Clear Sky Science · en
Direction aware and self-adaptive A* algorithm with PPO heuristic for UAV path planning of smart city
Smarter Routes for City Drones
Imagine fleets of small delivery drones weaving through skyscrapers, bringing medicine, packages, or emergency supplies across a busy city. To fly safely and quickly, each drone must constantly decide which way to go next. This paper introduces a new way for drones to find better routes in crowded three‑dimensional city spaces, making their paths shorter, smoother, and more reliable than with traditional methods.

Why Finding a Good Path Is So Hard
For a drone, choosing a path is more than just drawing a straight line from point A to point B. It must dodge buildings, trees, and no‑fly zones while respecting limits on turning and altitude. Classic path planning methods, such as the well‑known A* algorithm, work well on simple maps but struggle in realistic 3D city settings. They often check too many possible next steps, waste computing power, and may produce zigzag routes that are longer than necessary or even fail when the environment is very cluttered. As smart cities grow more complex, these weaknesses become a serious bottleneck for safe and efficient air traffic.
A Direction‑Aware Upgrade to a Classic Tool
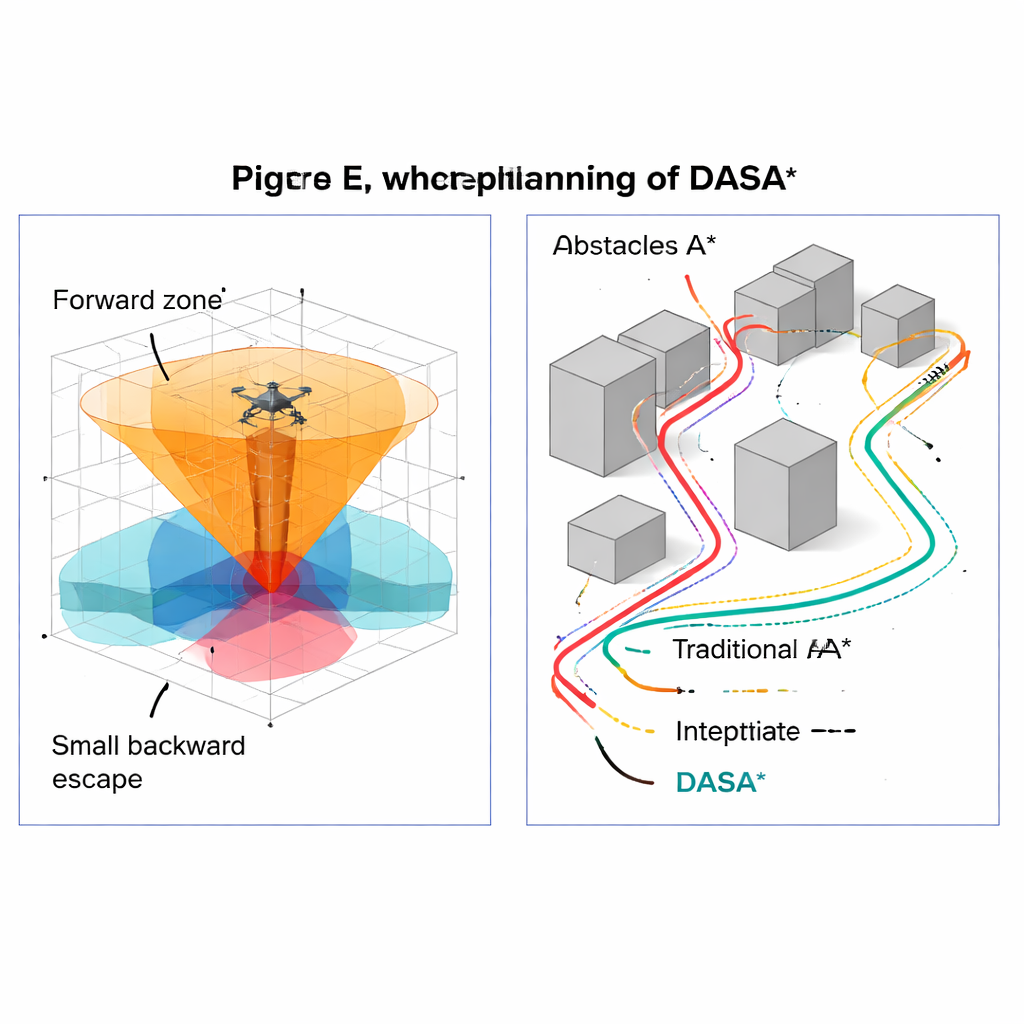
The authors build on the A* algorithm and propose an enhanced version called DASA* (Direction‑Aware and Self‑Adaptive A*). Instead of blindly looking in all directions around the drone, DASA* pays attention to where the goal lies. It classifies nearby candidate positions into three layers: those mostly in front of the drone toward the goal, those off to the sides, and a small set behind it that can help escape dead ends. A simple stall detector watches for signs that the search is getting “stuck” and then automatically widens the search from a narrow forward cone to a fuller neighborhood when needed. This careful, goal‑aligned expansion reduces wasted exploration while still guaranteeing that a valid route will be found if one exists.
Adapting to Crowded and Open Spaces
Another key feature of DASA* is that it changes its stride depending on the surroundings. When the drone is far from obstacles, the algorithm takes larger steps, quickly covering open space. As it approaches buildings or other hazards, it switches to smaller steps, allowing for precise maneuvering in tight gaps. This variable “zoom level” lets the planner move fast where it is safe and slow down only where accuracy matters. After a raw path is found, a dedicated adjustment stage removes unnecessary waypoints and fits a smooth curve through the remaining key points. The result is a route that not only avoids collisions but also looks more like a natural flight path a skilled pilot would choose, with fewer sudden turns.
Teaching the Algorithm to Look Ahead
Traditional A* relies on simple distance formulas to estimate how far each position is from the goal. DASA* replaces this guesswork with a learned guide based on Proximal Policy Optimization (PPO), a modern reinforcement learning technique. In a training environment, a virtual agent repeatedly practices moving toward a target in 3D space while sensing distances, height differences, and direction information. A neural network gradually learns how promising each situation is and, after training, serves as a plug‑in “intuition module” for DASA*. This learned heuristic steers the search more directly toward good solutions, especially in complex layouts where simple straight‑line distance is misleading.
How Well It Works in Virtual Cities
The researchers tested DASA* in multiple simulated 3D city scenarios filled with box‑shaped buildings and cylindrical obstacles that mimic real urban structures. They compared it to classic A* and several popular alternatives, including improved versions of rapidly exploring trees, particle swarms, differential evolution, and another A* variant called Theta*. Across many test cases, DASA* consistently found shorter paths, expanded far fewer candidate points, and ran much faster—often 10 to 50 times quicker than standard A*. It also maintained a perfect or near‑perfect success rate even in dense, maze‑like environments, while some competing methods failed more often or produced long, looping detours.
What This Means for Everyday Life
In plain terms, DASA* gives flying robots a better sense of direction and judgment. By focusing on promising directions, adapting its level of detail to the local environment, using a learned sense of how close it is to success, and polishing the final route, it turns raw map data into flight paths that are efficient, smooth, and practical. If adopted in real systems, such an approach could help future smart cities manage drone deliveries, inspections, and emergency responses more safely and reliably, even as skies grow busier and environments become more complex.
Citation: Zhang, X., Tan, L. & Chai, J. Direction aware and self-adaptive A* algorithm with PPO heuristic for UAV path planning of smart city. Sci Rep 16, 6174 (2026). https://doi.org/10.1038/s41598-026-36066-4
Keywords: UAV path planning, smart city drones, A* algorithm, autonomous navigation, robot motion planning