Clear Sky Science · en
Reinforcement learning-driven model predictive control for optimizing counter-rotating permanent magnet synchronous motor in submarine propulsion system
Smarter Motors for Stealthier Submarines
Modern submarines rely on quiet, efficient propulsion to explore the oceans and carry out scientific, commercial, or defense missions. This study looks at a special kind of electric motor that spins two propellers in opposite directions, helping a submarine move smoothly and silently through the water. The researchers show how blending advanced prediction tools with a learning algorithm can keep these motors stable and efficient, even when waves, currents, and sudden maneuvers disturb them.
Two Propellers, One Stable Submarine
Traditional single-propeller systems can cause a submarine to twist and roll, especially at high speeds, making it harder to steer and easier to detect. To avoid this, engineers use counter-rotating propeller systems: two propellers mounted on the same shaft but spinning in opposite directions. At the heart of this setup is the counter-rotating permanent magnet synchronous motor (CRPMSM), which is essentially two compact, high-torque electric motors stacked together. This arrangement cancels out unwanted twisting forces, improves energy use, and reduces noise, all of which are vital for stealth and long missions beneath the waves. However, when the load on the two rotors becomes unbalanced, such as in turbulent water or sharp turns, keeping both sides spinning in perfect harmony becomes a serious control challenge. 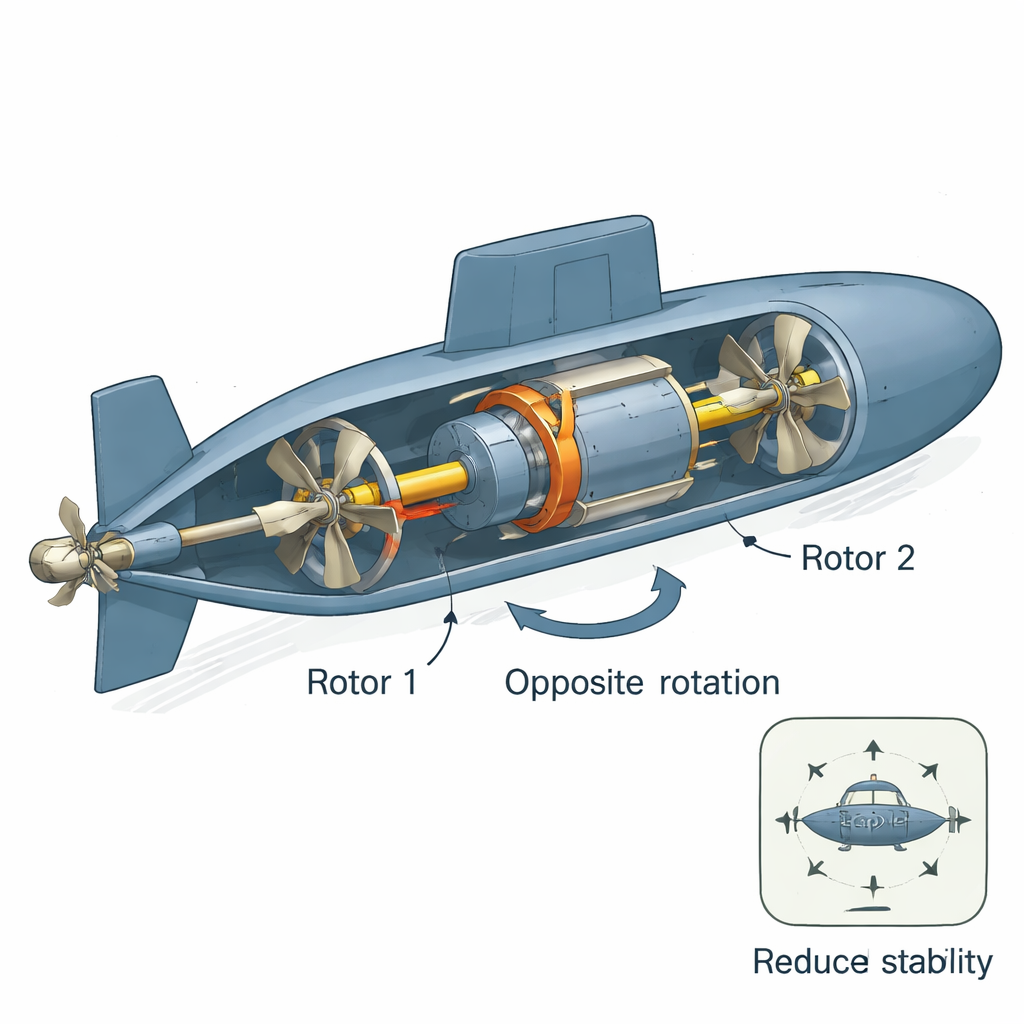
Why Conventional Control Falls Short
Engineers have tried many control strategies to keep CRPMSM rotors synchronized and efficient. Methods like field-oriented control and direct torque control can work well under calm, predictable conditions, but they struggle when the underwater environment changes quickly or becomes highly uneven. More sophisticated techniques such as sliding-mode, fuzzy, and adaptive control improve robustness, yet they often rely on highly accurate mathematical models of the motor and the surrounding water. In practice, those models are never perfect, and mismatches can lead to increased torque ripple, slower recovery after disturbances, and wasted energy. Model Predictive Control (MPC), which plans optimal control moves over a short future window, offers fast response but is still tied tightly to the quality of the underlying model.
A Hybrid Controller That Learns on the Job
The authors propose a hybrid Reinforcement Learning-driven Model Predictive Control (RL-MPC) framework that combines the strengths of both approaches. MPC uses a mathematical model of the CRPMSM to predict how currents, torque, and speed will evolve over the next few control steps and chooses voltage commands that should track the desired speed and current targets while respecting limits. On top of this, a reinforcement learning agent based on the Twin Delayed Deep Deterministic Policy Gradient (TD3) algorithm observes how the real motor behaves. By receiving rewards when speed errors, current errors, and control effort are small, the learning agent gradually adjusts the MPC outputs to compensate for modeling errors, unbalanced loads, and external disturbances. A space-vector pulse-width modulation stage then converts these optimized voltage commands into switching signals for the inverter that drives the motor.
Putting the Smart Motor to the Test
To evaluate their approach, the researchers built a detailed simulation of a 120 kW counter-rotating motor system in MATLAB/Simulink and tested it under three realistic operating scenarios. In the first, the motor ran at constant speed while the load on both rotors changed but remained balanced; in the second, speed was varied under constant load; in the third, the most demanding case, the rotors experienced different loads while the speed setpoint was fixed. In every case, RL-MPC was compared directly with conventional MPC using the same prediction and control horizons. 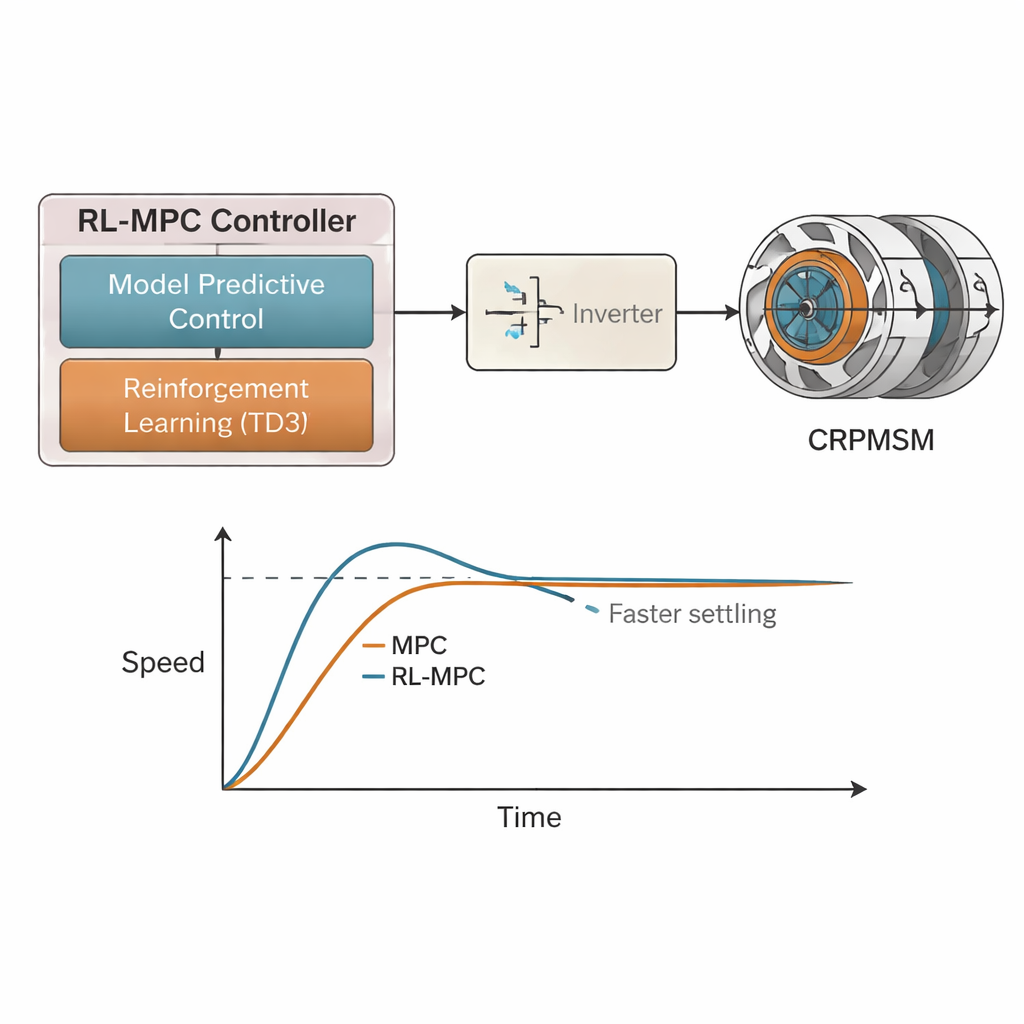
Faster Response, Cleaner Currents, Better Synchronization
The hybrid RL-MPC controller consistently outperformed standard MPC across all tests. When loads or speeds changed suddenly, RL-MPC cut the overshoot in speed from about 30% to around 15–16.6% and halved the settling time from roughly 1.4 seconds to 0.7 seconds. Torque ripples were smaller, and the two contra-rotating rotors stayed closely synchronized, even when one rotor was loaded more heavily than the other. Just as important, the quality of the stator currents improved markedly: total harmonic distortion fell by more than 60% during harsh unbalanced-load transients, dropping from 9.3% for MPC to 3.4% for RL-MPC, and to as low as about 2–3% in steady state. Cleaner currents mean less heating, quieter operation, and higher overall efficiency.
What This Means for Future Underwater Vehicles
For a non-specialist, the core message is that adding a learning layer on top of a predictive controller makes submarine motors both smarter and tougher. Instead of relying solely on fixed equations that may fail when the sea becomes rough or the vehicle maneuvers sharply, the RL-MPC framework can adapt on the fly, keeping the dual-rotor motor synchronized, responsive, and efficient. While the results so far are based on simulation and will need to be validated in real hardware and real oceans, this work points toward future underwater vehicles that travel farther on the same energy, make less noise, and remain stable and controllable in challenging conditions.
Citation: Delelew, E.Y., Dulecha, K.A., Ararso, Z.T. et al. Reinforcement learning-driven model predictive control for optimizing counter-rotating permanent magnet synchronous motor in submarine propulsion system. Sci Rep 16, 5277 (2026). https://doi.org/10.1038/s41598-026-36126-9
Keywords: submarine propulsion, counter-rotating motor, reinforcement learning control, model predictive control, underwater vehicles