Clear Sky Science · en
Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization
Keeping Electric Motors Smart Without Extra Hardware
From electric cars to aircraft actuators, many modern machines rely on a special kind of electric motor called a permanent magnet synchronous motor (PMSM). These motors are efficient and powerful, but they usually need delicate sensors to track how fast they spin and where the rotor is. Sensors add cost and can fail in harsh environments. This study explores how to run these motors smoothly and accurately across their entire speed range without using any mechanical sensors at all.
Why Getting Rid of Sensors Is So Hard
In a typical PMSM drive, small position sensors are mounted on the motor shaft to tell the control system exactly where the rotor is. That information is crucial for pushing current into the windings at just the right time, like a carefully timed shove on a spinning merry-go-round. However, sensors can be fragile, bulky, and expensive. Engineers have long tried to replace them with “sensorless” methods that infer rotor position from the motor’s own electrical signals. The catch is that no single method works well at every speed. At low speed the usual electrical cues are weak, while at high speed simple tricks become noisy and inaccurate. Bridging that gap without jerks, vibration, or loss of control has been a persistent challenge.
Two Clever Ways to Listen to the Motor
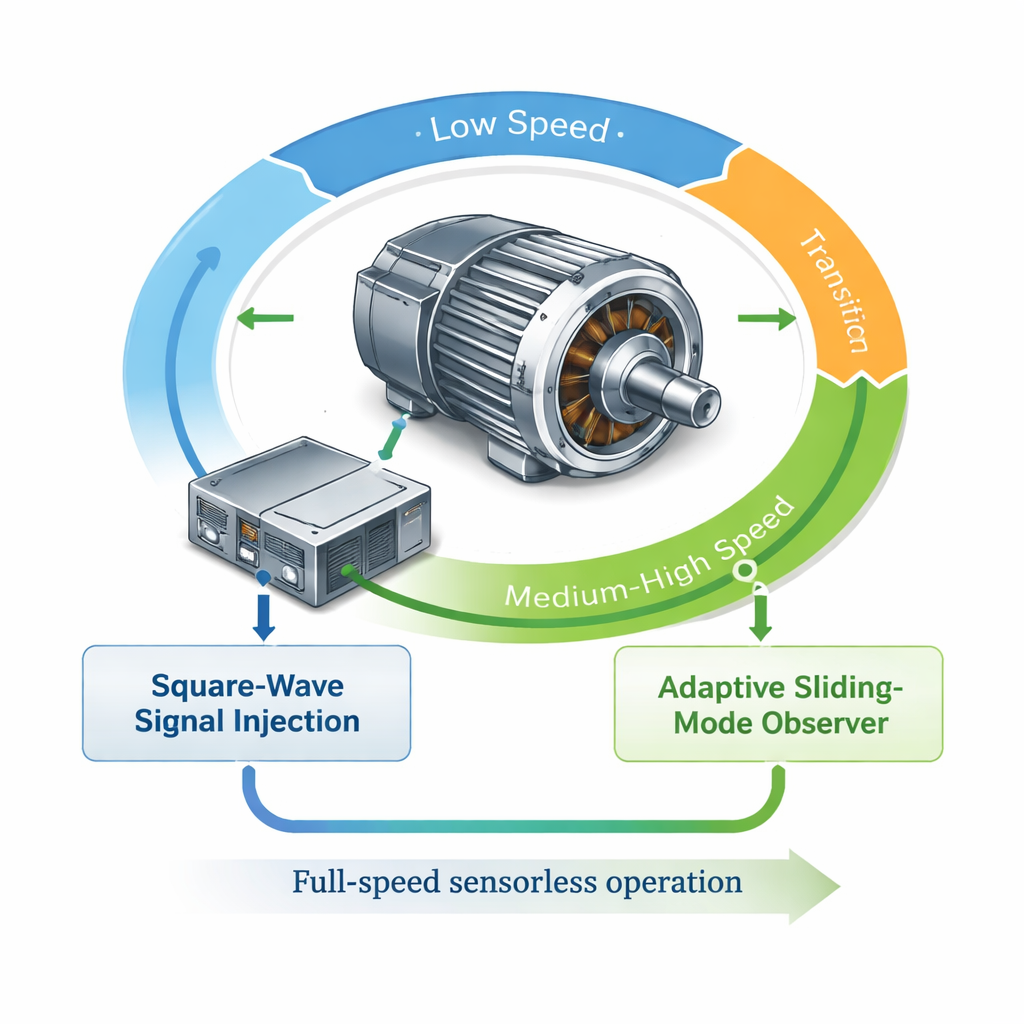
To cover the full speed range, the authors combine two complementary sensorless techniques. At low speeds, where the motor’s natural electrical feedback is too small to measure reliably, they deliberately inject a rapid square-shaped voltage signal into the windings. The motor responds differently depending on the rotor’s angle, so by examining the resulting high-frequency current, the controller can deduce where the rotor is. This “high-frequency injection” approach acts like sending out a gentle probe signal and reading the echo. At medium and high speeds, the motor produces stronger natural feedback, known as back electromotive force. Here, the team uses an advanced mathematical observer that tracks the motor’s behavior and estimates rotor position and speed from the measured voltages and currents.
Making the Digital Observer Smarter and Quieter
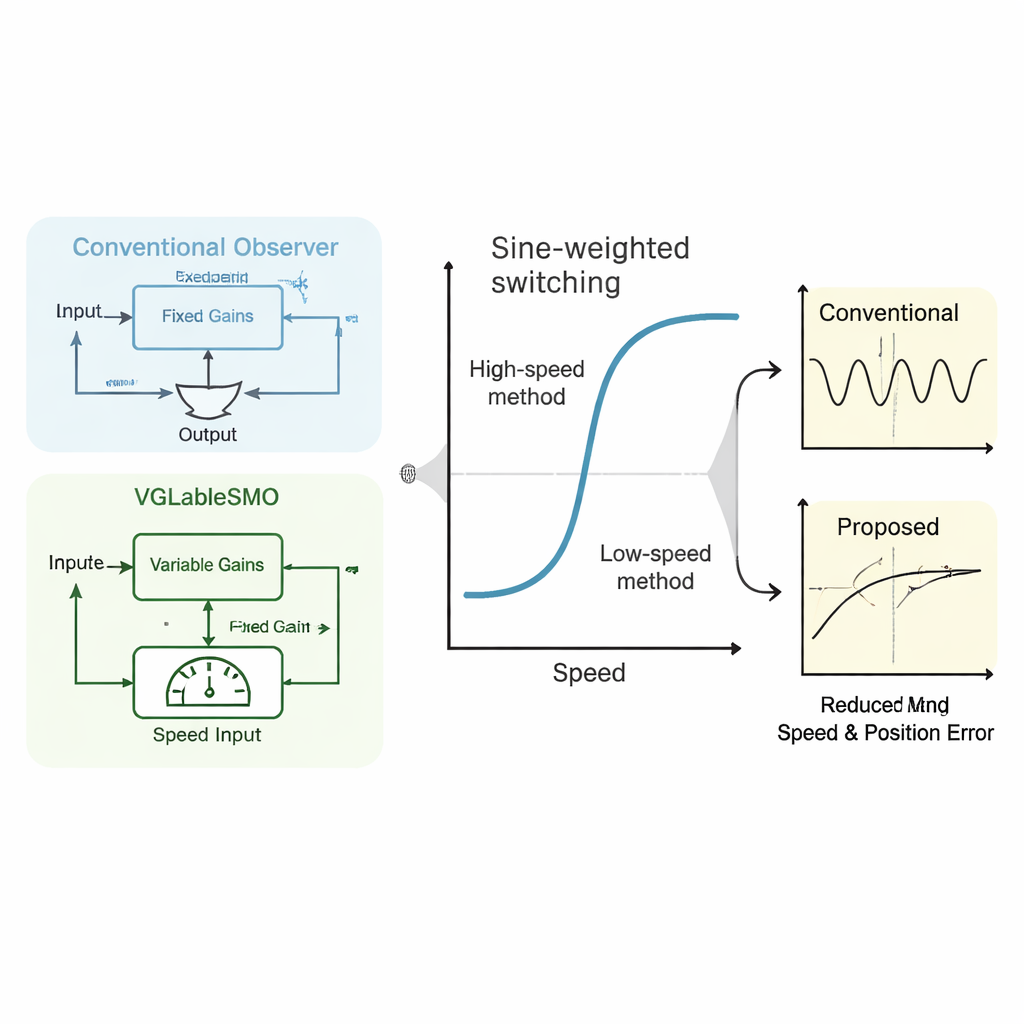
The core innovation on the high-speed side is an upgraded observer called a variable-gain linear super-twisting sliding-mode observer (VGLSTSMO). Traditional sliding-mode observers are admired for being robust against noise and disturbances, but they often suffer from “chattering,” small but rapid oscillations that can ripple into torque and speed. They also rely on fixed internal settings that may perform well in one operating condition but poorly in another. The proposed observer adjusts its internal gains automatically as motor speed changes and adds a corrective term that gently pulls the estimates toward the true values. An adaptive mechanism further refines the estimate of the motor’s internal voltage, improving the accuracy of both speed and position. Computer simulations show that this smarter observer cuts the position error at medium–high speeds from about 0.9 radians to roughly 0.2 radians and shortens the time it takes the system to settle after a load change.
Smoothing the Handshake Between Low and High Speeds
Running two different estimation methods raises another problem: how to hand off smoothly between them as the motor accelerates. A simple approach is to fade out one method and fade in the other using a straight-line weighting, but that can still cause bumps in torque and speed. The authors propose a gentler, sine-shaped weighting function. Within a chosen transition band, the control system gradually shifts trust from the low-speed method to the high-speed observer following a smooth wave-like curve instead of a sharp ramp. This refined blending noticeably reduces speed jumps and angle glitches during the changeover, cutting the transient angle error and halving the time it takes for the errors to settle.
What This Means for Real-World Machines
Overall, the combined strategy—probing the motor at low speed, using an adaptive observer at higher speeds, and switching between them with a smooth sine weighting—delivers stable, accurate control across the entire speed range without mechanical sensors. In simulations, the proposed method keeps speed overshoot and steady errors small while avoiding the harsh chattering that can cause noise, wear, and discomfort. For everyday applications, this means electric vehicles, industrial drives, and propulsion systems could become more reliable, more compact, and cheaper to build, all while maintaining precise motion control without depending on fragile shaft-mounted sensors.
Citation: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
Keywords: sensorless motor control, permanent magnet synchronous motor, sliding-mode observer, high-frequency signal injection, electric drive systems