Clear Sky Science · en
PCA whitening improves the illumination tolerance for visual place recognition with Fourier signatures
Robots Finding Their Way Indoors
Imagine a robot rolling through a home or office that has bright sunlight one day and dim lamps the next. To know where it is, the robot compares what its camera sees now with pictures it stored earlier. But when lighting changes dramatically, places can look almost unrecognizable. This paper explores a lean, math-based way for robots to recognize places from panoramic images, and shows how a statistical trick called PCA whitening makes this method much more tolerant to changing illumination.
Seeing the World as Waves, Not Pixels
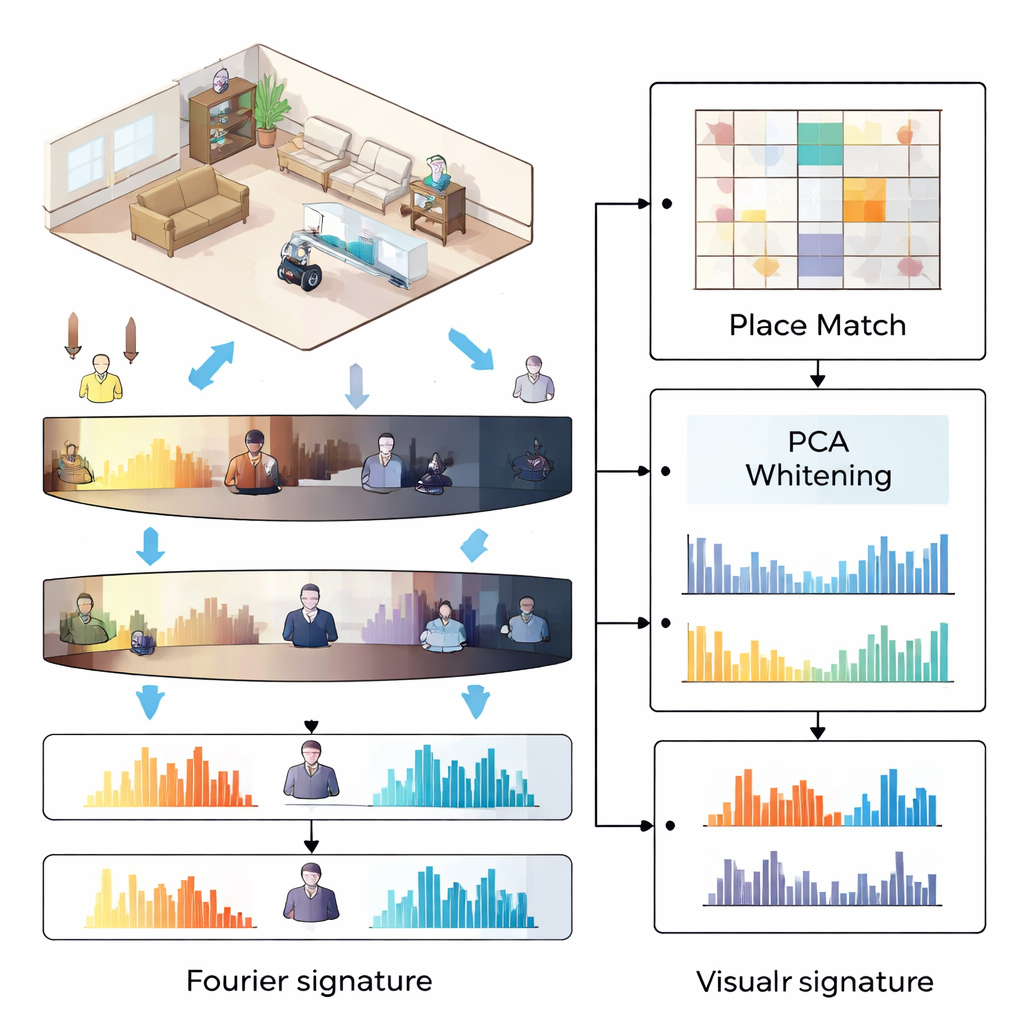
Most modern visual place recognition systems use many small details in an image—edges, corners, and textures—and then combine them into a compact “fingerprint.” By contrast, this work builds on Fourier signatures, which treat a panoramic image not as a grid of pixels but as a mixture of waves of different frequencies. The camera captures a 360-degree view; this panorama is split into horizontal bands, and each band is converted into a one-dimensional frequency spectrum. Only the strengths (amplitudes) of the lowest frequencies are kept and stacked into a descriptor. Because the method discards information about where features appear along the circle, the descriptor hardly changes when the robot simply turns around, making it naturally robust to rotation.
Why Lighting Breaks Simple Signatures
Even though Fourier signatures are compact and fast to compute, they still struggle when illumination changes strongly between recordings of the same place. Natural images tend to have much more energy in low frequencies than in high ones, and this imbalance is affected by lighting. As a result, some parts of the descriptor dominate the similarity measure, and many entries are strongly correlated with each other because neighboring rows in the panorama look alike. Without correction, the system’s decision about whether two images show the same place is driven by a small, redundant subset of values, making it fragile under different lighting conditions.
Cleaning Up the Signal with PCA Whitening
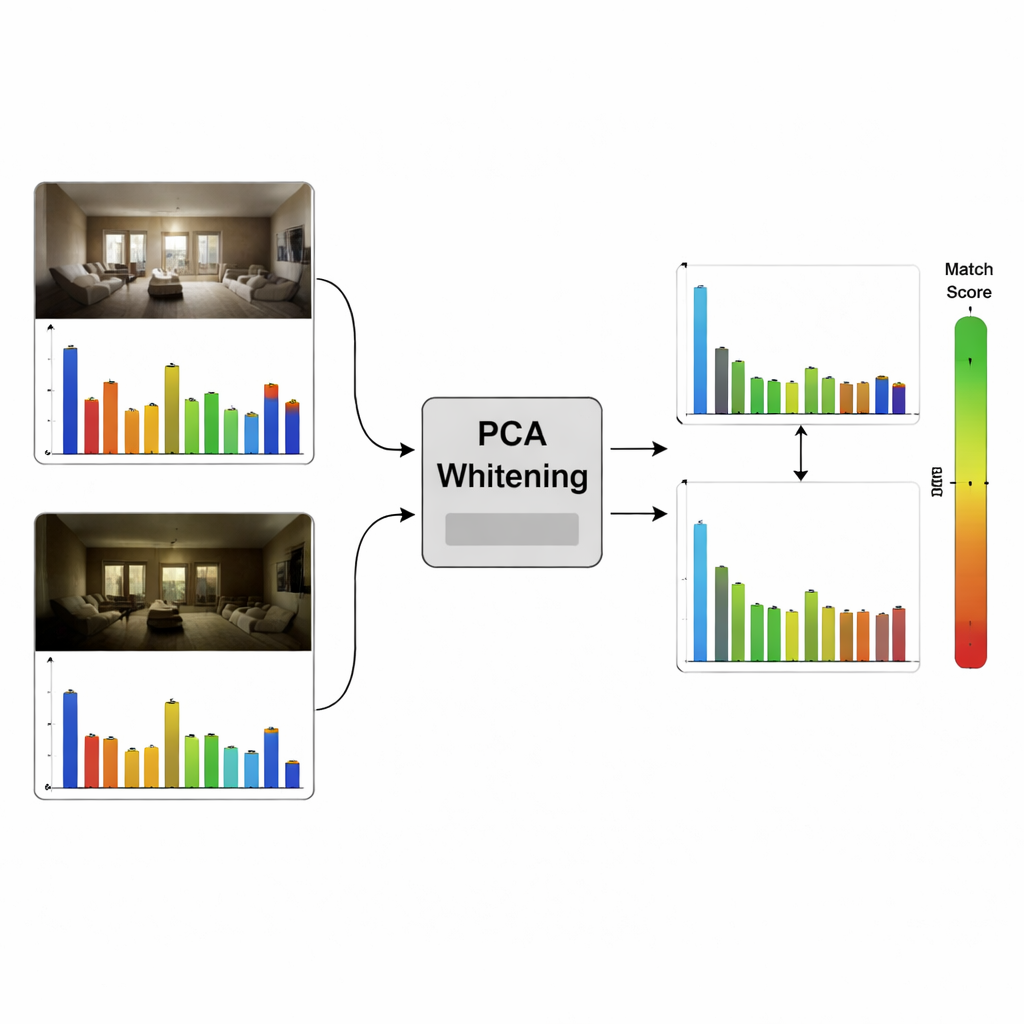
The author proposes adding PCA whitening as a post-processing step to the Fourier descriptors. Using a collection of training panoramas from seven indoor environments, the system learns how descriptor entries tend to vary and correlate. PCA whitening then recenters the descriptor, rotates it into directions of independent variation, and rescales each direction so that all have equal influence. This removes redundant correlations and balances the contribution of different frequencies. Because the transformed entries are sorted by importance, the descriptor can also be safely shortened simply by cutting off the tail. Experiments on three unseen environments with multiple lighting variants show that whitening consistently boosts the chance that the correct place appears among the top retrieved candidates, especially for the practically important case of returning only a small list of likely matches.
Lightweight but Competitive with Deep Learning
To judge how this streamlined approach stacks up against current trends, the paper compares it with AnyLoc, a recent visual place recognition method based on a very large vision transformer network. AnyLoc also uses PCA-based compression, but starts from high-dimensional features produced by deep learning. On the panoramic indoor dataset, whitened Fourier signatures match or even outperform AnyLoc when the system is allowed to propose up to about ten candidate images, which is a realistic operating point for many robots. Crucially, the Fourier-based method is far cheaper to run: it relies on fast Fourier transforms and simple matrix operations on the CPU, while AnyLoc needs a powerful GPU and much more time per image.
What This Means for Everyday Robots
For a lay reader, the core message is that clever use of classical mathematics can still rival heavyweight artificial intelligence in certain tasks. By transforming panoramic images into balanced, decorrelated descriptors, PCA whitening makes a simple frequency-based place recognition method far more resistant to changes in lighting. Robots using this approach can localize themselves reliably in homes and offices under a wide range of illumination conditions, while using modest computing resources. This makes robust visual navigation more accessible for smaller, cheaper robots that may one day share our everyday spaces.
Citation: Offermann, L. PCA whitening improves the illumination tolerance for visual place recognition with Fourier signatures. Sci Rep 16, 6148 (2026). https://doi.org/10.1038/s41598-026-38929-2
Keywords: visual place recognition, mobile robots, panoramic imaging, Fourier signatures, PCA whitening