On the seafloor, autonomous underwater vehicles act as our eyes and ears for climate research, infrastructure inspection, and search-and-rescue. Yet these robot submarines struggle with a basic problem: talking and thinking clearly in a harsh environment where signals are slow, noisy, and energy is scarce. This paper introduces a new way to help underwater robots communicate, spot objects, and stay secure by combining augmented and virtual reality with a branch of artificial intelligence called reinforcement learning.
Why underwater communication is so hard
Sending data underwater is far tougher than sending it through air. Radio waves, which power Wi‑Fi and 5G, are quickly absorbed by seawater. Acoustic (sound-based) signals travel farther but offer very low data rates and can be delayed, echoed, or distorted. Magnetic induction works only over tens of meters. Existing control systems for underwater robots often treat these channels separately and use fixed rules for navigation and sensing. That makes them slow to adapt when conditions change, wastes battery power, and leaves communication links open to eavesdropping or attack.
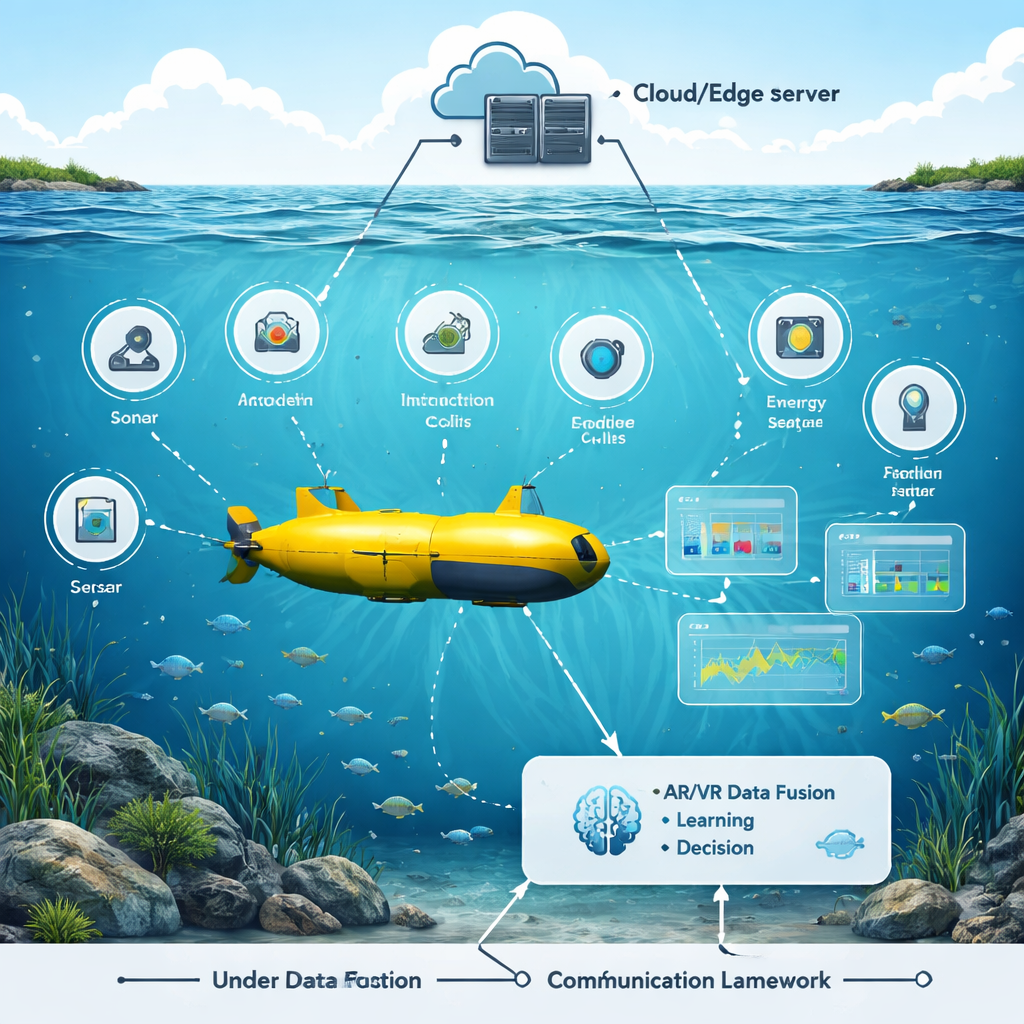
A virtual ocean to train better instincts Figure 1.
The authors built an augmented and virtual reality testbed that recreates a busy underwater world: moving fish, rocks, boats, and buoys, along with realistic noise and signal loss in the water. A simulated underwater vehicle cruises through this environment using many sensors—sonar, cameras, acoustic modems, energy meters, and position trackers. In the virtual scene, researchers can slide controls to change object positions, water conditions, and sensor settings, and immediately see how the robot responds. This AR/VR layer is not just eye candy; it merges raw sensor feeds into a unified 3D picture that is easier for an AI system to understand and act on.
Teaching the robot to learn from experience
At the heart of the framework is an AI strategy the authors call Adaptive Augmented Reality and Reinforcement Learning Scheduling Strategy (AARLSS). Instead of following a fixed script, the robot learns by trial and error in the virtual ocean. Every moment, it observes its fused sensor state, chooses an action (such as changing course, adjusting sensor sampling rate, or switching between short- and long-range communications), and receives a reward. That reward balances four goals: saving energy, reducing delay, lowering security risk, and using fewer computing and network resources. A deep Q‑learning network stores and updates the expected value of different decisions, using mini-batches of past experiences kept in a replay memory so the robot can learn from both recent and older situations.
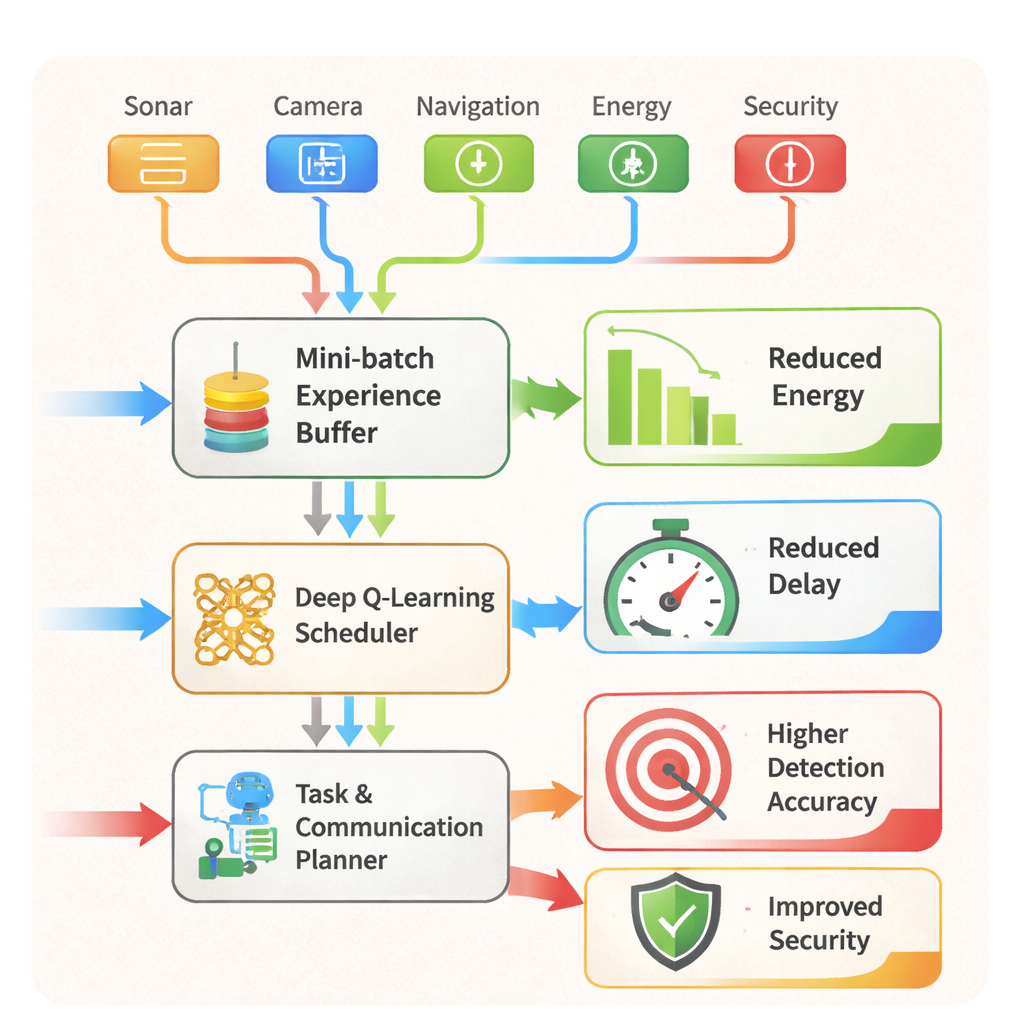
From smart scheduling to safer missions Figure 2.
AARLSS also acts as a real-time scheduler. It decides which tasks—navigation, object detection, communication, or security checks—should run where and when, and whether data should be processed on the robot, offloaded to an edge server, or delayed. On top of this, a built‑in intrusion detection system continually scans patterns in sensor and network data to flag anomalies that might signal an attack or malfunction, and it can trigger protective actions such as blocking risky links or forcing local-only computation. In tests within the AR/VR simulator, the framework outperformed several established reinforcement-learning methods. It cut the underwater vehicle’s energy use by about 20%, reduced communication and task delays by around 18–20%, and pushed object-detection accuracy to roughly 97–98%, even during complex maneuvers and in cluttered scenes.
What this means for real-world oceans
For non-specialists, the key message is that this research points toward underwater robots that are more independent, efficient, and trustworthy. By training in a rich virtual ocean and learning to juggle energy, time, accuracy, and security all at once, AARLSS allows a vehicle to choose when to speak, when to listen, and when to stay quiet to save power—all while keeping a sharp eye on its surroundings and guarding its data. Although these results come from a sophisticated simulator rather than open water, they suggest that future fleets of underwater robots could handle longer, safer, and more data-rich missions with less human oversight, improving everything from marine science to offshore industry inspections.
Citation: Lakhan, A., Mohammed, M.A., Ghani, M.K.A. et al. A novel augmented reality and reinforcement learning empowered communication framework for underwater unmanned autonomous vehicle.
Sci Rep16, 6241 (2026). https://doi.org/10.1038/s41598-026-36647-3