Clear Sky Science · en
Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter
Why smarter robot batteries matter
From warehouse couriers to inspection bots, mobile robots are only as useful as their batteries allow. If a robot misjudges how much energy it has left, it may stall far from a charger, interrupting work and risking damage to its battery. This paper presents a new way for robots to “know” their true battery level in real time and to choose when and how to recharge themselves, so they can work longer, more safely, and with less human supervision.

Robots, busy tasks, and stressed batteries
Unlike electric cars cruising smoothly on highways, many mobile robots face sharp starts, stops, and frequent changes in workload. These jolts cause rapid swings in battery current and voltage, which confuse traditional ways of estimating remaining charge. Simple methods that read battery voltage or just count current over time tend to assume calm, steady conditions and do not track how the battery ages or heats up. As a result, their estimates drift, errors build up, and the robot may either charge too often or push the battery too hard, shortening its life.
A smarter model of what happens inside the battery
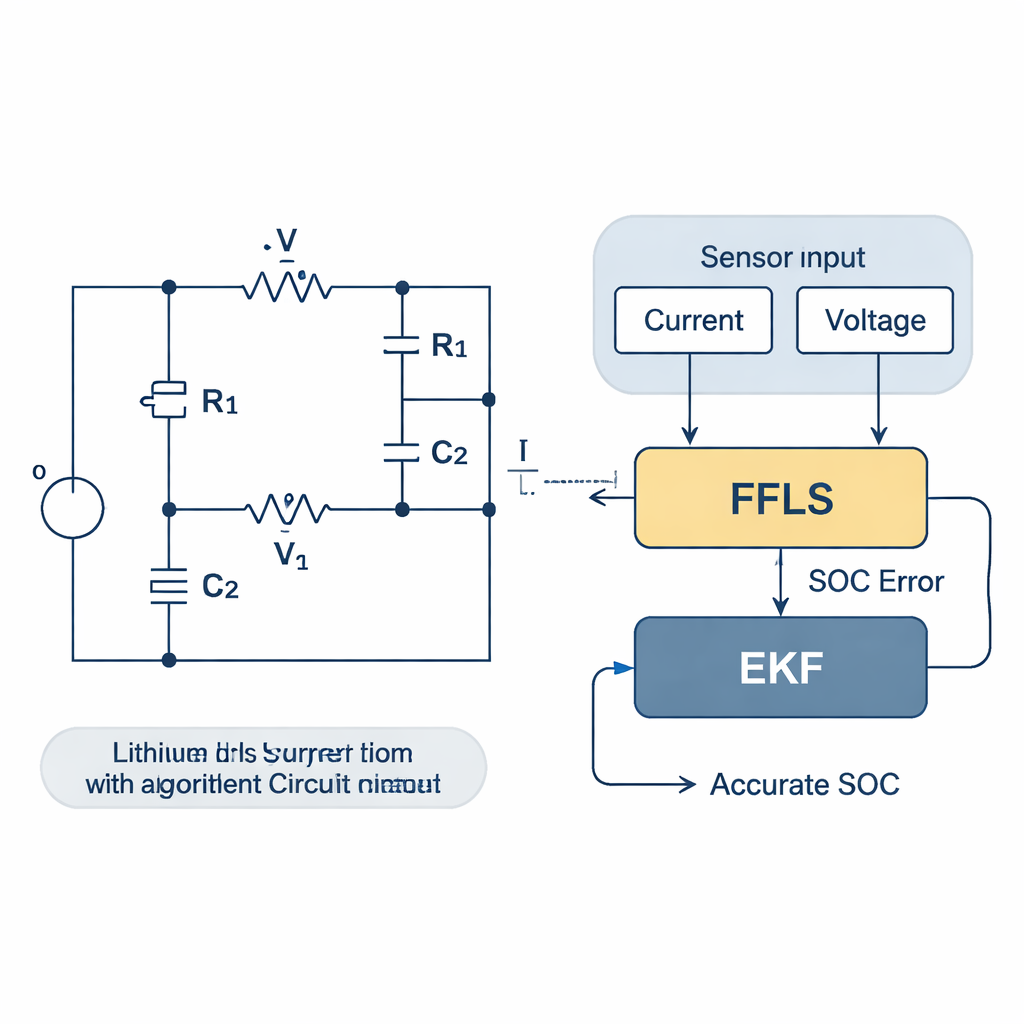
The authors tackle this by giving the robot a more realistic picture of its lithium iron phosphate battery pack. Instead of treating the battery as a black box with a single voltage number, they represent it as an electrical network with internal resistance and two “polarization” branches that mimic how ions move and accumulate inside the cell. This second-order RC model captures fast and slow responses to load changes. The robot continuously measures current and voltage and fits these signals to the model using a least-squares method that includes a “forgetting factor” – a mathematical way to pay more attention to recent data and to fade out outdated history when conditions change.
Letting the algorithm learn and adapt on the fly
On top of this model, the team applies an extended Kalman filter, a widely used tool for tracking hidden states in noisy data. Here, the hidden state is the battery’s true state of charge. As the robot operates, the filter predicts how charge should change based on the model and the measured current, then corrects that prediction using the measured voltage. The forgetting-factor least-squares module keeps updating key model parameters online, so the filter never relies on a stale, factory-calibrated battery description. Cleverly, the researchers also exploit a link between internal resistance and a quantity called polarization capacitance: as temperature rises, resistance falls and capacitance grows. By watching both together, the system can infer temperature effects without any physical temperature sensor and adjust the model accordingly.
Teaching robots when and how to recharge
Accurate charge estimates are only half the story; the other half is how the robot uses them. The authors design an autonomous charging strategy that avoids both constant “topping up” and deep discharges. They define upper and lower charge limits: if the battery falls below a threshold, the robot prioritizes returning to a dock; if it is already near the upper limit, it postpones charging and keeps working. Within the safe range, the robot recharges during idle moments. The system also watches each cell in the battery pack and balances their charge so that no cell is overfilled while others lag behind, a key step in preventing premature aging. To make docking efficient, the robot combines room-level navigation with short-range infrared guidance, shortening routes and docking time.
Longer-lasting, more reliable robot power
In tests using public battery datasets, simulations, and real robots, the new method estimated state of charge with about 98% accuracy, clearly outperforming several advanced alternatives based on particle filters, neural networks, and Transformers. Batteries managed with this approach kept their charge better over weeks of simulated use and survived 15–40% more charge–discharge cycles than with competing methods. Internal resistance grew more slowly, an indicator of healthier cells, and robots spent less time docked while maintaining higher battery health. For a layperson, the takeaway is that this technique lets robots become better “caretakers” of their own batteries: they can judge their energy more precisely, choose smarter moments to recharge, and quietly stretch the working life of costly battery packs without extra sensors or heavy computing power.
Citation: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
Keywords: mobile robots, battery state of charge, autonomous charging, extended Kalman filter, lithium iron phosphate batteries