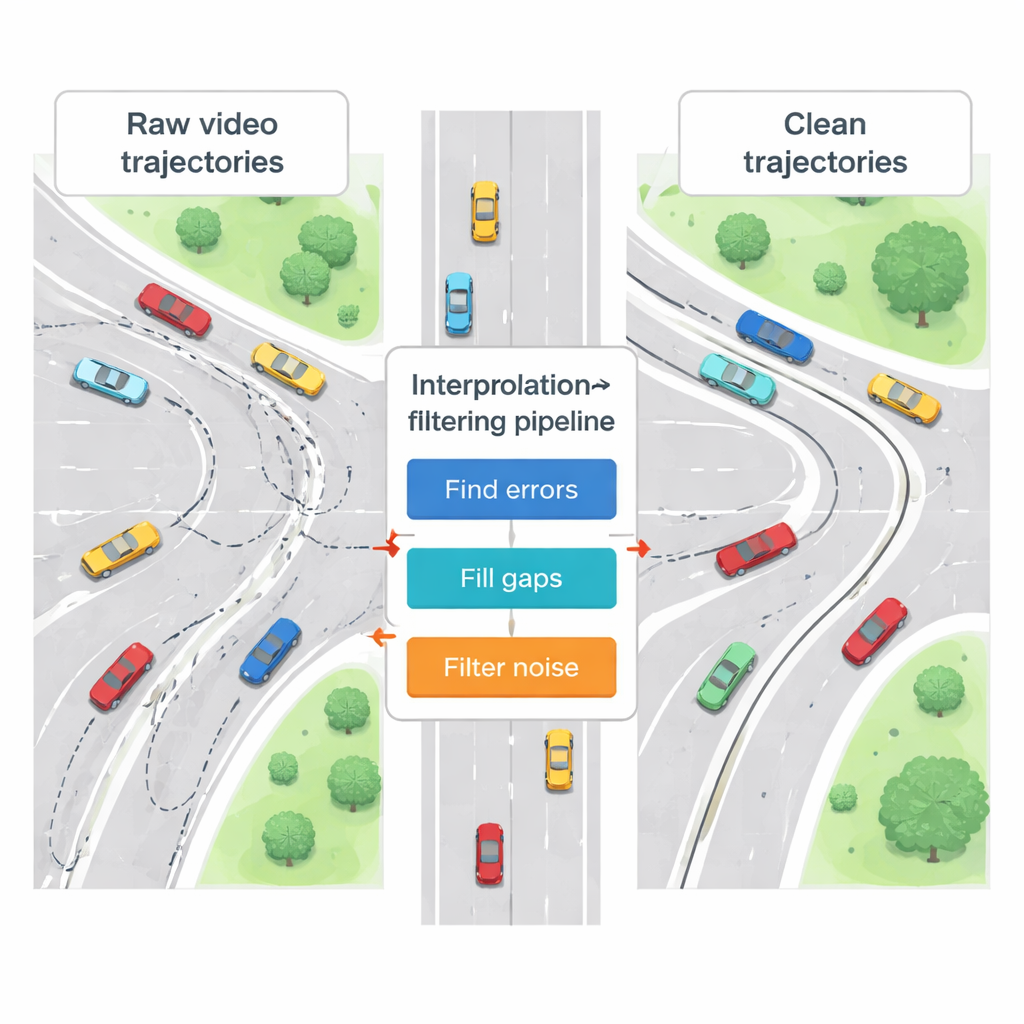
A two-step cleanup plan
To repair this damage, the authors propose a two-step reconstruction strategy that works like a careful digital mechanic. Step one focuses on obvious mistakes: it scans each vehicle’s record for speeds and accelerations that break simple physical limits, such as extremely high jerk (very sudden changes in acceleration) or acceleration beyond what a real car and driver can tolerate. Once these outlier points are found, they are replaced using mathematical tools called interpolation, which estimate missing values from nearby, more reliable points. The study compares several interpolation flavors and finds that an approach called Hermite interpolation better preserves the natural shape of the trajectory than a more traditional Lagrange method, especially when the motion is complex.
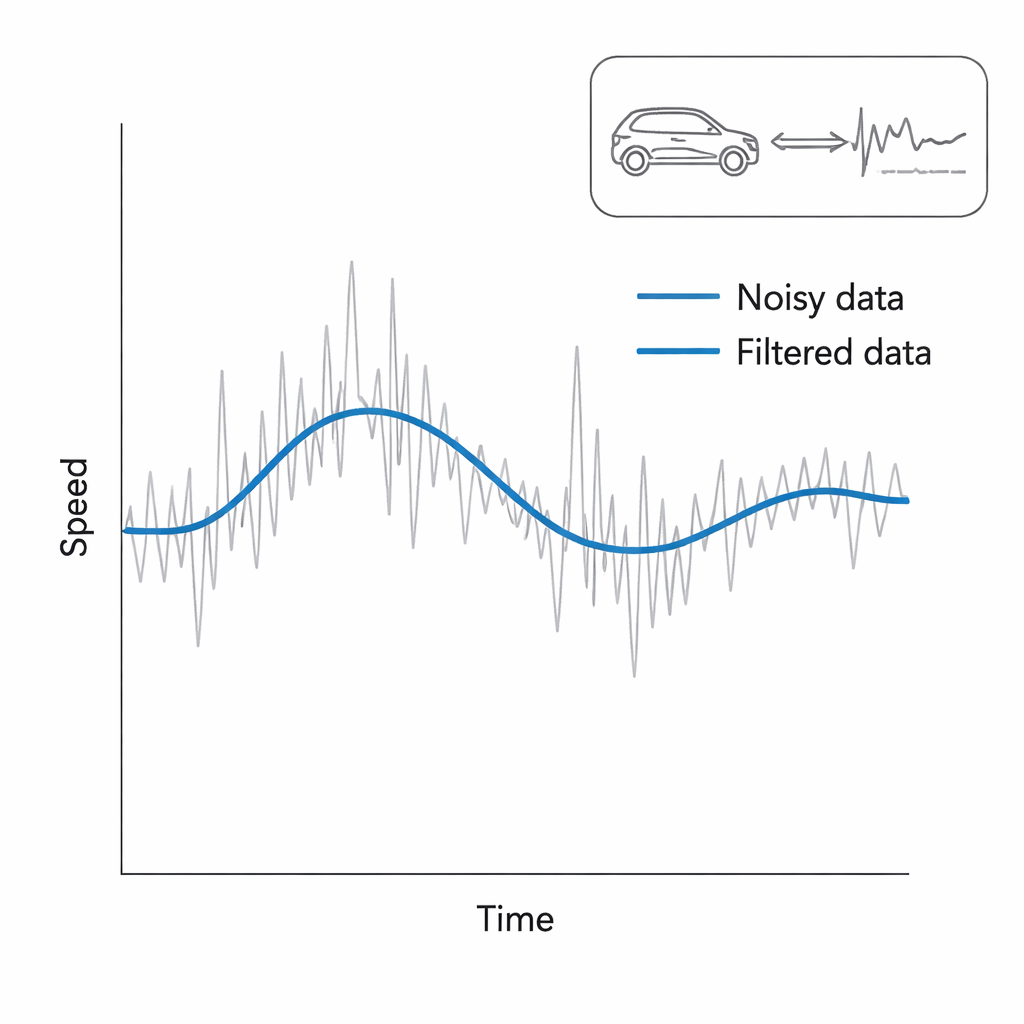
Smoothing the digital ride
Step two addresses the subtler problem of noise. Even after gross errors are fixed, the remaining traces can still look slightly shaky. Here the researchers test two ways of smoothing the data: a refined moving average method that gives more weight to recent points, and a statistical technique known as the Kalman filter, which continually updates its best guess of a car’s true position and speed as new measurements arrive. Both techniques quiet the jitter, but the Kalman filter does a better job of following real changes in driving—for example, a gentle brake or a lane change—without blurring them away. The result is a smoother, more realistic description of how each vehicle actually behaved over time.
Putting the method to the test
The team applies their framework to real video captured at a busy urban intersection in Zhengzhou, China, using modern object-detection and tracking software to extract vehicle paths. They then run dozens of different vehicle traces through their two-step process and judge success using simple physical yardsticks: how wildly the acceleration fluctuates, and how often jerk exceeds a level considered unrealistic for passenger cars. They also compare the cleaned-up video-based trajectories to ground-truth data recorded directly from a car’s dashboard instruments. Across many driving patterns—steady cruising, hard braking, lane changes—the combined interpolation-and-filtering strategy reduces acceleration variability by about 85 percent and nearly eliminates implausible jerk spikes, while matching the instrument-based records more closely than several competing methods.
What this means for everyday travel
In plain terms, this article shows how to turn imperfect footage from ordinary traffic cameras into data that engineers and automated vehicles can actually trust. By first repairing obvious glitches and then carefully smoothing away noise, the proposed method produces realistic digital traces of how cars move, without demanding exotic hardware or heavy computing power. That cleaner picture can feed into better traffic light timing, more accurate simulations of congestion, and safer self-driving algorithms that depend on understanding real-world driving behavior. While the study focuses on one city and does not yet cover every weather or road condition, it lays a clear and practical path toward using existing video networks as reliable sensors for the next generation of intelligent transportation systems.
Citation: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
Keywords: vehicle trajectory, traffic video data, data denoising, intelligent transportation, autonomous driving