Clear Sky Science · en
Investigation of magnetic orientation effects on interior rotor BLDC motor performance for EVs: a response surface methodology approach
Quieter, Smoother Motors for Future Electric Rides
Electric vehicles may seem silent and effortless from the driver’s seat, but inside their motors a lot of invisible tug-of-war is going on. Tiny magnetic forces can make a wheel jerk, buzz, or waste energy as heat. This paper explores a new way to arrange the magnets inside a compact motor so that small electric vehicles—like hybrid mopeds—run more smoothly, quietly, and efficiently, without needing a bigger battery.
Why Motor Smoothness Matters on the Road
Modern electric vehicles often rely on brushless DC motors, which use permanent magnets instead of mechanical brushes to spin the rotor. These motors are light, efficient, and powerful, making them ideal for cramped spaces like two-wheelers. But they suffer from an unwanted effect called cogging torque: a magnetic “cogging” between the rotor magnets and the stator teeth that causes vibration, torque ripple, and jerky motion, especially at low speeds. For riders, that translates into noise, uneven acceleration, and lost efficiency. Reducing cogging torque while keeping high torque and efficiency is therefore a key design challenge for cleaner, more pleasant electric mobility.
A New Knob to Turn: How the Magnets Are Pointed
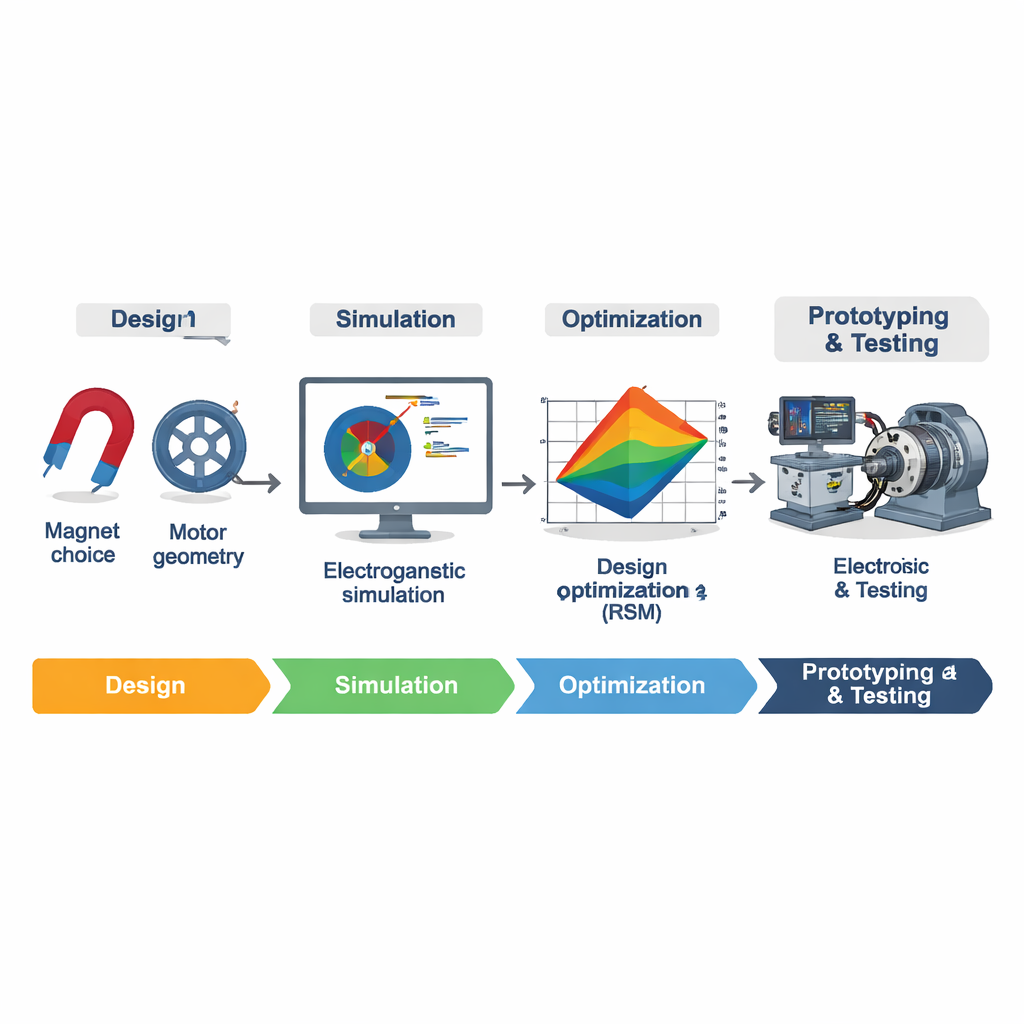
Most earlier research tried to tame cogging torque by reshaping the metal parts of the motor—changing slot shapes, pole widths, or air gaps—or by skewing the stator. In this study, the authors keep the overall motor size and stator unchanged and instead treat magnet orientation and rotor skew angle as the main “design knobs.” They focus on an interior rotor brushless DC motor, where magnets are embedded inside the spinning core rather than mounted on the surface. Using Siemens Simcenter Motorsolve software, they build 12 virtual prototypes that combine different magnet angles (10°, 20°, 30°) with different skew angles (0° to 40°). For each case, they calculate important outcomes: average torque, efficiency, cogging torque, and the shape of the back electromotive force (back EMF) waveform, which strongly affects how easily the motor can be controlled.
Finding the Sweet Spot with Smart Statistics
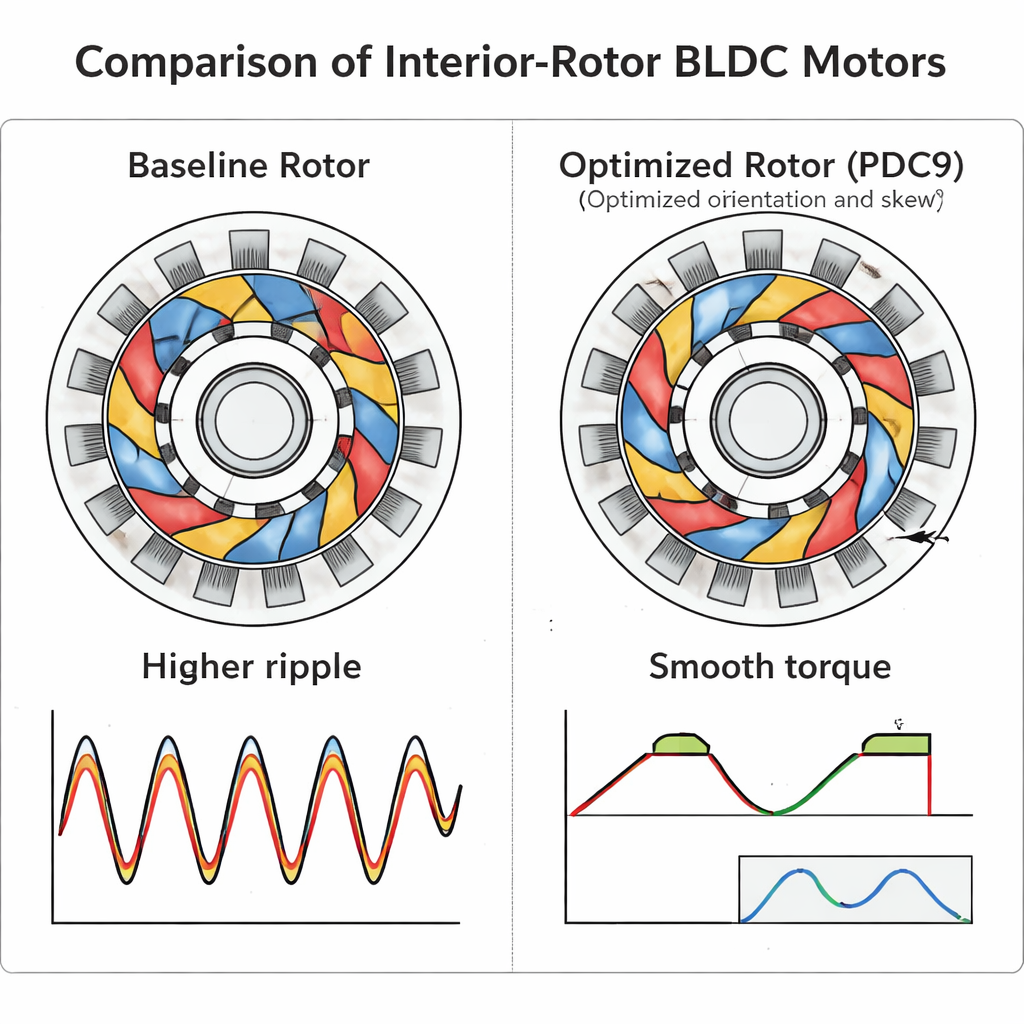
To move beyond trial-and-error, the team uses a statistical technique called Response Surface Methodology (RSM). Instead of testing every possible combination of angles, RSM builds a mathematical “map” showing how performance changes as magnet orientation and skew angle vary together. They then define what “good” means—high efficiency, high torque, and strong back EMF, but very low cogging torque—and compress those goals into a single desirability score. By exploring this response surface, they identify the combination that offers the best overall trade-off. The optimal virtual design points to a magnet orientation of 20° and a rotor skew angle of 40°, a configuration the authors label PDC9. This design promises about 43% more torque than a baseline layout, near-zero cogging torque, and efficiency above 94%, while preserving the trapezoidal back EMF waveform preferred for brushless DC drives.
From Screen to Workshop: Building and Testing the Motor
To show that the idea works outside the computer, the researchers build a real motor following the PDC9 specifications. They use laminated electrical steel for the stator and rotor, and high-energy neodymium-iron-boron magnets inside the rotor, all sized for a 48 V, roughly 1.5 kW drive suited to a hybrid moped. The prototype is then run on a test bench with a dynamometer, where torque, speed, and voltage are measured across a range of operating points. The experimental motor delivers about 3.8 Nm of torque at its rated speed with an efficiency close to 92%, and produces the desired trapezoidal back EMF shape. While slightly below the idealized simulation values—as expected due to friction, manufacturing tolerances, and extra losses—the results closely follow the predicted trends, confirming that careful magnet orientation and skewing can deliver smoother, quieter performance without enlarging the machine.
What This Means for Everyday Electric Vehicles
In simple terms, this work shows that how you “aim” the magnets inside a motor can be just as important as how big they are or what they are made of. By tilting and skewing the magnets to the right angles, the authors nearly erase the internal magnetic snagging that causes bumps and noise, while boosting useful torque and keeping efficiency high. For riders, that means gentler take-offs, less vibration, and better battery usage in small electric vehicles. For designers and manufacturers, the study offers a practical recipe—validated by both simulation and hardware—for tuning interior-rotor brushless DC motors to meet the growing demands of urban electric transport.
Citation: Chandra, V., Manoharan, P.S., Thenmozhi, G. et al. Investigation of magnetic orientation effects on interior rotor BLDC motor performance for EVs: a response surface methodology approach. Sci Rep 16, 7011 (2026). https://doi.org/10.1038/s41598-026-37981-2
Keywords: brushless DC motor, cogging torque, magnet orientation, electric vehicle motor, rotor skew angle