Clear Sky Science · en
Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards
Robots That Help Nurses, Not Replace Them
Hospitals around the world are under pressure: more elderly patients, more chronic illness, and staff who are stretched to their limits. This study describes a smart patient-care robot designed not to take over nursing, but to quietly handle repetitive monitoring and nighttime checks in hospital wards. By moving safely and reliably on its own, this robot could help nurses spot emergencies sooner—like falls or sudden fevers—while easing their workload and reducing the risk of accidents in crowded hallways and tight doorways.
Why Hospital Hallways Are Hard for Robots
At first glance, a hospital corridor looks simple: straight lines, clean floors, regular doors. For a robot, it is anything but. Beds, carts, walls, and especially narrow doorframes create tight spaces where even a small error can lead to a collision. Many existing hospital robots rely on a bundle of sensors and complex hardware to cope with this. The team behind this study took a different path: they set out to make a robot that can move safely using just one main sensor—a two-dimensional laser scanner that measures distances around it—and a smarter way of planning routes.

Building a Nurse’s Extra Pair of Eyes
The researchers developed a smart patient-care robot (SPCR) on top of a commercial wheeled base. On its body, they mounted a 3D camera for spotting falls and reading vital signs without touching the patient, and a 2D laser sensor on top to continuously scan the surroundings in a full circle. Inside the robot sits an embedded computer, batteries, motor controllers, and communication electronics that let it talk to a control app and manage its own driving decisions. The robot can move in all directions, bend a camera arm to look at patients, and is designed to operate for several hours at a time in real hospital conditions.
A Smarter Map Instead of More Hardware
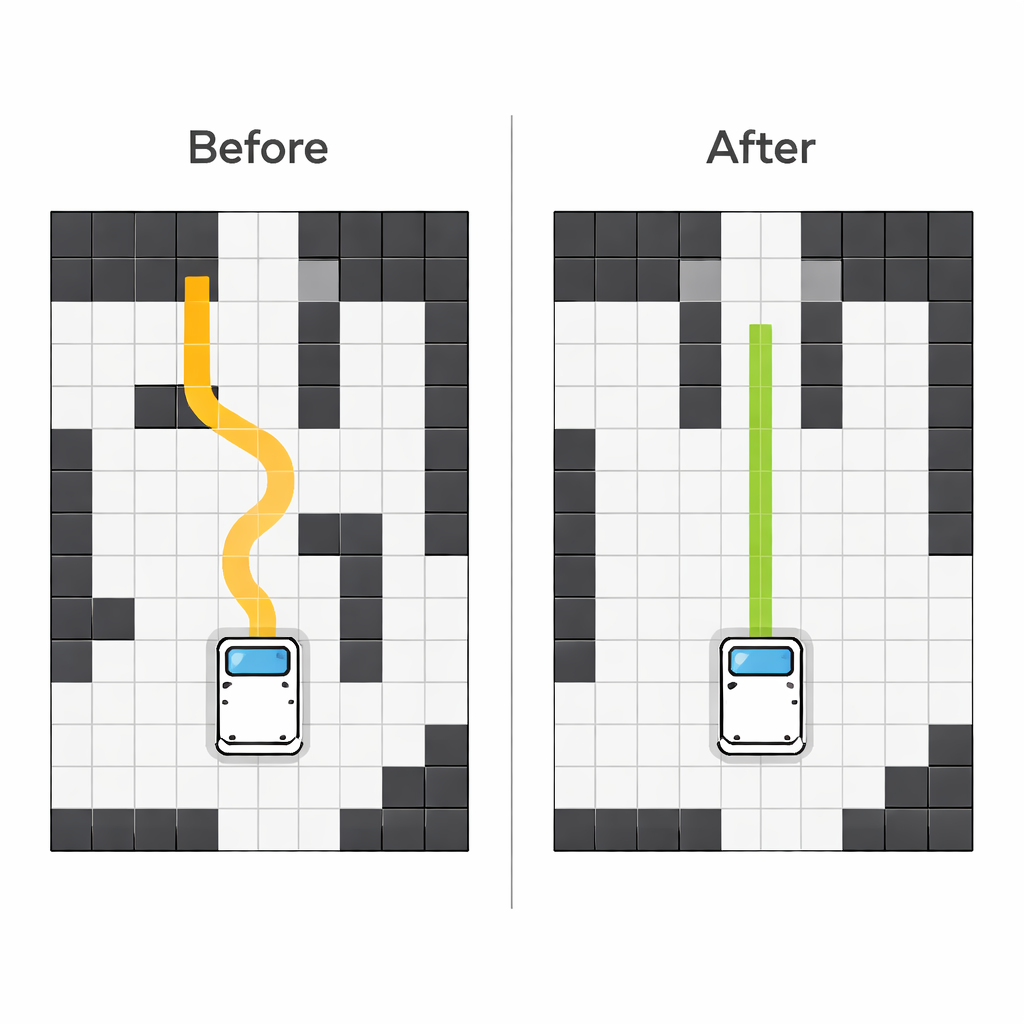
To navigate, the robot first needs a map that marks where it can and cannot go. The team started from precise drawings of a hospital hallway and converted them into a grid-style map, where each tiny square is labeled as free space, wall, or obstacle. Instead of leaving the map as-is, they reshaped it to be more cautious than reality. They introduced “virtual obstacle spaces”—extra blocked-out areas that gently push the robot away from risky spots such as door edges and tight corners. The path-planning software, based on an improved version of the D* Lite algorithm, then searches this safer map for routes that avoid sharp turns and keep the robot closer to the center of narrow passages.
Putting the Robot to the Test in Real Wards
The system was tested in an actual hospital corridor divided into three sections with different combinations of hallways, doors, and obstacles. The robot had to travel between checkpoints, pass through standard 90-centimeter-wide doors, and avoid walls and fixed objects. Because the robot itself is about 76 centimeters wide, it had only a few centimeters of clearance on either side when going through doorways—conditions where many robots struggle. By comparing performance before and after adjusting the grid map, the researchers found that the robot’s success rate at finishing its routes without touching anything jumped by more than 30 percent in all sections, with smoother paths and fewer unnecessary maneuvers.
What This Means for Future Patient Care
For non-specialists, the key message is simple: instead of loading robots with ever more sensors, this study shows that careful digital map design and smarter route planning can make hospital robots both safer and more practical. A robot that can reliably slip through narrow doors at night, follow efficient paths, and quietly check on patients’ basic signs could free nurses to focus on human care—comforting families, making complex decisions, and handling emergencies. The authors see this work as a foundation: future versions will add more sensors and richer patient-monitoring features, aiming toward reliable round-the-clock robotic assistants that move safely in real hospital environments.
Citation: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
Keywords: hospital robots, autonomous navigation, patient monitoring, LiDAR mapping, path planning