Clear Sky Science · en
Square integrable solutions and stability of a second-order stochastic integro-differential equation
Why past and randomness matter for engineered systems
Many modern devices—from flexible robot arms to vibration-damping bridges—do not just respond to what is happening right now. Their motion is shaped by past movements, delayed sensor signals, and ever‑present random vibrations from the environment. This paper asks a fundamental question about such systems: even when they are buffeted by noise and remember their past, can we guarantee that their motions stay under control instead of growing without bound?
A new way to track noisy systems with memory
The authors study a broad family of mathematical models called second-order stochastic integro-differential equations with delays. In plain terms, these equations describe how a quantity such as displacement changes when it depends on its current position and speed, its history over time, delayed feedback, and random fluctuations. This kind of description is natural for viscoelastic materials, vibration absorbers, and feedback-controlled mechanical or mechatronic systems. A key difficulty is that traditional tools often treat only one complication at a time—either randomness, or delays, or memory—but not all three together. Here, the authors design a more powerful analytical tool, a Lyapunov–Krasovskii functional, carefully built to capture the combined effect of noise, variable time delays, and memory terms.
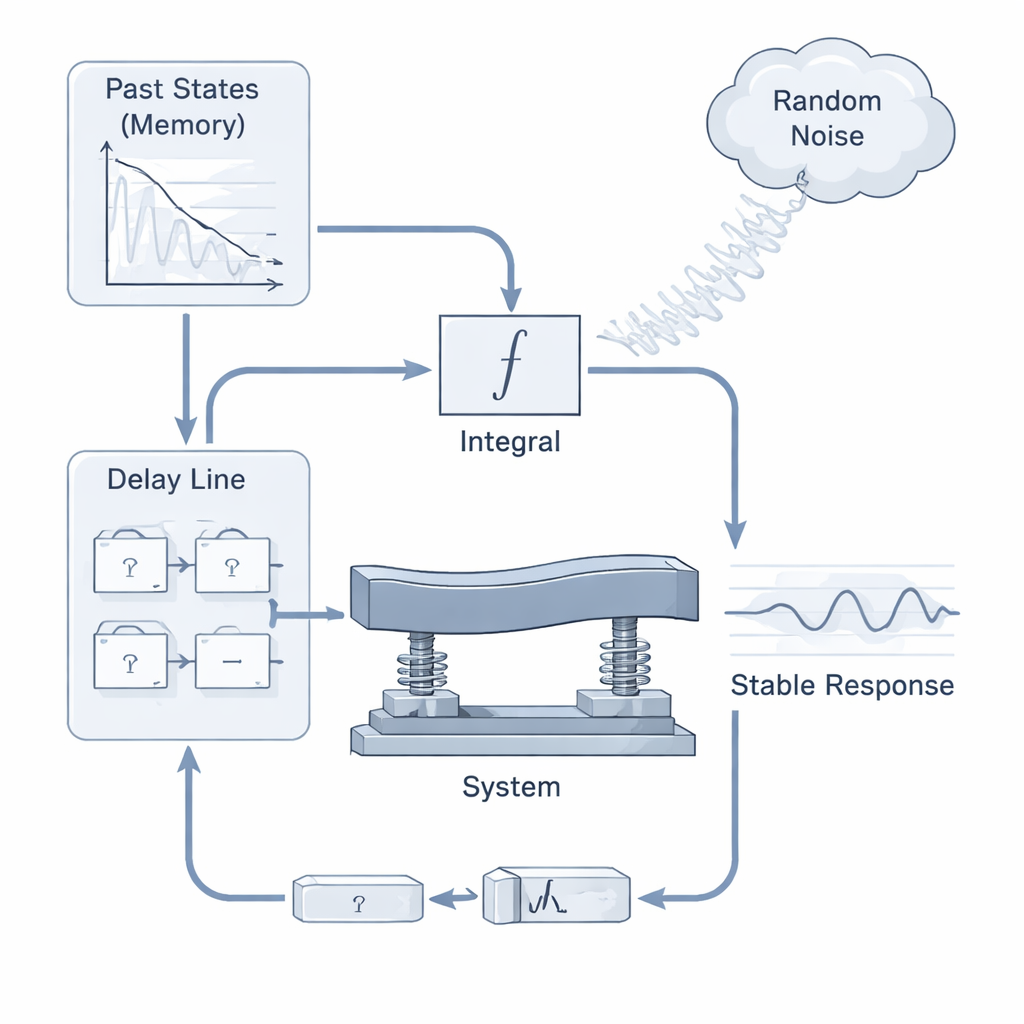
Keeping motion bounded despite delays and noise
Using this new functional, the paper derives conditions under which the modeled systems behave well in the long run. Specifically, the authors show that, if certain natural bounds are imposed on how strong the feedback, damping, and memory effects can be, then every solution remains bounded over time. Moreover, the state of the system tends to settle toward a rest position in a stochastic sense: random disturbances may cause short-term wiggles, but these do not accumulate into runaway motion. This property is called stochastic asymptotic stability. The conditions are expressed in terms of simple inequalities on the coefficients that describe damping, stiffness, delay size, and the intensity of the random noise. Engineers can, in principle, use these inequalities as design guidelines to ensure safe operation.
Square integrable motion and energy control
Beyond showing that motions stay bounded, the authors prove a stronger property involving what they call square integrability. Translated into more familiar language, this means that if one looks at the total accumulated energy of the system—built from the square of the displacement and the square of its rate of change—this total remains finite over the entire future of the motion. Finite accumulated energy implies that, on average, oscillations must die out rather than persist indefinitely. Mathematically, this is established by showing that the Lyapunov–Krasovskii functional decreases along the system’s trajectories fast enough that the integral of the squared motion converges. This result ties the abstract functional directly to a physically meaningful energy-like quantity.
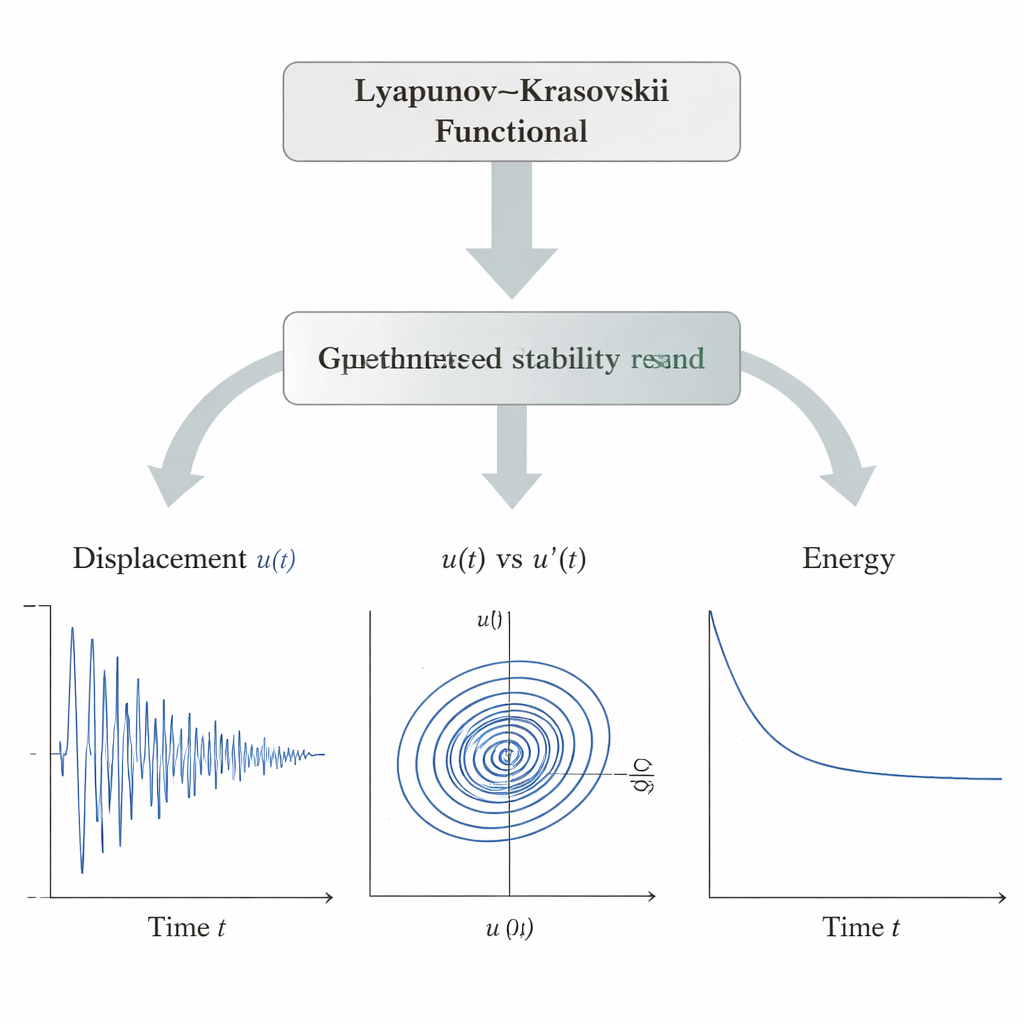
Putting the theory to the test with simulations
To illustrate the abstract results, the authors simulate two detailed model systems that fit within their general framework. Using a combination of the Euler–Maruyama method for the random part and numerical quadrature for the memory integrals, they generate example trajectories over time. The simulated displacements exhibit an initial transient phase with noticeable random oscillations, then settle into small bounded fluctuations around the rest state. Phase plots show spiral-like curves that remain trapped in a confined region, and computed energy curves decrease and stay bounded. These numerical experiments confirm that the theoretical stability and square‑integrability conditions do indeed predict realistic, well-behaved motion, even when delays and random forces are present.
What this means for real-world systems
For a lay reader, the main take‑home message is that the paper offers a rigorous way to certify that complex, delay‑ridden, noisy systems will not spiral out of control. By constructing a new type of energy-like measure that accounts for both memory and randomness, the authors show when oscillations remain bounded and their overall energy stays finite. This advances the mathematical foundations behind the design of vibration control devices, flexible mechanical structures, and other technologies where delayed feedback and random disturbances are unavoidable. The same ideas could inform future work in areas as varied as biological regulation, economic dynamics, and networked control, wherever the past and chance jointly shape the system’s evolution.
Citation: Oudjedi-Damerdji, L.F., Meziane, M., Djidel, O. et al. Square integrable solutions and stability of a second-order stochastic integro-differential equation. Sci Rep 16, 7158 (2026). https://doi.org/10.1038/s41598-026-37970-5
Keywords: stochastic stability, delay differential equations, Lyapunov methods, integro-differential systems, vibration control