Clear Sky Science · en
Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling
Why warehouse robots need better timing
Online shopping has filled warehouses with goods that must be moved quickly, safely, and around the clock. Many facilities now rely on fleets of floor robots—Automated Guided Vehicles, or AGVs—to shuttle shelves and pallets. But if these robots are scheduled using oversimplified assumptions about how they move, they can waste time, jostle fragile packages, or even risk collisions. This paper presents a new way to plan and coordinate many AGVs at once by taking their real physical behavior into account, promising smoother traffic and safer cargo in busy warehouses.
Robots that move goods, not just numbers
Modern AGVs already crisscross warehouses, airports, and factories, towing carts or lifting shelves and pallets. Most existing software that manages these fleets works on a high level: it decides which robot should handle which job and roughly which route it should take. To simplify the math, it usually assumes that travel time between two points is fixed, ignoring how fast a robot can actually speed up or slow down, or how heavy its load is. The authors show that this shortcut creates problems in real buildings. Robots may arrive at intersections earlier or later than expected, increasing the chance of gridlock, near-misses, or sudden braking that shakes whatever they are carrying.
Adding real-world physics to the schedule
The researchers tackle this gap with a two-stage approach that blends physics with scheduling. First, they design a Dynamic Traveling Time estimator for AGVs, called DTT-AGV. Instead of treating a corridor as a single chunk of time, DTT-AGV breaks each move into phases: speeding up, cruising at steady speed, and slowing down. It uses a simple mechanical model of an AGV carrying a shelf, where the shelf behaves like a mass attached by springs and dampers. This model captures how acceleration and deceleration can make loads sway or vibrate. From this, the algorithm computes how fast the vehicle can safely move for a given distance and load without exceeding limits on speed, force, or vibration, and returns a realistic travel time for each segment of the path.
Keeping robots from meeting nose-to-nose
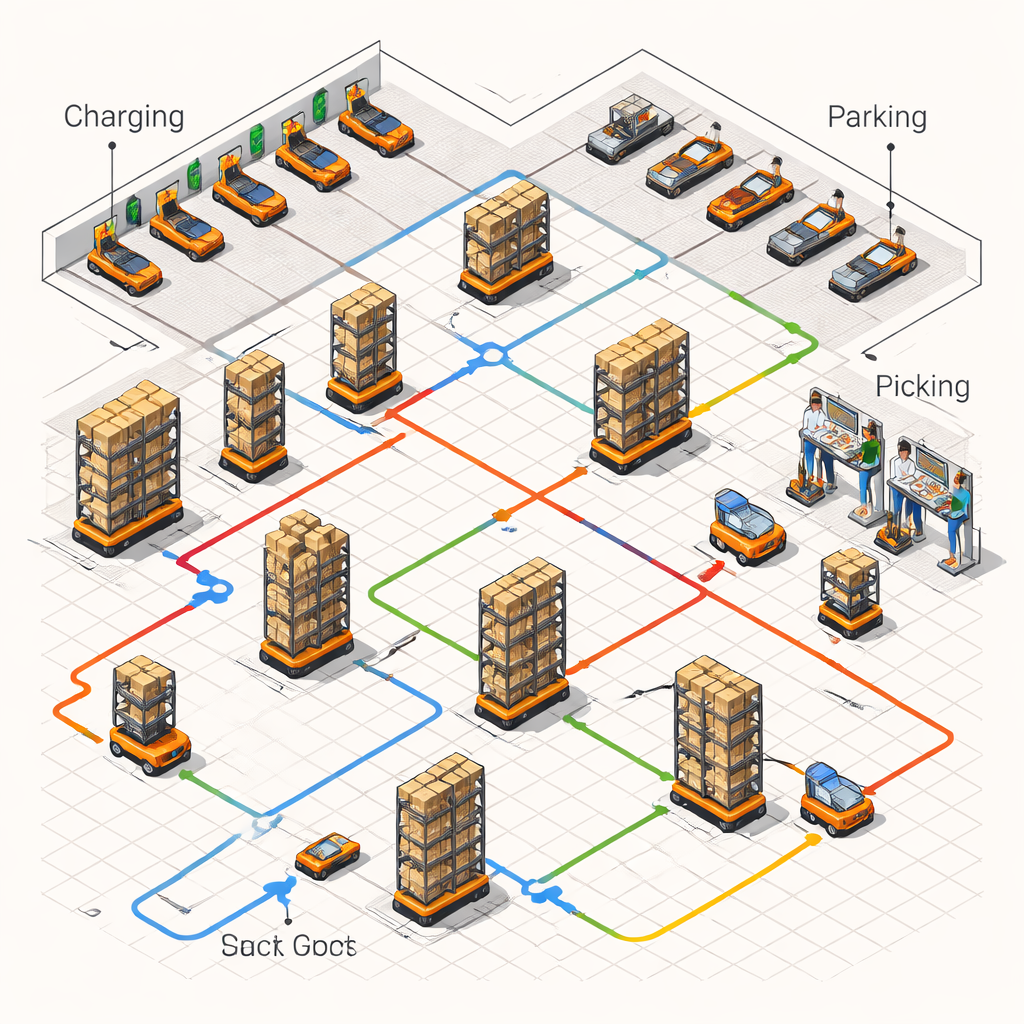
Second, the team introduces an Arrival Time Chaining method, ATC-AGV, that coordinates many robots on shared paths. Once DTT-AGV has estimated how long each segment will take, ATC-AGV assigns precise arrival and departure times at every node—intersections, turns, or transfer points—along each robot’s route. It builds a time “chain” at every shared node, ensuring a safe gap between vehicles while accounting for current robot states, such as whether they are loaded, charging, or turning. If a new plan would cause two AGVs to occupy the same node too closely in time, ATC-AGV shifts one robot’s schedule just enough to restore the safety margin. In effect, it turns the floor grid of the warehouse into a time-aware map that helps prevent collisions before they can arise.
Testing smoother motion and gentler rides
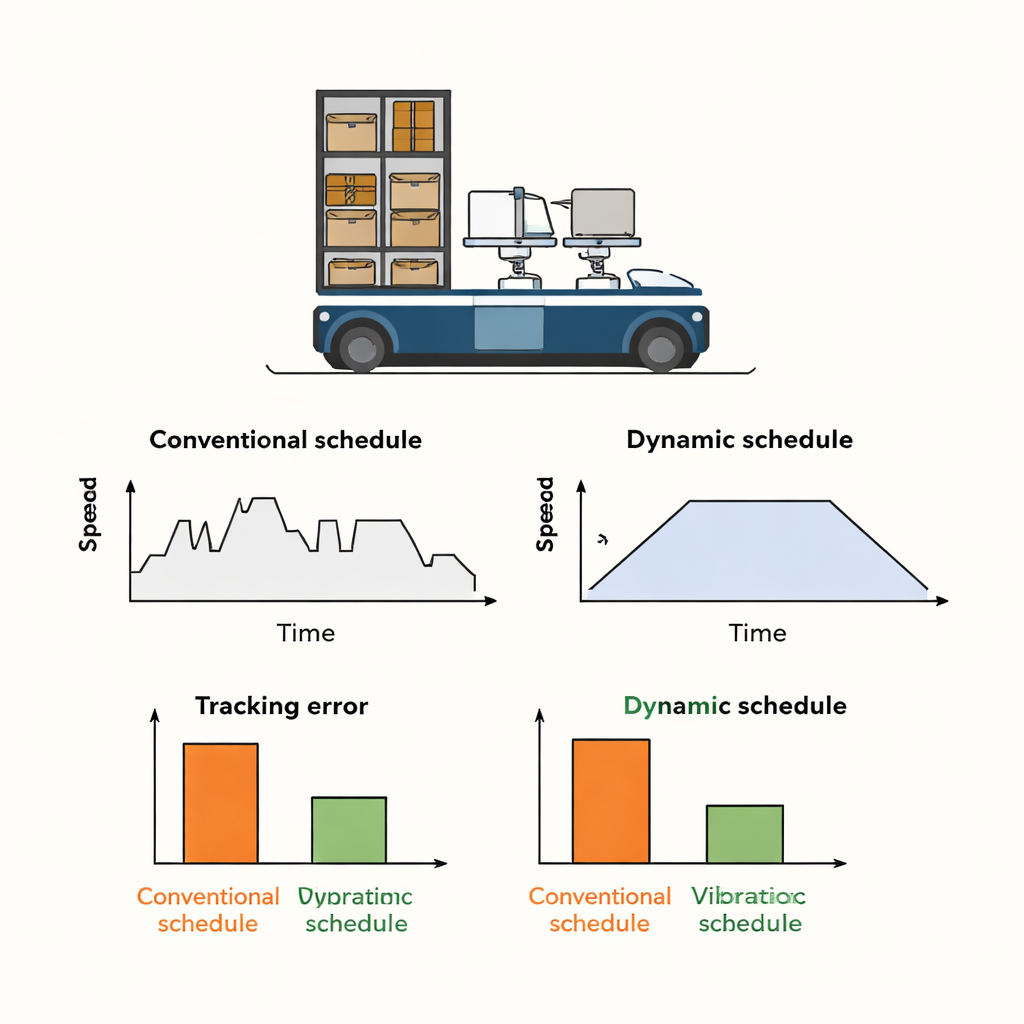
To test their ideas, the authors simulate AGVs in a grid-style cross-docking warehouse that includes charging areas, parking spots, and shelf zones. They compare their planner against a conventional method that assumes nearly constant speed and ignores detailed motion phases. In one test, a robot travels along an L-shaped path, then turns 90 degrees. The traditional approach generates sharp changes in speed at the corner, which the real robot cannot follow perfectly. The result is large tracking errors—differences between where the robot should be and where it actually is—and spikes in timing error at key points. With the new planner, the path is split into clear acceleration, cruise, and braking phases. The simulated robot now tracks its target path closely, with much smaller errors and smoother turns.
Softer on packages and future-proofed
The second set of tests focuses on how the load itself behaves. When the conventional schedule is used, the base of the robot experiences sudden jolts in acceleration that excite the shelf’s spring-like behavior, causing strong vibrations in the cargo. With the dynamic, load-aware schedule, accelerations stay within a narrower band and change more gently. Measured over time, both the peak and average vibrations of the load drop sharply, which is critical for fragile, stacked, or unstable items. The authors also probe how neglected factors like wheel-floor friction might affect their estimates and find that, under typical warehouse conditions, the added timing error stays within the safety buffers built into their algorithm.
What this means for real warehouses
In simple terms, this work teaches AGV schedulers to respect the real motion of the machines they control. By basing travel times and right-of-way decisions on how quickly robots can truly speed up, slow down, and carry different loads without shaking them apart, the proposed framework cuts path-following errors, lowers cargo vibration, and reduces the risk of conflicts at intersections. For warehouse operators and manufacturers, that translates into smoother traffic, safer handling of goods, and a foundation that can scale as fleets grow larger and layouts become more complex.
Citation: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
Keywords: automated guided vehicles, warehouse robotics, collision-free scheduling, motion planning, smart logistics