Clear Sky Science · en
A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems
Keeping Machines on Track When Parts Go Wrong
Modern technologies—from robotic arms on factory floors to chemical plants regulating acidity—depend on sensors and actuators that quietly keep everything running. But when these parts drift, stick, or fail, a system can become unsafe long before anyone notices. This paper introduces a new way to let machines sense and correct such problems on their own, even when engineers do not have a precise mathematical model of how the system behaves inside.
Why Hidden Problems Are So Hard to Catch
In many real-world settings, the behavior of a system is highly nonlinear: small changes in input can cause large, unexpected swings in output. Traditional control methods assume that designers know the equations governing this behavior, and that sensors and actuators mostly work as expected. In practice, components age, get noisy, or are replaced with slightly different hardware. Conventional fault-tolerant controllers either build in fixed safety margins (passive methods) or rely on accurate models to detect and accommodate faults (active methods). Both approaches struggle when the system changes over time or when its internal workings are not fully known. The authors argue that industry needs controllers that learn from live data, recognize when sensors or actuators misbehave, and correct for those faults in real time without needing a detailed blueprint of the system.
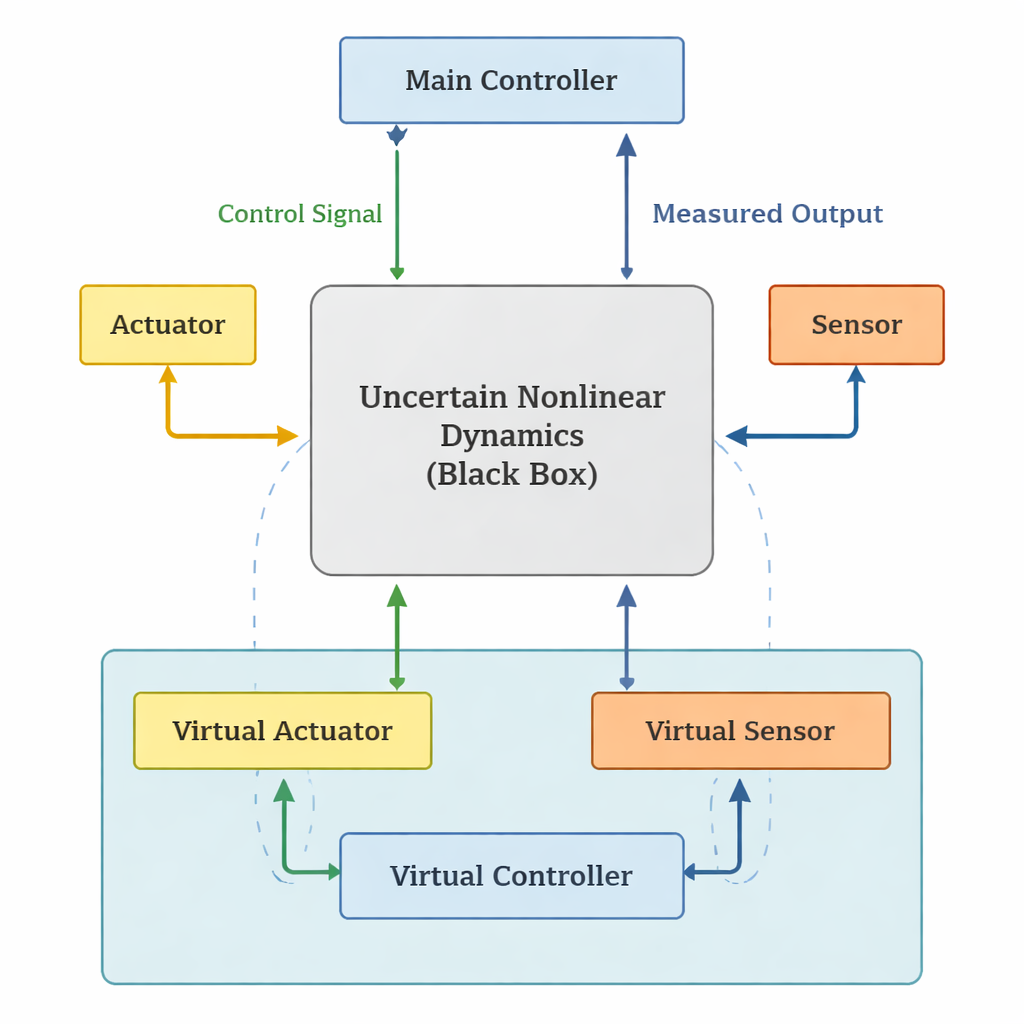
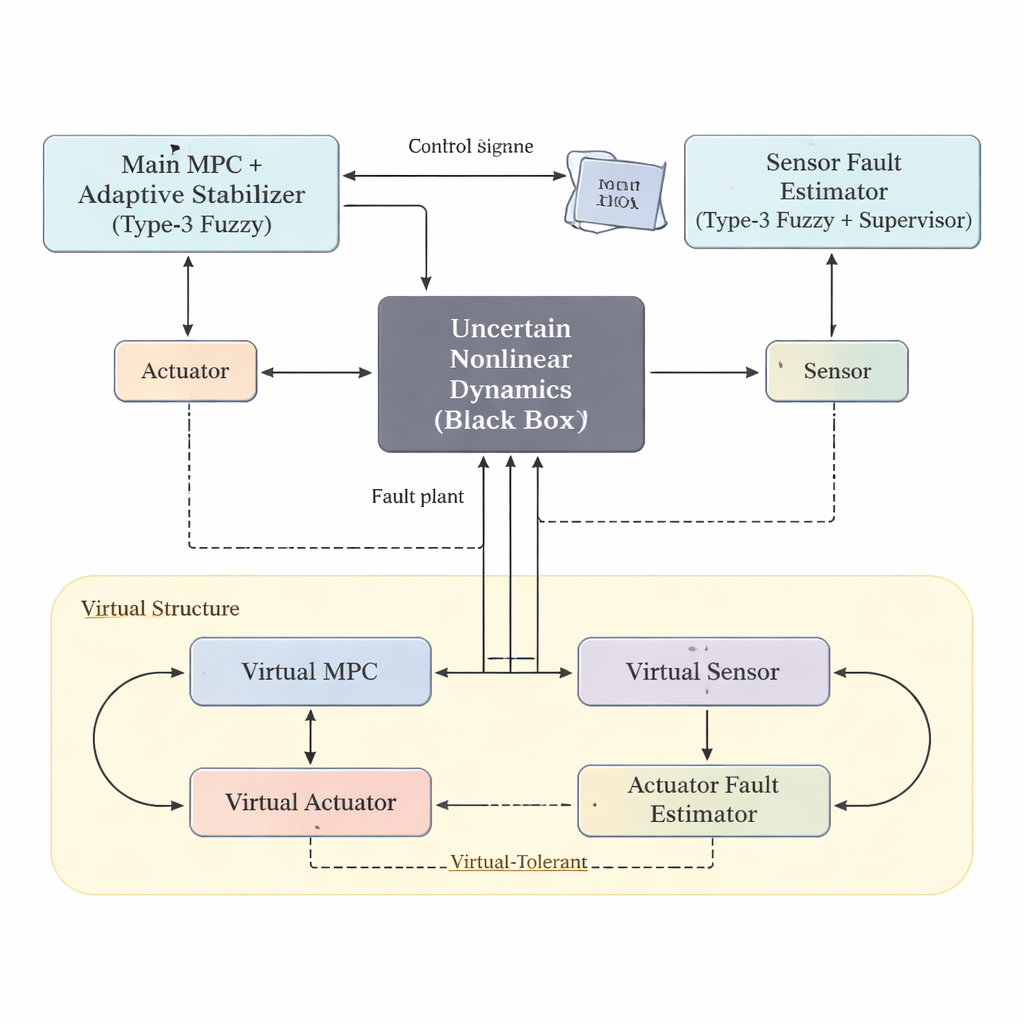
A Learning Controller That Treats the System as a Black Box
The proposed framework views the plant purely as a black box: it only sees the control signals sent in and the outputs measured by sensors. At its core is a type-3 fuzzy logic system, an advanced form of fuzzy modeling designed to handle strong uncertainty and measurement noise. This fuzzy system learns a compact input–output description of the unknown dynamics online, while a model predictive controller (MPC) uses that learned model to plan future control moves over a short horizon. An adaptive stabilizing unit runs in parallel, ensuring that even if the model is imperfect or parameters drift, the combined feedback keeps tracking errors bounded and eventually driven toward zero.
Watching the Watchers: Detecting Sensor and Actuator Faults
The framework splits fault handling into two coordinated parts. First, a sensor-fault unit uses two additional type-3 fuzzy estimators plus a supervisory block to infer how much a sensor reading has deviated from its expected steady-state value. From this, it generates a corrective signal that effectively “counter-bends” the faulty measurement so that the main controller continues to see a trustworthy output. Second, the method builds a virtual structure that mirrors the real system: it includes a virtual sensor, a virtual actuator, its own fuzzy identifier, and a virtual MPC. Because the virtual loop does not suffer the real actuator’s degradation, differences between the virtual and real control paths reveal how badly the true actuator is failing. A simple formula turns this gap into an estimated fault level, which is then compensated in the main control signal.
Proving Stability and Testing on Robots and Chemical Tanks
To show that the approach is not just intuitive but mathematically sound, the authors construct a Lyapunov function—a kind of energy measure—that includes tracking errors, modeling errors, and the adjustable fuzzy parameters. They derive update laws for the adaptive terms so that this energy always decreases, demonstrating that errors shrink over time even with disturbances and faults. Simulations then test the method on two very different examples: a single-link robotic arm and a pH-neutralization process in a chemical tank. In both cases, the true dynamics are treated as fully unknown, parameters vary, and both sensor and actuator faults are injected during operation. The controller maintains accurate tracking, quickly learns the size of faults, and keeps risk and error measures low, outperforming simpler fuzzy controllers and other advanced fault-tolerant schemes from the literature.
What This Means for Real Systems
For non-specialists, the key message is that this method gives complex systems a kind of built-in self-awareness. Instead of relying on a perfect model or manual retuning by engineers, the controller continuously learns from the data it sees, notices when sensors or actuators start lying or weakening, and automatically corrects its actions to keep performance stable. Because it only needs input and output data, it can, in principle, be applied to many different machines without redesigning everything from scratch. While the results are based on simulations and hardware issues still need to be explored, the work points toward more resilient robots, industrial processes, and other autonomous systems that stay reliable even when their components and environments are far from ideal.
Citation: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
Keywords: fault-tolerant control, fuzzy logic, model predictive control, sensor and actuator faults, nonlinear systems