Clear Sky Science · en
An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending
Safer hands-on work from a safe distance
Many of the most dangerous jobs on Earth—and in space—still require human judgment and dexterity. Think of repairing a damaged nuclear facility, handling explosives, or stabilizing a spacecraft. This study presents a new kind of powered arm exoskeleton that lets a person control a distant robot arm as if it were their own, while staying well away from harm. The device focuses on making the robot move and “feel” like a natural extension of the wearer’s body, even as it adapts to different arm sizes and changing forces in the environment.
Why remote arms matter
Robots already work underwater, in disaster zones, and inside reactors, but most are either preprogrammed or guided with simple joysticks. That limits what they can do when conditions suddenly change. Teleoperation systems—where a person controls a remote robot in real time—offer a middle path, pairing human decision-making with robotic strength and reach. Earlier systems could move tools around, but they often lacked precise feedback about forces and could not easily adjust to different users’ bodies. The result was clumsy motion, poor “feel,” and extra strain on both the operator and the machine.
A wearable robot arm that truly fits
The team built a wearable upper-limb exoskeleton with seven powered joints that line up with the shoulder, elbow, and wrist. Lightweight materials such as carbon fiber and aluminum keep the device responsive instead of heavy and sluggish. A major innovation is that the length of the exoskeleton’s upper arm and forearm can be adjusted smoothly, not in a few fixed steps. Sliding rails with built-in electrical sensors continuously measure the wearer’s actual arm length and feed that information into a digital body model. As a result, the device automatically reshapes its internal geometry to each person, improving comfort and making the robot’s movements more faithful to the human’s intentions. 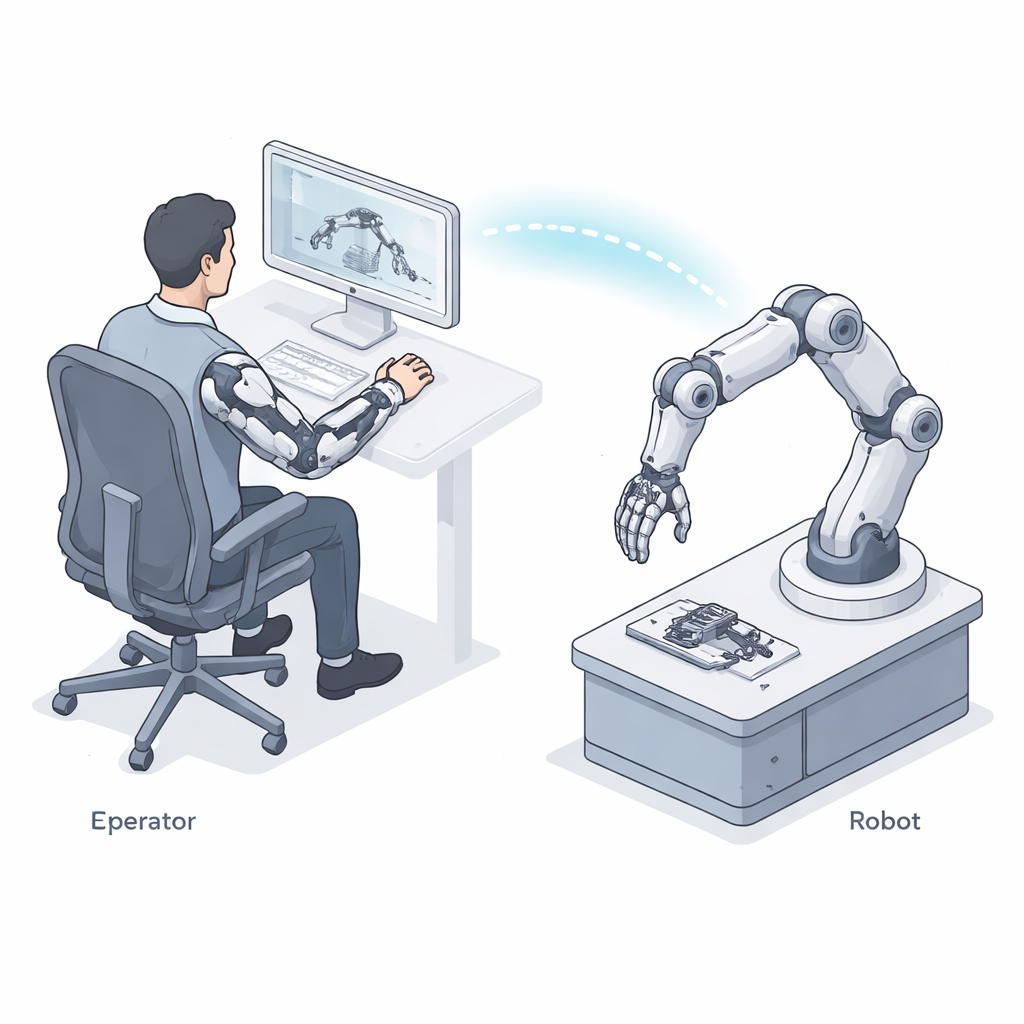
Moving with the body, not against it
Human shoulders don’t just spin like hinges; the shoulder blade also glides across the ribcage. Many exoskeletons ignore this and end up fighting natural motion, causing discomfort. This design adds a passive module with several extra degrees of freedom that quietly follows the subtle shifts of the shoulder and upper body, easing pressure on the skin and joints. At the same time, the powered joints are tuned so their torque—twisting force—stays below safe limits for human tissue. Emergency stops and jam detectors round out the safety features, allowing the system to react quickly if anything goes wrong.
A smarter way to feel contact
Beyond mechanics, the authors focus on what the wearer feels. When the remote robot touches or pushes against something—a wall, a tool handle, or another object—those forces are translated back through the exoskeleton so the user senses resistance. The control system blends two needs that normally clash: accurate tracking of the operator’s motions and gentle, compliant behavior when contact forces grow large. At low forces, the system acts stiff and precise, closely following the wearer’s arm path. As forces rise past a safety threshold, the control automatically softens, allowing some give so that impacts are cushioned rather than jarring. The authors use energy-based mathematical tools to show that this blended behavior remains stable rather than spiraling into oscillations. 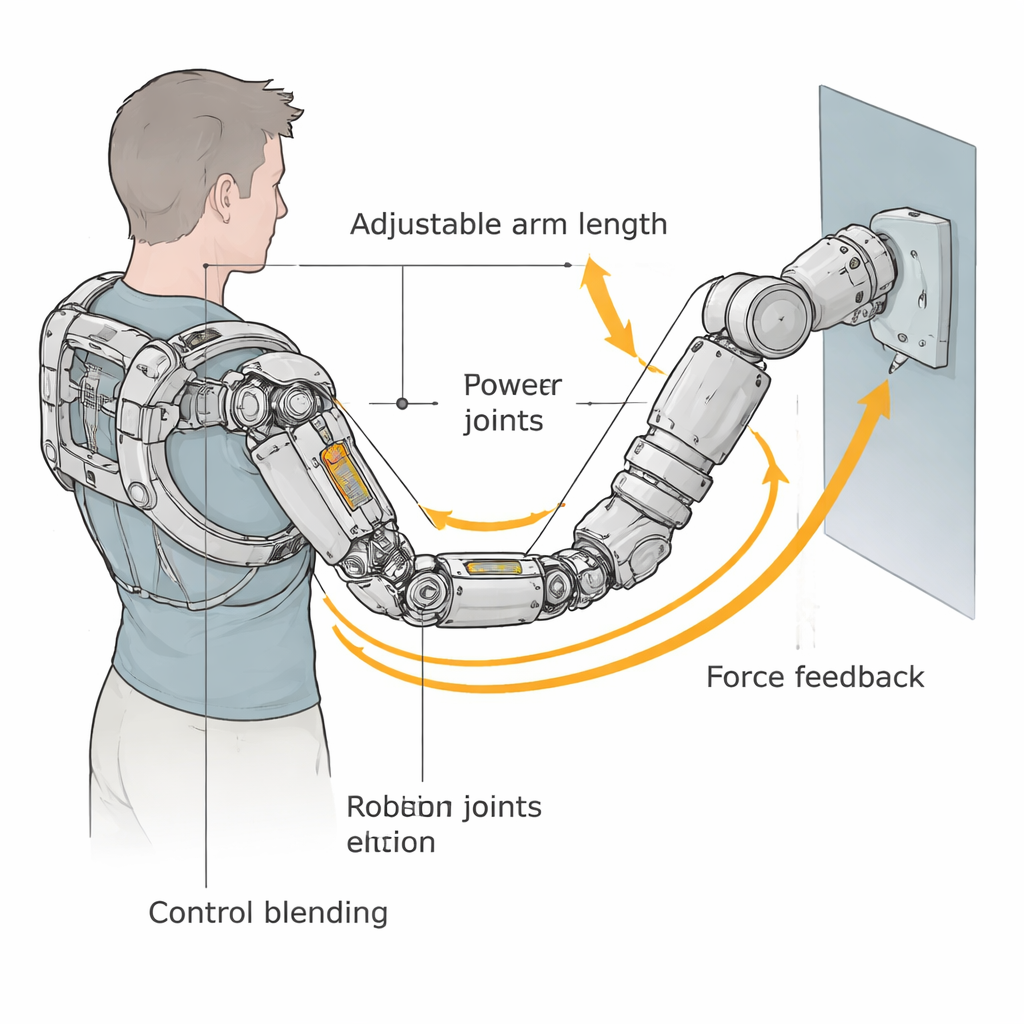
Putting the system to the test
To evaluate the exoskeleton, the researchers connected it to a widely used industrial robot arm. When a person wearing the exoskeleton traced a figure-eight path in the air, the remote robot reproduced the motion closely, despite small communication delays. Additional tests examined how well the arm-length sensing worked: voltage readings from the sliding sensors matched physical measurements with errors of less than a few millimeters, even after repeated donning and doffing. In controlled simulations where the robot pressed against a virtual rigid wall, the full control scheme reduced peak contact forces by nearly 70 percent compared with a basic setup, while largely preserving tracking accuracy in free motion.
What this means for real-world work and care
In everyday terms, this research brings us closer to remote robots that feel as natural and safe to control as moving one’s own arm. By combining a body-hugging adjustable frame, careful tracking of human motion, and smart force feedback that adapts on the fly, the system promises more precise and less tiring teleoperation in hazardous environments. The same technology could also serve patients recovering from stroke, letting therapists guide and record arm movements while patients receive lifelike assistance and feedback. As future versions integrate signals from muscles and eye gaze, and learn from experience, such exoskeleton-robot pairs may become versatile tools for both extreme missions and everyday rehabilitation.
Citation: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
Keywords: teleoperation exoskeleton, robotic arm control, force feedback, rehabilitation robotics, remote hazardous operations