Clear Sky Science · en
A joint range–angle–velocity estimation algorithm for FDA-MIMO radar based on graph signal processing
Smarter Radar for a Crowded, Noisy World
From self-driving cars to aircraft surveillance, modern society leans heavily on radar systems that can find and track objects quickly and reliably. As skies, roads, and airwaves grow more crowded, radar has to pick out multiple moving targets in the presence of strong interference and noise. This paper introduces a new way to make a powerful class of radars—called FDA-MIMO radars—see more clearly in three dimensions (distance, direction, and speed) by borrowing tools from an emerging field known as graph signal processing.
Why This New Radar Architecture Matters
Traditional phased-array radars steer their beams mainly across angle, like turning a flashlight left and right. Frequency Diverse Array (FDA) radars work differently: each antenna element transmits at a slightly different frequency. That small twist makes the beam pattern depend not just on angle, but also on distance and time. When combined with multiple-input multiple-output (MIMO) techniques, FDA-MIMO radars can, in principle, pinpoint where a target is in three dimensions: how far away it is, where it sits in angle, and how fast it is moving. The challenge is to extract all of that information quickly and accurately from the raw echoes, especially when there are many targets and the signals are buried in noise.
Turning Radar Echoes into a Network Problem
The authors tackle this challenge by reimagining the radar’s measurements as signals that live on a graph—a network of nodes and links. Each node in this graph represents a particular transmit–receive antenna pair in the FDA-MIMO array, and the links capture how signals at neighboring nodes are related in space. By carefully defining these connections, they build an "adjacency matrix" that describes how echoes should propagate across the array if a target is at a given distance and angle. When the assumed distance–angle pair matches the real target, the measured echo pattern lines up almost perfectly with one of the graph’s natural vibration modes. In practice, this means that, after a graph-based version of the Fourier transform, the energy collapses into a very sharp peak at a single spectral component. The algorithm searches for such peaks across a grid of distance and angle values to find where targets are located. 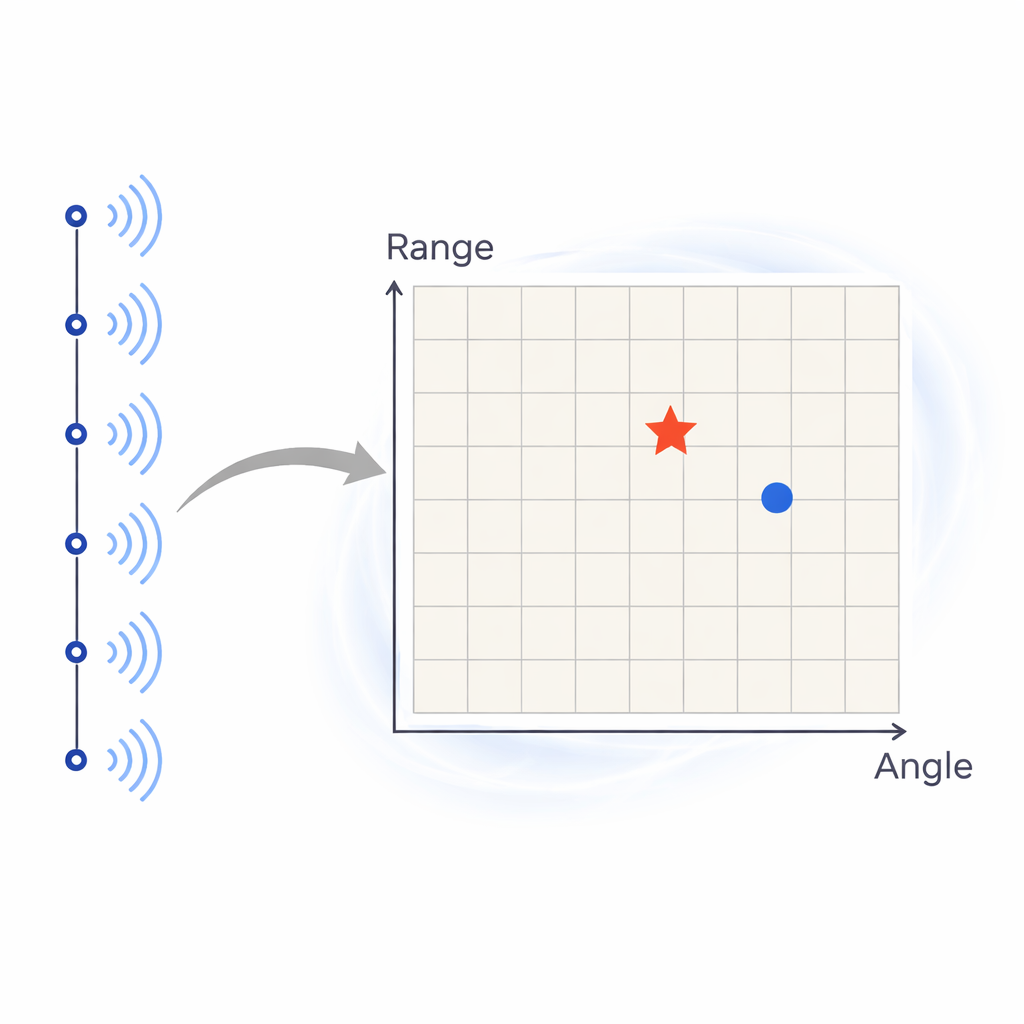
Adding Motion: Measuring Speed with the Same Idea
To estimate how fast a target is moving, the method extends the graph concept into the time dimension, across multiple radar pulses. Now, each node represents a pulse in time, and the links connect neighboring pulses in a loop to capture how the signal should evolve if the target has a certain radial velocity. Once again, when the assumed speed matches the true speed, the transformed signal shows a concentrated peak in the graph’s spectral domain. The algorithm scans through candidate speeds, looking for where this peak is strongest. Crucially, the authors design their framework so that distance–angle estimates from the spatial graph and speed estimates from the temporal graph reinforce each other. Data from all antennas and all pulses are combined, forming a multi-dimensional structure that improves accuracy without duplicating work. 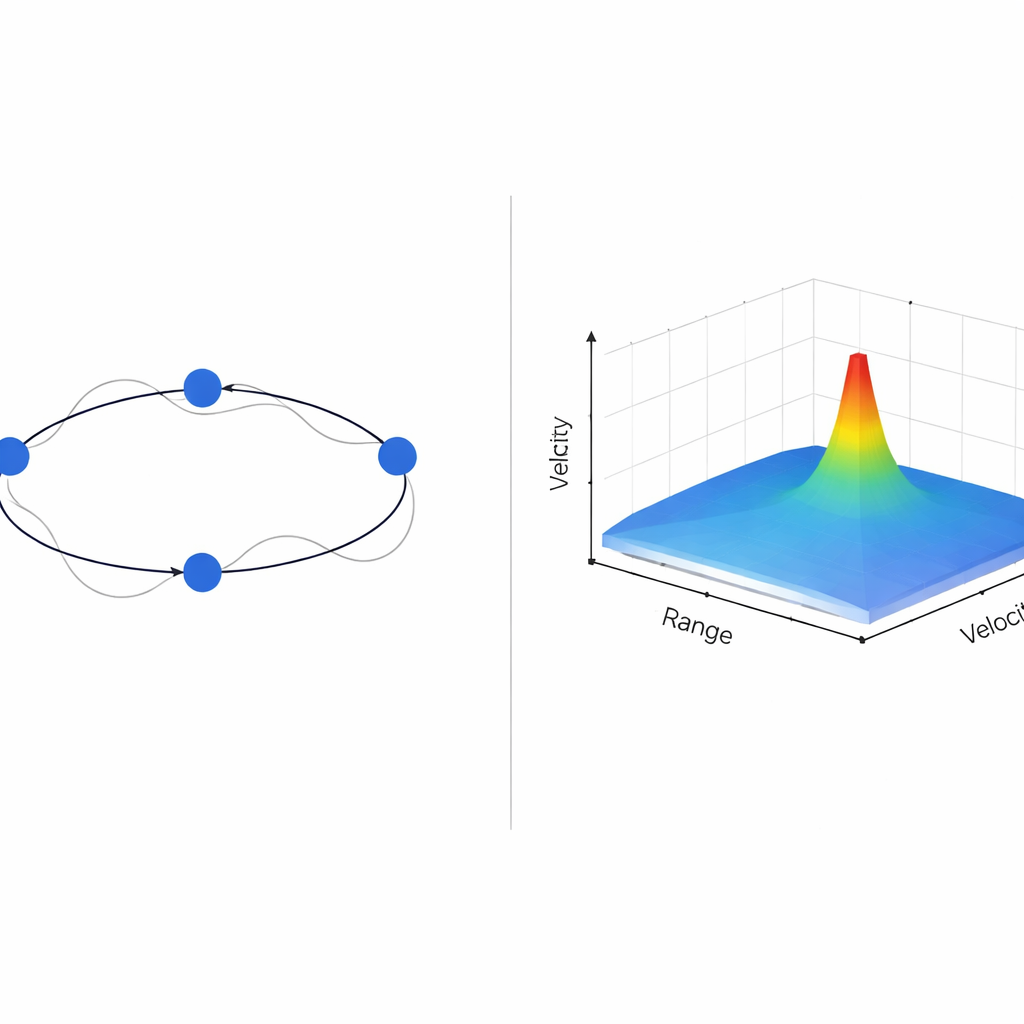
Putting the Method to the Test
Through a series of simulations, the researchers compare their graph-based approach with a widely used high-precision technique known as MUSIC. They test scenarios with single and multiple targets, examine how well each method separates nearby objects, and look at performance when signals are very weak relative to noise. The graph-based algorithm achieves similar overall computational burden to classical methods, but it offers sharper resolution in distance, angle, and speed. It is especially effective at suppressing false peaks caused by noise, leading to cleaner, more reliable target maps. Even when the signal-to-noise ratio is poor—conditions under which many traditional methods struggle—the new algorithm maintains tight error bounds on where the targets are and how fast they are moving.
What This Means for Real-World Radar
In plain terms, this work shows how treating radar data as living on a network allows smarter processing that can more cleanly separate real targets from clutter. For applications ranging from defense and air-traffic control to automotive safety and environmental sensing, the proposed technique promises more accurate tracking of multiple moving objects in difficult conditions, without requiring unrealistic amounts of computation. By merging advanced antenna design with graph-based mathematics, the authors demonstrate a practical path toward radars that see further, sharper, and more reliably in an increasingly complex electromagnetic environment.
Citation: Li, Q., Meng, A., Liao, K. et al. A joint range–angle–velocity estimation algorithm for FDA-MIMO radar based on graph signal processing. Sci Rep 16, 6000 (2026). https://doi.org/10.1038/s41598-026-36124-x
Keywords: radar sensing, target tracking, signal processing, graph signal processing, FDA-MIMO