Clear Sky Science · en
Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants
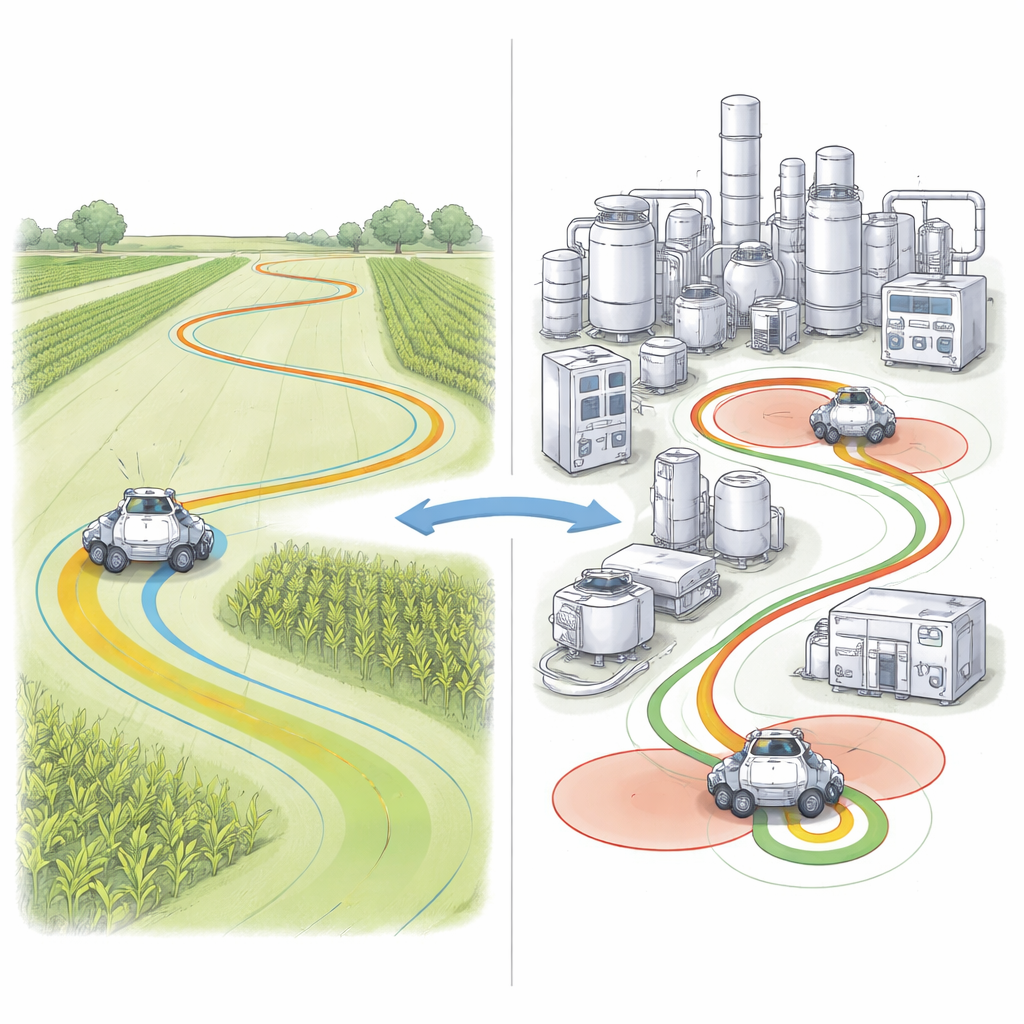
Robots that Stay on Track
As robots move out of clean factory halls and into farm fields and chemical plants, they must follow narrow paths with great precision. A small wobble might crush crops, bump into pipes, or roll into an area where flammable gases are present. This paper describes a new way for wheeled robots to steer and control their speed so they can stay close to a planned route in both wide-open spaces and cramped industrial sites.
Why Guiding a Robot Is Hard
Many autonomous mobile robots today use a simple rule called “pure pursuit” to follow a path. The robot looks a short distance ahead along the route, aims toward that point, and repeats this process rapidly. In practice, engineers must decide how far ahead the robot “looks” and how fast it moves. If the lookahead distance is too short, the robot reacts nervously and can weave from side to side. If it is too long, it reacts too slowly and cuts corners, especially on tight curves or at higher speeds. Outdoors, another complication arises: the robot’s position is estimated by combining satellite signals, motion sensors and wheel rotation data, each of which has its own errors and delays.
A Smarter Way to Steer and Set Speed
The authors propose an enhanced method called Pure Pursuit with Dynamic Steering Control (PP-DSC). Instead of keeping the lookahead distance and speed fixed, the robot adjusts both in real time based on how sharply it is turning. When the steering angle is small and the path is almost straight, the robot uses a longer lookahead and higher speed for smooth, efficient travel. As the steering angle grows on curves, the lookahead distance shrinks and the speed drops automatically, giving the robot more time to respond and reducing sideways drift. This behavior is implemented on a four-wheeled, car-like robot that uses a modern robotics software framework along with high-precision satellite positioning, an inertial sensor, and wheel encoders to estimate its motion.

Testing in Fields and Virtual Chemical Plants
To see how well PP-DSC works, the team ran outdoor experiments on three basic paths: a straight line, a loop, and a figure-eight, at speeds from 1 to 5 meters per second. They compared the new method with the standard pure pursuit approach. The improved controller kept the robot much closer to the intended path in every case. On straight lines, the average sideways error dropped to about five centimeters, and on curved paths the error stayed below eight centimeters. In contrast, the traditional method could drift by several tens of centimeters and showed larger peaks when entering or leaving bends, especially at higher speeds.
Adding Safety in Hazard Zones
The researchers also asked how such a robot might behave inside a chemical plant, where it could be tasked with inspecting hot reactors or carrying samples. Instead of building a full industrial testbed, they used a detailed computer model of a biodiesel plant that included the positions of equipment and zones with higher fire and explosion risk. They extended their controller with a safety factor that automatically slows the robot when it moves inside these hazard zones, based on a standard fire and explosion index used in process safety. Simulations showed that this safety-aware version of PP-DSC only slightly increased tracking error—less than one percent on average—while ensuring that the robot reduced its speed around dangerous equipment.
Choosing the Right Tool for Each Job
An interesting finding is that no single steering strategy was best everywhere. In open fields with gentle curves, the dynamic method clearly outperformed the traditional approach, keeping the robot’s path tight and smooth even at higher speeds. In the cramped geometry of a chemical plant, however, simple pure pursuit with a fixed lookahead sometimes did better, especially on tight loops and self-crossing “figure-eight” routes where the dynamic lookahead could accidentally shift the robot to the wrong branch of the path. The authors conclude that robots should switch between strategies depending on path shape: using the enhanced, safety-integrated controller for moderate curves and hazard-aware travel, and falling back to a fixed-lookahead scheme for very tight or looping tracks. For non-experts, the key message is that safe, reliable robot navigation in real-world plants and fields is not just about good maps and sensors—how the robot chooses where to look and how fast to go is just as important.
Citation: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
Keywords: autonomous mobile robots, path tracking, steering control, GNSS-RTK navigation, chemical plant safety