Clear Sky Science · en
Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties
Why sticking drones to walls matters
Imagine a tiny drone that doesn’t just hover until its battery dies, but can quietly land on a wall like a bird, then sit there for hours watching a bridge, a crop field, or a forest edge. This paper presents a new way to control such “perching” drones so they can fly up to a vertical surface, make contact without bouncing off, and cling there stably even when the air is turbulent or the drone’s behavior is not perfectly known. The work tackles the challenge of turning a fragile flying machine into a reliable, energy‑saving inspection tool.
From hovering robots to wall‑clinging scouts
Small four‑rotor drones, or quadrotors, are already used for mapping, construction inspection, wildlife monitoring, and precision farming. Yet their biggest limitation is endurance: hovering eats battery power. Perching on a surface—such as a wall, pole, or underside of a bridge—allows a drone to shut down most of its motors while keeping its sensors in place for long‑term observation. Doing this safely is far from trivial. During the short but critical perching maneuver, the drone must approach the wall, touch it, and rotate into a nose‑down pose without rebounding, sliding, or losing control when unexpected gusts or modeling errors disturb its motion.
The challenge of a clean wall landing
The authors study a quadrotor equipped with a light support arm on its front, which acts as the physical contact point with the wall. As the drone transitions from free flight to contact, its position (sideways, forward, up‑down) and its attitude (roll, pitch, yaw angles) are tightly coupled: changing orientation alters how thrust translates into motion, and the sudden reaction force from the wall can twist the drone’s body. On top of this, real‑world effects—like aerodynamic interactions near the wall, small construction inaccuracies, and sensor noise—act as unknown disturbances. Existing robust control techniques can keep drones stable, but they often cause high‑frequency “chattering” in the motor commands, wear out hardware, and only guarantee that errors shrink gradually rather than within a predictable, short time window.
A smarter way to balance and adapt
To overcome these issues, the paper introduces an adaptive second‑order continuous control (ASOCC) scheme. In simple terms, the controller looks not only at how far the drone’s motion is from its target, but also at how quickly that error is changing, and shapes its commands so that both settle to zero in a finite time. A built‑in disturbance observer acts like a real‑time “noise listener,” estimating the net effect of unknown forces and model mismatches and feeding that information back into the control law. Crucially, the gains that determine how strongly the controller reacts are adjusted on the fly based on these estimates, rather than being fixed in advance. Because the control signals change smoothly instead of switching abruptly, the design greatly reduces chattering while still retaining strong robustness.
Putting the new control to the test
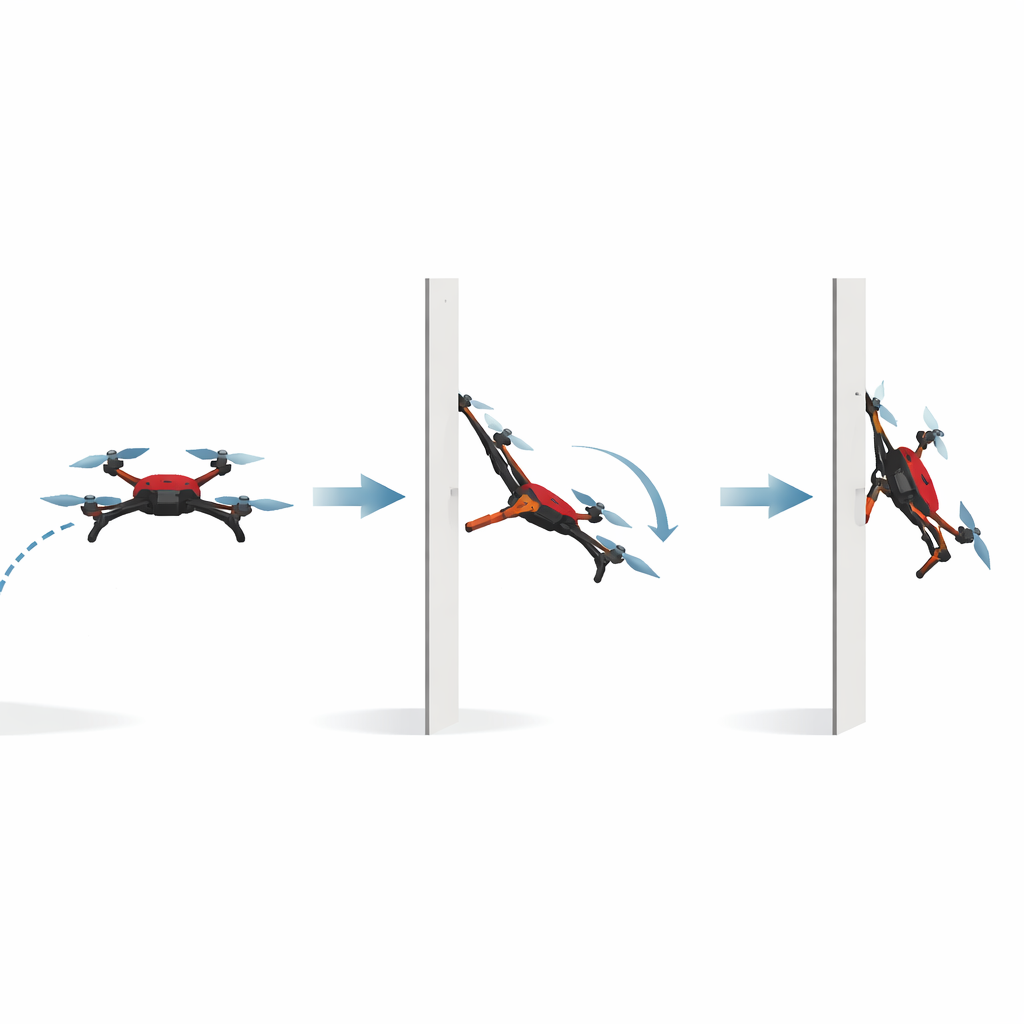
The researchers first analyze the mathematics of their observer‑controller pair and prove, using energy‑like Lyapunov functions, that all motion errors converge to zero within a finite time despite bounded disturbances. They then simulate aggressive perching scenarios in software, subjecting the drone model to wind‑like forces, random measurement noise, and intentional errors in its physical parameters. In these trials, ASOCC guided the drone through three stages—staging, approaching, and perching—while keeping position and orientation errors small and control inputs smooth. When compared against several advanced alternatives, including popular sliding‑mode and model‑based controllers, the new method cut key tracking error measures by roughly 35–55 percent.
From simulation to a real drone on a wall
Moving beyond simulations, the team built a miniature perching quadrotor using a commercial flight board and a 3D‑printed frame with a front arm. In indoor experiments, the drone autonomously flew toward an inclined wall, rose to about one meter, then pitched nose‑down to make contact and remain attached. Time‑series data show that altitude, horizontal position, and pitch angle all follow their desired paths closely, with only small ripples from sensor noise. Despite low‑cost hardware, communication delays, and actuator limits, the drone did not bounce off or oscillate after impact, demonstrating that ASOCC can handle the messy realities of flight.
What this means for future flying inspectors
For non‑experts, the key outcome is straightforward: this work delivers a control strategy that lets small drones reliably stick to vertical surfaces and stay there, even when conditions are imperfect. By combining smooth yet strongly corrective control with an adaptive disturbance observer, the method enables fast, precise perching without the jitter and hardware stress seen in many robust controllers. This opens the door to long‑duration aerial monitoring with lighter batteries, simpler platforms, and greater safety—an important step toward fleets of autonomous “wall‑clinging” robots that quietly watch over infrastructure, crops, and natural environments.
Citation: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
Keywords: quadrotor perching, adaptive control, drone inspection, disturbance observer, aerial robotics