Clear Sky Science · en
Lightweight target detection and multi target tracking for UAV inspection in open pit mines
Smarter Eyes in the Sky
Open-pit mines are vast, harsh places where heavy trucks, excavators, and people move constantly. Keeping everything safe and running smoothly usually requires many workers on the ground and expensive positioning gear, yet small faults and intruders can still slip through. This paper explores how lightweight, intelligent drones can patrol these mines from above, automatically spotting equipment, people, and problems in real time while working within the tight computing limits of onboard electronics.
Why Mines Need Better Watchdogs
Modern mines already rely on tools like satellite positioning and special radio beacons to track trucks and machines. But these “active” systems have blind spots: signals can be blocked by steep walls, dust, or interference, and they only work on vehicles and people that carry the right devices. They also cannot show what a fault actually looks like. Drones, on the other hand, can fly over difficult terrain, capture rich images and video, and follow non-cooperative targets such as trespassing vehicles. The challenge is that powerful vision algorithms normally require heavy computers, while drones have limited weight, power, and processing capacity. The authors set out to design a detection-and-tracking system that is both accurate and light enough to run directly on a drone.
Teaching Drones to See Small and Hidden Targets
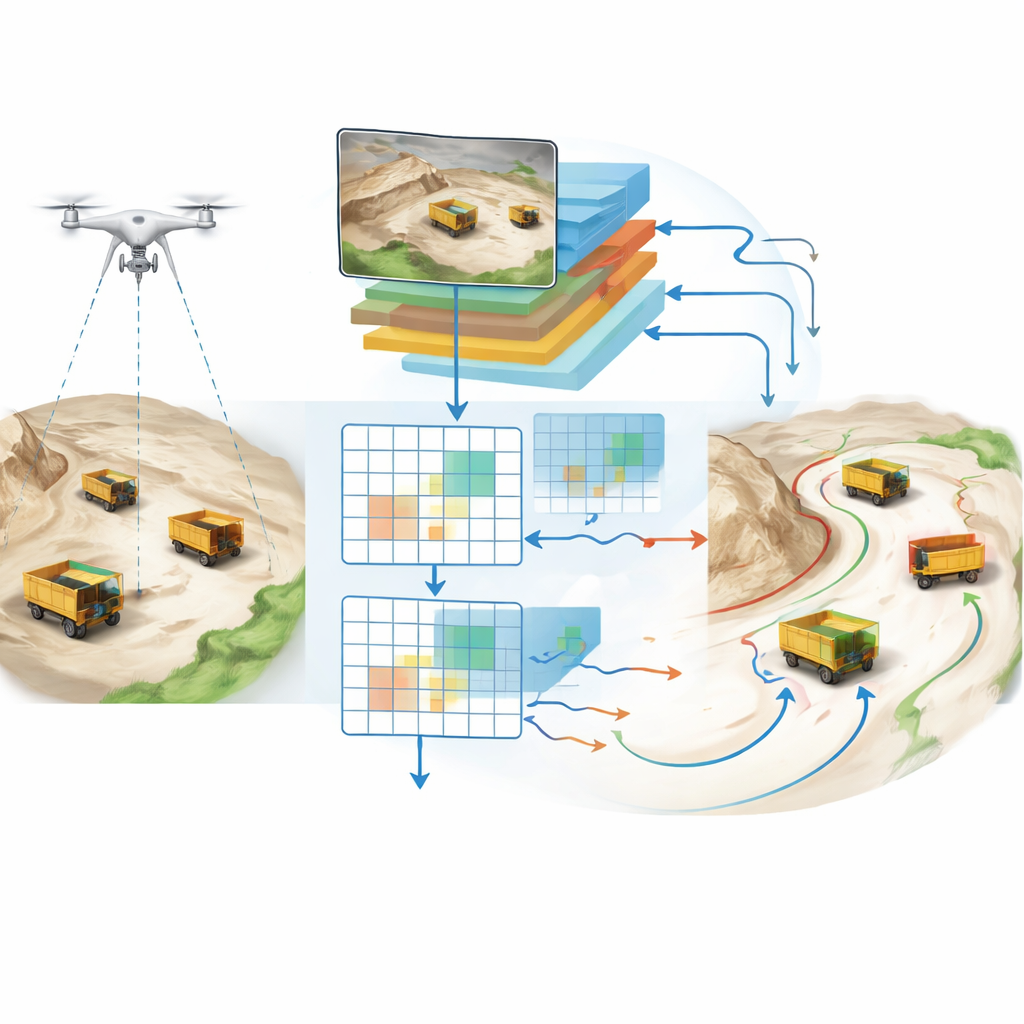
At the heart of the work is an upgraded version of a popular vision model called YOLO, tuned specifically for open-pit mines. The researchers reshape the model’s “backbone” so that it can follow the irregular outlines of trucks, excavators, and piles of rock, rather than relying on rigid, grid-like filters. They also redesign the part of the network that blends information from coarse and fine image scales, so that tiny, faraway machines and larger nearby ones are captured together without confusion. On top of this, a new, lightweight decision module focuses attention on the most informative details in the scene, helping the system distinguish small failure points and partially hidden machines from the cluttered background.
Making Powerful Models Fit on a Drone
Even with these improvements, a vision model can easily grow too big for drone hardware. To solve this, the team applies a careful pruning strategy that analyzes which internal connections contribute most to performance and then trims away the rest. This process shrinks the number of parameters and the amount of computation while preserving the strongest pathways in the network. At an optimal pruning level, the system keeps high detection accuracy yet cuts model size, operations, and response time enough to run on a compact embedded processor, using less power and extending flight time. Tests on a custom mine dataset and on a public drone benchmark show that the pruned model outperforms several well-known alternatives, especially for small and partly hidden targets.
From Snapshots to Smooth Tracks
Spotting objects in one image is only half the story; mines also need to know how each truck or person moves over time. For this, the authors enhance an existing multi-object tracking approach so that it better handles crowded scenes, look-alike vehicles, and sudden changes in motion. They create a combined similarity measure that considers where a target is, how it looks, and even whether it appears loaded or empty. They also correct the motion predictions to account for changing acceleration, such as when a truck turns or climbs a slope. Together, these steps reduce identity swaps—where one vehicle is mistaken for another—and keep track lines smooth and reliable, all while staying fast enough for real-time use on drone-grade hardware.
Toward Unmanned, Always-On Mine Patrols
Finally, the authors place their vision and tracking modules inside a multi-layer inspection system that can coordinate several drones, stream data over 5G and ad-hoc links, and feed results to ground control. In experiments over real mines, this setup sharply improves the accuracy and stability of equipment monitoring compared with traditional methods. For non-specialists, the key takeaway is that the study shows a practical route to having small, efficient flying robots continuously guard huge industrial sites, spotting small faults, unregistered visitors, and risky situations before they escalate—without needing bulky computers or dense networks of beacons on every vehicle.
Citation: Liu, G., Zhang, L., Lei, J. et al. Lightweight target detection and multi target tracking for UAV inspection in open pit mines. Sci Rep 16, 8084 (2026). https://doi.org/10.1038/s41598-026-38676-4
Keywords: drone inspection, open-pit mining, object detection, multi-object tracking, lightweight AI models