Clear Sky Science · en
Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments
Robots That Team Up in the Air and on the Ground
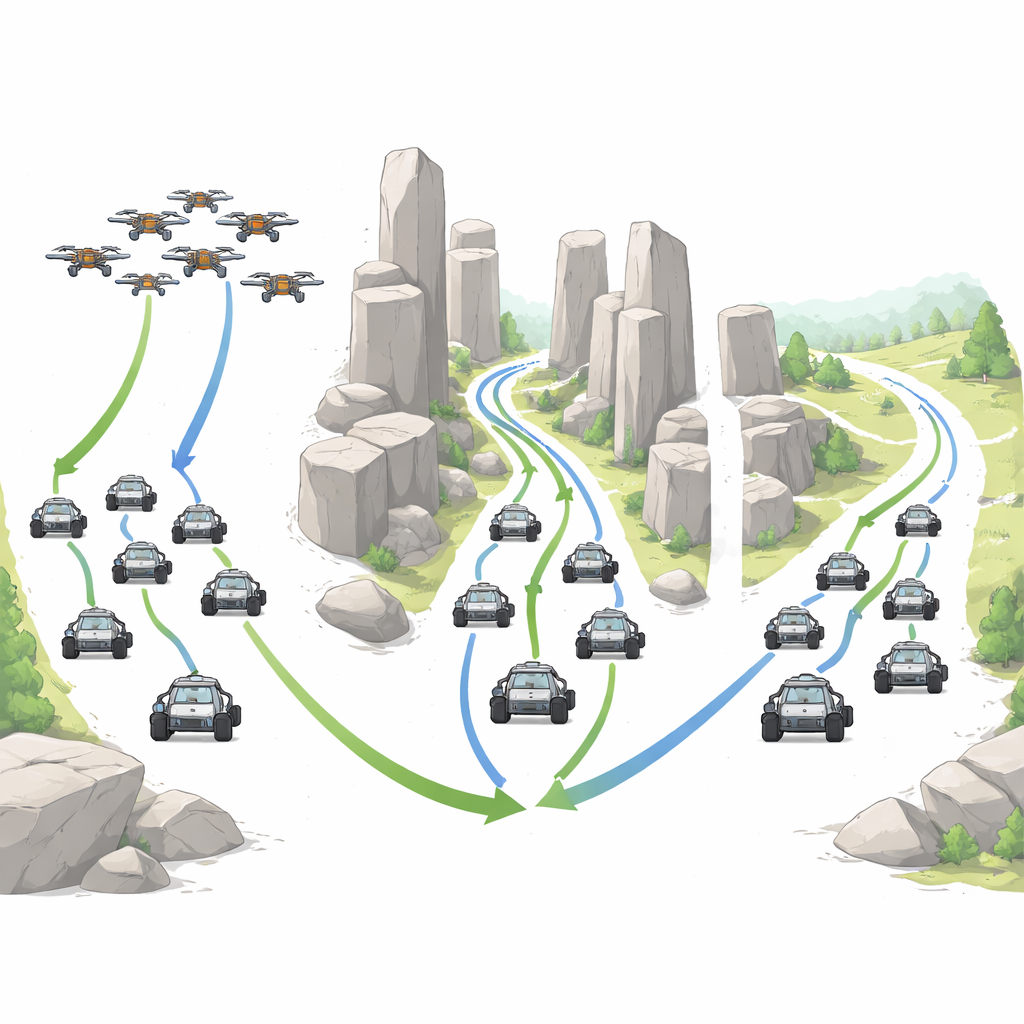
Imagine a swarm of small flying drones scouting above a disaster zone while rugged ground vehicles snake through rubble below, all moving as one coordinated team. This paper explores how to keep such mixed robot groups together in tight, obstacle-filled spaces without collisions or frantic re-planning. The authors propose a new way for air and ground robots to share a stable formation, squeeze through narrow gaps, and still arrive quickly and safely at their goal.
Why Mixed Robot Teams Are Hard to Coordinate
Flying drones and wheeled ground vehicles behave very differently. Drones dart through three-dimensional space and are easily pushed off course by wind. Ground vehicles must obey turning limits and deal with rough terrain. Yet many real missions—from search and rescue to infrastructure inspection—would benefit if these robots could travel together as a single, three-dimensional group. Existing methods often treat formation keeping and obstacle avoidance as separate problems. When the environment gets cluttered, formations tend to break apart and later reassemble, wasting time and increasing the chance of collisions.
A New Way to Keep the Group Together
To tackle this, the authors design a framework they call RG–ASAPF, which tightly couples how the group is shaped and how it moves. At its core is a mathematical description of the formation as a "rigid" structure: the desired distances between robots are chosen so that the overall shape is uniquely determined, like the bars of a stable 3D scaffold. Each robot then uses a shared rule to adjust its motion so that these distances are recovered and maintained, even while the formation moves and turns. This rule is crafted to work for both flying and driving robots, and it adapts online to uncertainties such as unmodeled friction or small external pushes.
Letting the Formation Breathe Through Tight Spaces
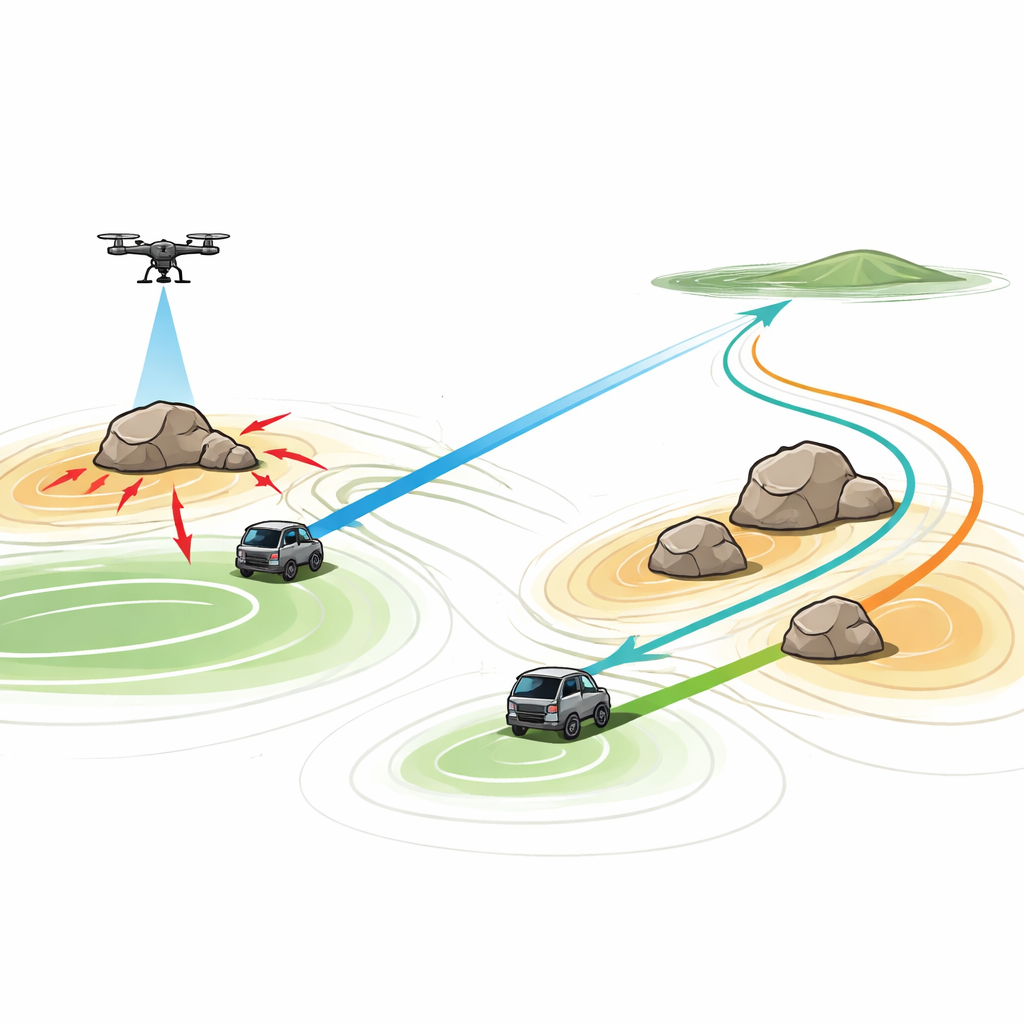
Real environments are rarely open fields; they are filled with buildings, trees, vehicles, and moving objects. A formation that is safe in open space may be too large to pass through a narrow alley or a dense cluster of obstacles. The proposed method allows the formation to smoothly scale—shrinking or expanding its overall size—while preserving its basic structure. The team introduces a leader ground vehicle that plans a path using an artificial potential field, where the goal acts like an attractor and obstacles push the formation away. Unlike traditional potential fields, which can get stuck in dead ends or cause jittery motion, their "adaptive safe" version continuously tunes how strongly obstacles repel the robots so that they keep a safe distance without becoming overly cautious or trapped.
Smarter Paths Through Clutter and Motion
The potential field is further refined so that the overall "landscape" of attraction and repulsion always has its lowest point at the goal. This helps prevent the formation from being stranded at awkward spots between obstacles. The strength of the repulsive effect is adjusted on the fly using a simple learning rule borrowed from early neural network training. When robots edge too close to obstacles, the repulsion automatically grows; when there is ample clearance, it relaxes. If the environment becomes so tight that even a scaled-down formation cannot pass safely, the method activates a fallback: the team briefly pauses, inflates a notional safety corridor, and re-plans a safer route around the problematic area before continuing.
Testing in Virtual Worlds
To see how well the method works, the authors run extensive computer simulations with mixed teams of drones and ground vehicles. They test open areas with only a few obstacles, dense mazes with many barriers, scenes containing moving obstacles, and formations that must change into more complex 3D shapes such as a hexagonal prism. In all these cases, the formation holds together in three dimensions, safely avoids static and moving obstacles, and adjusts its size when needed. The robots follow smooth, efficient paths rather than zigzagging around barriers. When compared to several popular planning methods—including classic and improved potential fields, particle swarm optimization, and both linear and nonlinear model predictive control—the new approach finds paths that are typically shorter, smoother, and less energy-hungry, while also computing them faster than heavy optimization-based techniques.
What This Means for Real-World Missions
For a non-specialist, the key message is that the paper shows how to make mixed teams of flying and driving robots move like a single, flexible body through cluttered 3D spaces. Instead of breaking formation whenever obstacles appear, the group can bend, shrink, and reorient while staying coherent and safe. This could translate into faster, more reliable robot support during disasters, industrial inspections, and security patrols. While the current work is demonstrated in simulations and relies on a designated leader vehicle, the authors outline future steps toward more fault-tolerant teams and real-world experiments, bringing the vision of tightly coordinated air–ground robot swarms closer to practice.
Citation: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
Keywords: multi-robot formation, UAV UGV cooperation, obstacle avoidance, motion planning, swarm robotics