Clear Sky Science · en
Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot
Robots That Travel on Invisible Rails
Imagine a robot that can glide a heavy camera across a stadium, lift building materials over a construction site, or guide a rehab device around a patient, all while hanging from cables instead of riding on rigid arms. This paper introduces a new kind of cable‑suspended robot whose structure can be reshaped on demand, allowing one machine to adapt to many different jobs while squeezing the most useful motion out of its working space.
Building a Robot from Swappable Pieces
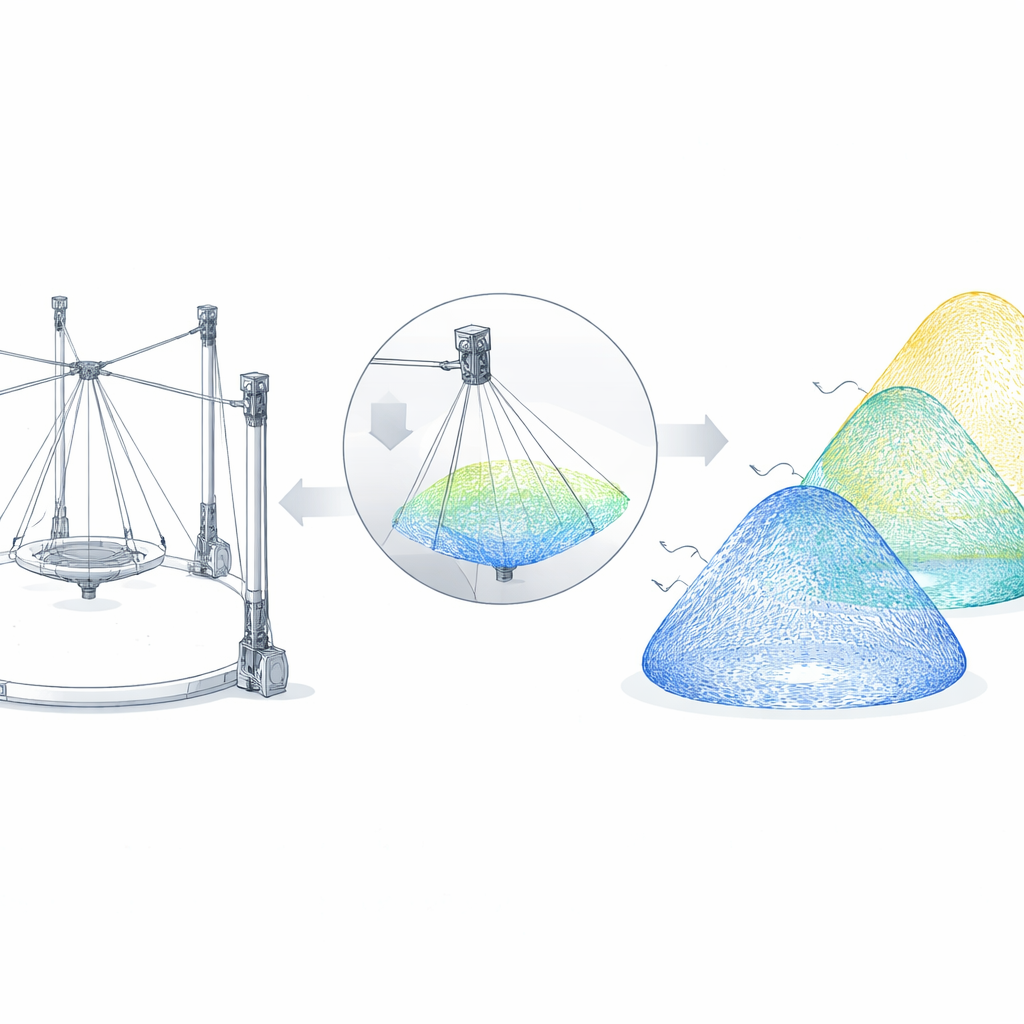
At the heart of the study is a modular cable‑suspended parallel robot (MCSPR). Instead of fixed metal arms, it uses up to six identical “branches,” each a tower with motors, pulleys and a cable that connects to a central moving platform, called the end‑effector. These branches sit around a circular track and can be added, removed, rotated, or raised and lowered. By rearranging them, the same hardware can behave like several different robots: with two branches it moves in a plane, with three or four it moves freely in space, and with five or six it can also tilt and rotate the platform in multiple directions.

Planning the Skeleton of a Shape‑Shifting Machine
Designing such a flexible system is not just a matter of bolting parts together. The authors use a systematic "structural synthesis" approach, treating each cable, pulley and joint as a basic building block in a network. With graph‑like diagrams, they map how these elements connect so the platform ends up with the desired freedoms of motion—such as sliding along three axes or rotating about them. This catalog of modules and connections serves as a design toolkit: depending on the motion a task requires, a designer can pick how many branches to use and where to place them on the circular guideway, confident that the resulting structure will behave as intended.
Knowing Which Way the Platform Will Move
Because the platform hangs from cables that can only pull, not push, predicting its motion is more involved than for traditional robots. The team develops a unified mathematical description that works for all five main configurations of the MCSPR. Given a desired position and orientation of the platform, they compute exactly how long each cable must be and how fast its length should change. They then build a physical prototype and command the platform to trace a smooth spiral path in space. Sensors along the cables record the actual motions, which match the predicted ones closely. This confirms that the model can reliably steer the robot even as its geometry is reconfigured.
Finding Where the Robot Can Safely Hold Still
Equally important is understanding where the suspended platform can stay in balance. If any cable slackens, control is lost. The authors focus on what they call the static equilibrium workspace: the region of space where all cables can stay under positive tension while only gravity acts on the platform. Using a Monte Carlo approach, they randomly sample many possible platform positions and orientations and check, for each one, whether the cable tensions needed to hold that pose are all within safe limits. The accepted samples form a three‑dimensional cloud that outlines the working volume available to the robot.
Stretching the Robot’s Reach by Smart Tuning
Because the MCSPR’s branches can change height and angle, and the platform can carry loads of different masses and tilt angles, the size and shape of this safe volume are not fixed. The researchers systematically vary these factors in a six‑branch setup. They show that a heavier payload sharply shrinks the region where the robot can stand still, while clever choices of branch heights and angular spacing can enlarge it. They then pose an optimization problem: adjust the payload, branch heights, branch angles and platform tilt range to maximize the volume of safe workspace. Running this search in software, they find a configuration in which the reachable, balanced space is several times larger than in a naive layout.
Why This Matters for Real‑World Jobs
To a non‑specialist, the key message is that this robot can be reshaped almost like a construction kit, yet still be analyzed and tuned with precision. By combining modular hardware with careful mathematical planning and computer‑based search, the authors turn a single cable‑suspended machine into a versatile platform that can be adapted to many tasks— from precision manufacturing to rehabilitation—while making the most of its operating space and keeping loads safely supported.
Citation: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
Keywords: cable robots, modular robotics, reconfigurable mechanisms, robot workspace, parallel manipulators