Clear Sky Science · en
ESO based adaptive neural network control for a quadrotor against wind and payload disturbances
Keeping Drones Steady in a Messy Real World
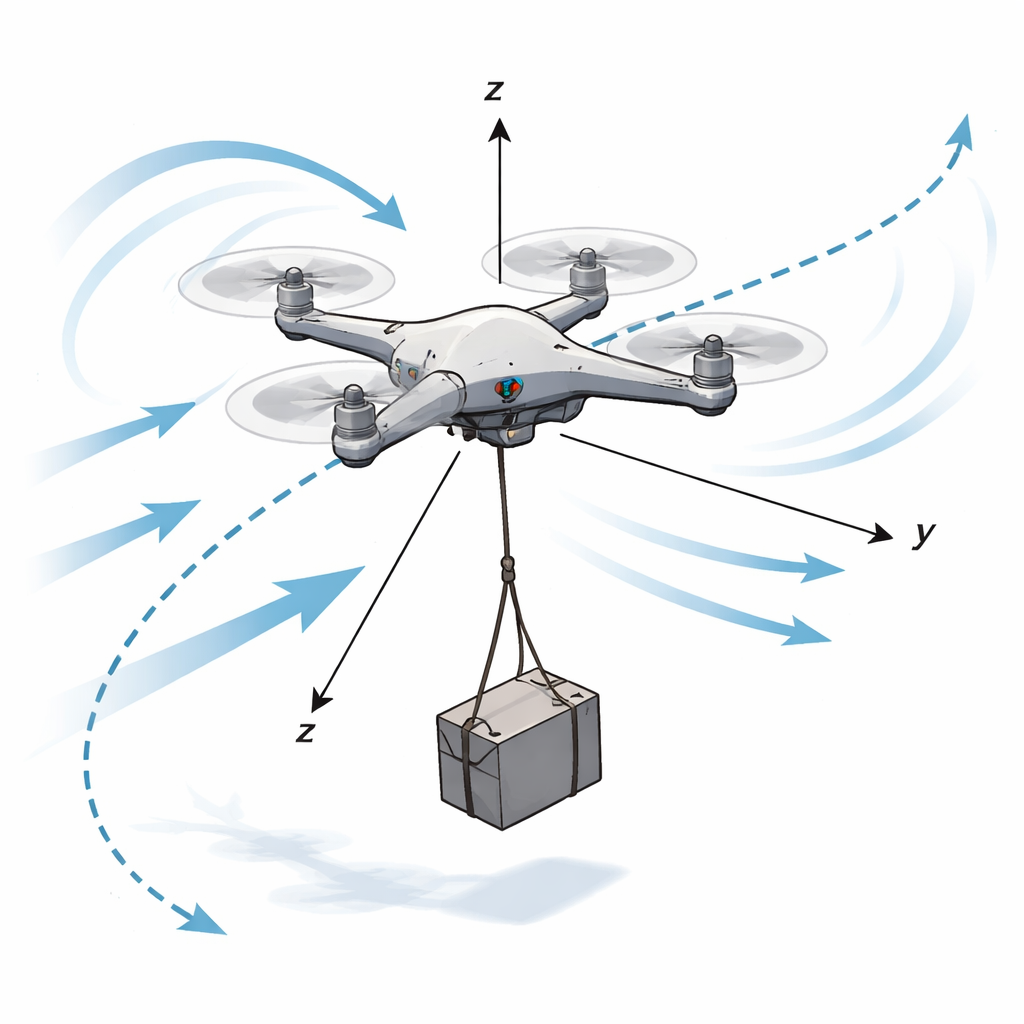
Small four-rotor drones are increasingly used for jobs like inspecting bridges, monitoring crops, or carrying small packages. But in the real world, these flying robots face gusty winds and wobbling loads hanging beneath them, both of which can easily knock them off course. This paper presents a new way to keep such drones flying smoothly along their planned paths, even when the air is rough and a swinging payload tugs them around.
Why Wind and Hanging Loads Are So Troublesome
A quadrotor drone is inherently hard to control. It is light, responds quickly to small motor changes, and its motions in different directions are tightly linked. When strong or rapidly changing winds hit the drone, they push it unpredictably. Adding a cable-suspended payload, such as a camera rig or bottle of liquid, makes things worse: the payload can swing like a pendulum, feeding extra forces back into the drone. Traditional controllers, like the widely used PID approach or more advanced sliding-mode and backstepping schemes, work well only when engineers know the drone’s physics very accurately and when disturbances are modest. If the mathematical model is off, or if the wind and payload forces change in complicated ways, these methods can produce sluggish responses, overshoot, or visible wobbling in flight.
A Smart Watchdog for Hidden Disturbances
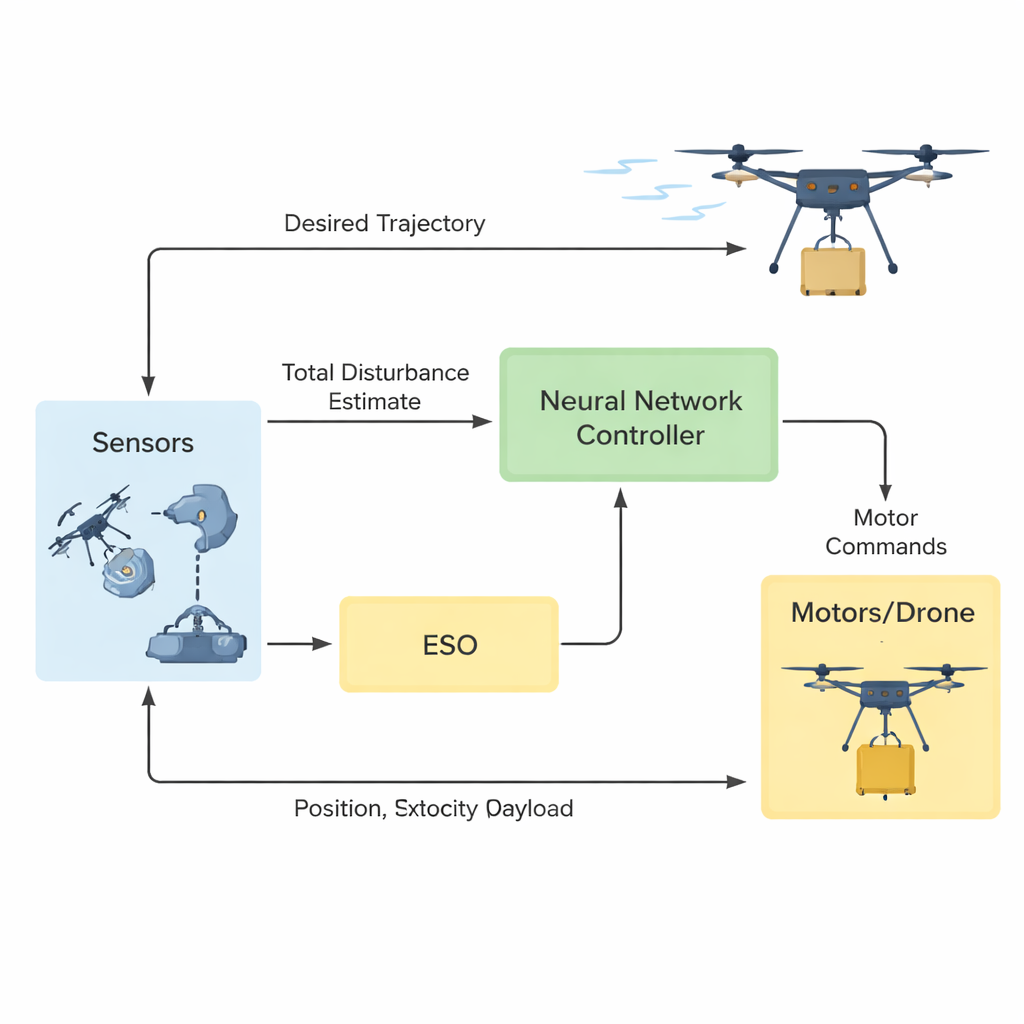
To tackle this, the authors build on a concept called active disturbance rejection. Instead of trying to model every detail of the wind and swinging payload, they treat all unknown influences together as a single “lumped” disturbance. A specially designed extended state observer acts like a mathematical watchdog, constantly inferring this total disturbance from the drone’s motion. Notably, their observer is tuned with only one main parameter, which greatly simplifies setup compared to many existing designs. The theory shows that, with proper tuning, the observer’s estimate of the disturbance converges quickly and remains tightly bounded, meaning it can be relied upon as a real-time feedforward correction rather than just a rough guess.
Letting a Neural Network Learn the Hard Parts
Even with good disturbance estimates, the controller still needs to know how the drone’s motors translate commands into actual motion—a relationship that depends on mass, geometry, and other physical details that may change over time. Instead of relying on a painstakingly identified model, the authors introduce a radial basis function neural network that learns this relationship directly from flight signals. The controller only needs to know where the drone is, where it should go, and the second derivative of the desired path (how quickly the target point accelerates). An adaptive law continuously updates the neural network’s internal weights to reduce tracking errors. Using Lyapunov-based analysis, the authors prove that under this adaptive scheme the tracking errors remain uniformly bounded and can be driven arbitrarily small, while the weight updates remain stable.
Putting the Method to the Test
The team validates their approach through both computer simulations and real-world experiments. In simulations, the drone is asked to follow challenging three-dimensional spiral paths while being hit with random wind gusts and payload forces that change over time. The new controller is compared with three other advanced methods: linear active disturbance rejection, sliding-mode control, model-free terminal sliding-mode control, and in a harder test, adaptive fractional-order control. Across multiple scenarios, the proposed method achieves smoother trajectories and smaller root-mean-square position errors, especially after disturbances are introduced. In physical tests, the researchers fly a quadrotor indoors while two industrial fans blow air at it and a 200-gram water bottle hangs beneath it. Motion capture cameras record the drone’s position. Even under continuous wind and manual tugs on the payload, the drone holds its target point within a few centimeters and its motor commands remain well behaved, suggesting the method is practical for real hardware.
What This Means for Everyday Drone Use
For non-specialists, the key takeaway is that this work offers a way to make drones more dependable in rough conditions without requiring perfect knowledge of their internal physics. By combining a simple but powerful disturbance observer with a learning-based controller, the system can adapt on the fly to wind gusts and swinging loads, keeping the drone on course with minimal tuning effort. This kind of robust, model-light control could make it easier to deploy drones for routine tasks in cities, farms, and factories, and the same ideas may eventually extend to teams of drones and to fault-tolerant designs that keep flying safely even when some components fail.
Citation: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
Keywords: quadrotor control, drone stability, wind disturbance, neural network controller, payload tracking