Clear Sky Science · en
Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths
Robots That Move Smoothly and Safely
Industrial robots now share crowded workspaces with people, tools, and conveyor systems. In these tight quarters, a robot arm cannot simply reach from point A to point B; it must do so without collisions, with low energy use, and without shaking itself—or nearby equipment—to pieces. This paper describes a practical way to plan such careful motions for a common six-joint industrial arm, turning rough, computer-found paths into smooth, energy-aware movements that can be executed safely on real factory hardware.
Why Planning a Simple Reach Is Surprisingly Hard
When a robot arm moves, many things must be balanced at once. The path should be short so tasks finish quickly, energy use should be modest to limit heat and wear, and the motion should be gentle enough that the arm does not jerk or vibrate. Classic approaches draw smooth mathematical curves (such as splines) through a few hand-picked waypoints, which works well in open space but can become inefficient or even unsafe in cluttered cells. Newer sampling methods, like Rapidly Exploring Random Trees (RRT), are good at threading through complex obstacle fields but tend to produce paths with sharp bends that are hard on motors and gears. The authors argue that neither family of methods is enough on its own; instead, they combine them into a two-stage framework.
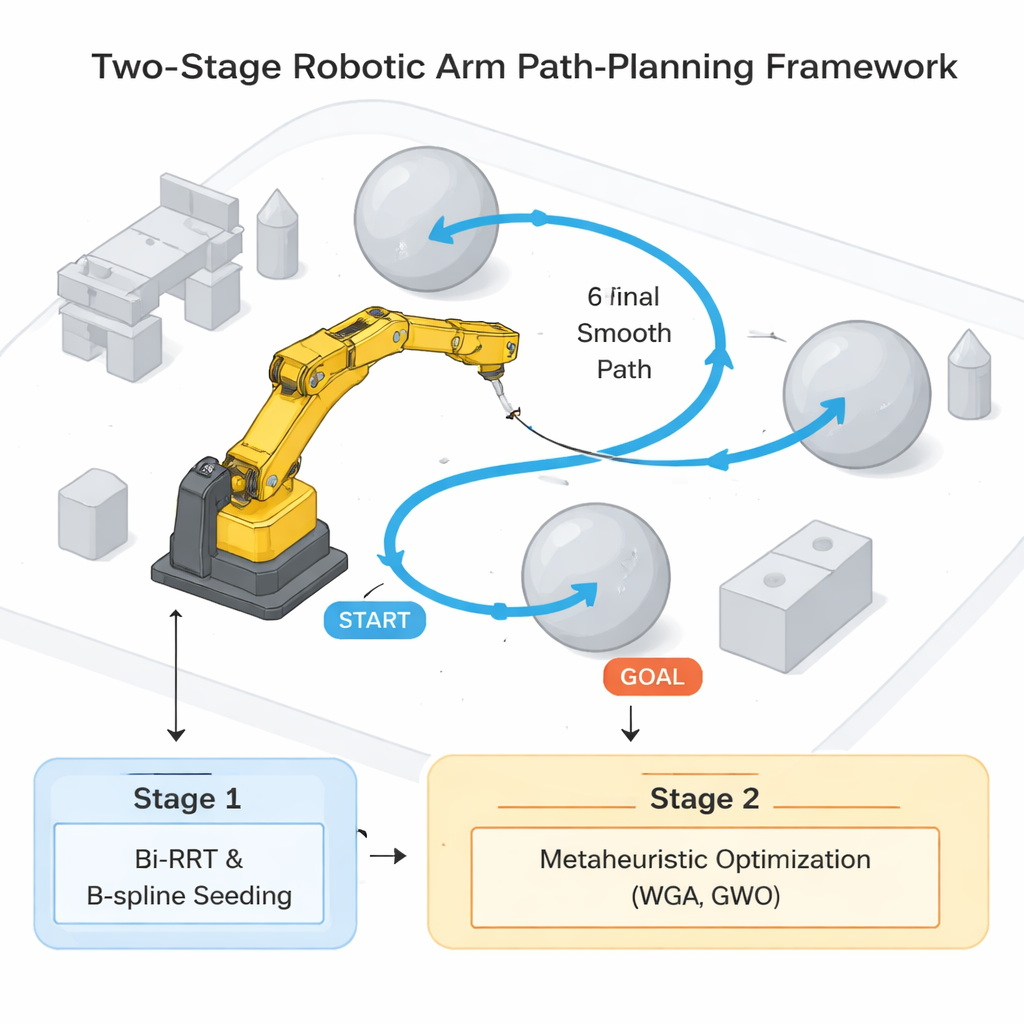
A Two-Stage Roadmap for Robot Motion
In the first stage, the team builds a safe “reference route” in the robot’s joint space rather than just the hand’s position in space. They start from a smooth B-spline curve that links the start and goal positions while skirting spherical obstacles with a safety margin. This curve then guides a bidirectional RRT (Bi-RRT) planner that grows two random trees—from the start and from the goal—until they meet in a collision-free path. Along the way, every tentative motion of the whole arm is checked against simplified obstacle shapes. Once a path is found, redundant bends are trimmed by “short-cutting,” and the result is re-expressed as a time-parameterized spline that the robot could, in principle, follow.
Teaching the Robot to Move More Gently
The second stage takes this feasible but imperfect path and tunes it for quality. Here, the authors use two nature-inspired optimization methods: a hybrid Whale–Genetic Algorithm (WGA) and the Grey Wolf Optimizer (GWO. Both act on a limited set of control points and timing knobs along the original spline, but they are only allowed to move these points within precomputed safe corridors around the path. Each candidate motion is scored by a single combined measure that blends three ingredients: how far the robot’s hand travels, how much joint-level energy is used (based on each motor’s characteristics), and how “jerky” the joints are—how quickly their accelerations change over time. By repeatedly proposing, testing, and improving candidate paths, these optimizers search for motions that are still collision-free but far smoother and more execution-ready.
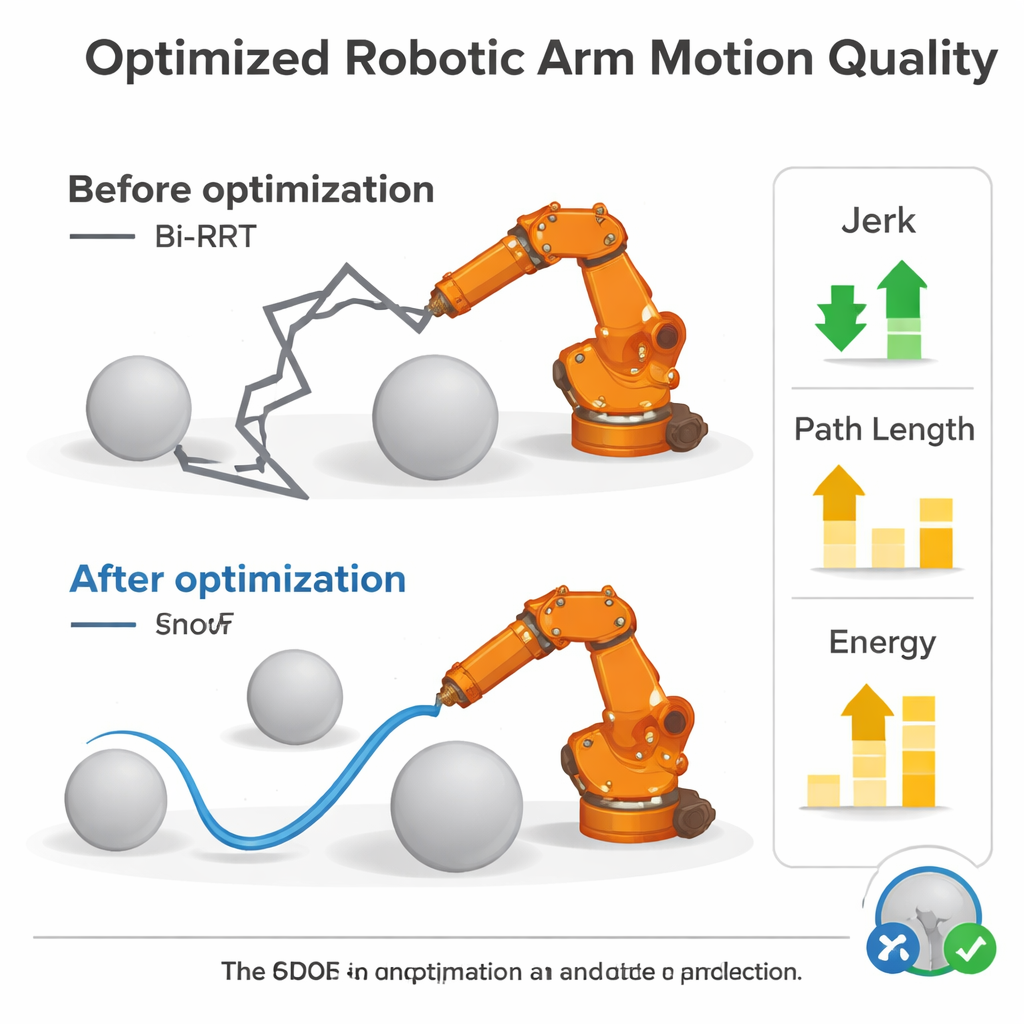
What the Simulations Reveal
The authors test their pipeline on a digital model of a widely used industrial arm, the KUKA KR 4 R600, moving through a three-obstacle scene over a fixed two-second move. A pure spline-based solution is already reasonably smooth but does not systematically exploit all possible safe routes. A Bi-RRT with short-cutting finds a path of similar geometric length and even lower energy use, but with a major downside: its jerk index—an indicator of how abruptly the joints change acceleration—is about ten times higher, signaling a motion that would likely excite vibrations and strain in a real machine. After applying WGA or GWO, the jerk is slashed by roughly 94–96 percent relative to this raw Bi-RRT path. This dramatic smoothing comes at the cost of only modest increases in travel distance (about 15–17 percent) and energy (about a factor of two), a compromise the authors argue is well worth it for real equipment.
From Theory to Factory Floor
For a non-specialist, the key takeaway is that the authors provide a concrete recipe—and MATLAB-based tools—for turning a robot’s first, rough idea of how to move into a polished, hardware-friendly motion. Their approach first guarantees that a path exists through a cluttered environment, then reshapes that path so the arm moves with fewer jolts while still respecting all joint limits and clearances. The end result is a family of motions that a real industrial robot can execute more safely and reliably, laying the groundwork for future extensions where robots share workspaces with humans and adapt their movements in real time using cameras and even brain-signal interfaces.
Citation: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
Keywords: robot path planning, industrial robot arm, collision avoidance, motion smoothness, metaheuristic optimization