Clear Sky Science · en
An improved black-winged kite algorithm for solving non-lethal kinetic strike parameters for moving targets
Safer tools for crowd control
Modern armies and police units are under pressure to control dangerous situations without causing needless deaths. Rubber bullets and other so‑called “non‑lethal” weapons are meant to stop people temporarily, yet headlines show that they can still blind or kill. This paper tackles a very practical question: how can we choose the way these weapons are fired so that they stop a moving person quickly, but keep the risk of severe injury as low as possible?
Why the right shot matters
Once a projectile leaves the barrel of an unguided weapon, its path is fixed by the firing settings: muzzle speed, elevation, and sideways angle. For non‑lethal weapons, small errors in those settings can mean the difference between a bruise and a life‑threatening wound, especially when people are running, ducking, or moving behind cover. Traditional firing tables and step‑by‑step numerical solvers can compute these settings, but they are often slow, inflexible, and tuned for long‑range lethal weapons rather than short‑range crowd‑control tools. The authors recast the problem as an optimization task: among all possible firing settings, find those that hit a moving target within a small tolerance, reach the target fast, and deliver an impact that is strong enough to disable but unlikely to kill.
Turning moving targets into a geometry puzzle
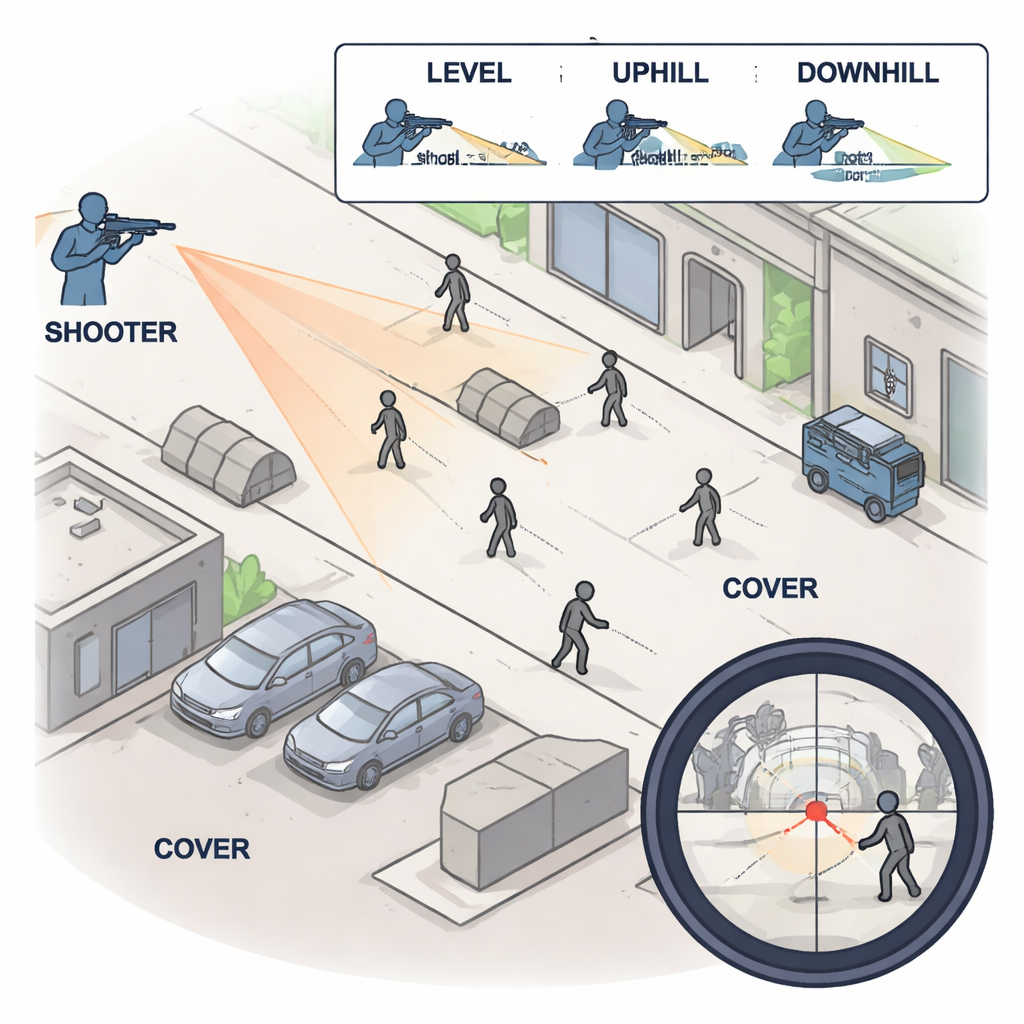
To mirror real operations, the team builds a three‑dimensional “hit triangle” model. One corner is the shooter, one is the target’s position when the shot is fired, and the third is where the target will be when the projectile arrives. The three edges represent the projectile’s flight, the target’s motion, and the final line of impact. Around the target they draw a small sphere that defines an acceptable miss distance, and they bound how far the target can move before striking. The underlying physics uses a streamlined ballistic model that accounts for gravity and air drag but ignores effects that matter mainly for long‑range artillery. On top of this, the authors impose limits on muzzle velocity, elevation, and deflection angle, require that the projectile must not strike the ground first, and combine everything into a single score that reflects hit accuracy, terminal speed, and how far the target manages to run before being stopped.
Defining what “non‑lethal” really means
Computing precise firing settings is pointless unless we also know what level of impact is acceptable. Drawing on decades of medical reports from conflicts and riots, the authors show that hits to the head, neck, and chest account for most deaths and devastating injuries from rubber bullets. In contrast, hits to limbs and the abdomen are far more likely to produce temporary pain and loss of mobility without fatal complications. They therefore treat limbs and abdomen as preferred aiming zones and rule out areas such as the head, chest, spine, and groin. They then analyze test data for an 18.4‑millimetre rubber projectile widely used in China, linking its speed at various ranges to a quantity called specific kinetic energy (energy per unit impact area) and to a “bluntness” measure that also depends on body size and tissue thickness. Using body measurements for Chinese adults of different ages and sexes, they derive curves that relate impact speed to injury severity and select a terminal speed—about 80 metres per second—that is high enough to stop most adults but statistically associated with only mild injuries.
Nature‑inspired computing for split‑second choices
Finding the best combination of muzzle speed and angles under all these conditions is a demanding search problem. The authors start from the recently proposed Black‑winged Kite Algorithm, a metaheuristic that imitates how small birds hover, dive, and migrate while hunting. They strengthen it into an “improved BKA” (IBKA) with four ideas. First, they use a Hammersley sequence to seed the initial swarm of candidate solutions more evenly across the search space. Second, they borrow an avoidance behaviour from another animal‑inspired method so that the virtual “birds” can escape poor regions instead of clustering too early. Third, they replace the original random jumps with Lévy flights, a pattern of many short moves and occasional long leaps known to explore complex landscapes efficiently. Finally, they add a triangular mutation step that nudges solutions within a triangle formed by the best, second‑best, and worst candidates, sharpening local refinement while keeping diversity.
Testing the algorithm and its real‑world impact
The researchers first benchmark IBKA on a demanding international test set of 29 mathematical functions that represent smooth, rugged, mixed, and composite landscapes. Compared with seven popular rival algorithms—including particle swarm optimization and several newer animal‑inspired methods—IBKA finds better solutions in about four out of five test cases and shows faster, more reliable convergence. They then feed the non‑lethal ballistics model into all the algorithms and simulate three realistic firing situations: level shots at a fast target far away, upward shots at a fast nearby target, and downward shots at a slower distant target. In all three settings, IBKA consistently computes firing parameters that hit the moving target with the smallest positional error, keep the projectile’s terminal speed closest to the chosen non‑lethal value, and do so with high repeatability. Its solutions also produce the highest rates of successful hits without ground impact in repeated trials, a key requirement for any future fire‑control system.
What this means for future crowd‑control weapons
For non‑lethal weapons to live up to their name, they must be paired with clear medical limits and fast, reliable computation of how to fire within those limits. This study shows how both pieces can be built: by grounding “acceptable” impact in human injury data and body measurements, and by using a carefully tuned nature‑inspired algorithm to search the space of firing options in real time. If embedded into smart sights and fire‑control units, approaches like IBKA could help human operators select shots that are more likely to stop a moving person quickly while greatly reducing the risk of permanent harm. The authors stress that such systems must remain under human oversight and within legal and ethical boundaries, but argue that better science and computing can make the unavoidable use of force meaningfully safer.
Citation: Li, Y., Gu, T. & Wan, Q. An improved black-winged kite algorithm for solving non-lethal kinetic strike parameters for moving targets. Sci Rep 16, 6257 (2026). https://doi.org/10.1038/s41598-026-36642-8
Keywords: non-lethal weapons, ballistics, optimization algorithm, rubber bullets, fire control systems