Clear Sky Science · en
Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications
Robots Join the Tea Factory
Fresh tea leaves are delicate: crush a bud or bruise a leaf and the final drink suffers. Yet sorting these leaves by hand is tiring, slow work. This paper explores how a fast, lightweight industrial robot—called a Delta robot—can be tuned so it moves quickly and precisely over tea conveyor belts while handling the leaves gently and reliably.
Why Tea Leaves Need Special Treatment
In modern tea processing, sorting fresh leaves is vital for quality and price. Human workers struggle to keep pace and maintain consistency, especially over long shifts. Delta robots, widely used for high-speed packaging, seem like a natural fit: they are stiff, accurate, and can dart around at impressive speeds. However, most previous designs were aimed at generic objects such as boxes or nuts, not fragile tea buds confined to a narrow zone between two conveyor belts. The robot’s “workspace”—the three-dimensional region it can reach—must match this tight area and follow a specific gate-shaped motion: grasp, lift, move across, and place, all without bumping into its own parts or missing targets.
How the Robot’s Shape Controls Where It Can Reach
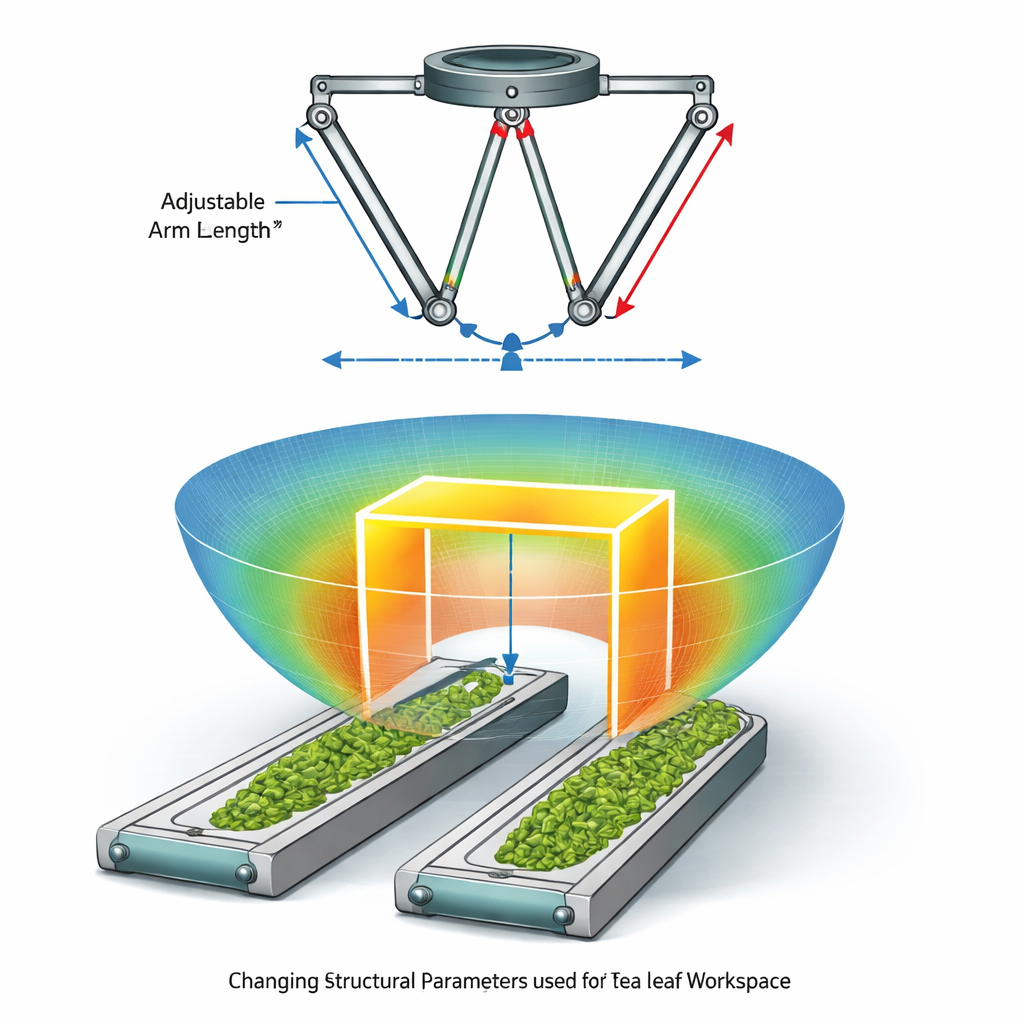
The authors start by building a detailed mathematical description of the Delta robot’s motion. They connect the angles of its three driving joints to the exact position of the small moving platform that carries a suction gripper. Using both forward (angles to position) and inverse (position to angles) calculations, they define every point the end-effector can physically reach when joint angles are limited to a safe range. With these equations coded in MATLAB, they simulate the robot’s full reachable volume and display it from several viewpoints as a colorful, bowl-shaped cloud of points. This workspace then serves as the foundation for judging whether a given mechanical design can handle the tea-sorting path.
Testing Many Designs with Virtual Experiments
Instead of building multiple physical prototypes, the team treats four key geometry choices as design knobs: the length of the upper arms (L), the length of the lower arms (l), the radius of the fixed base triangle (R), and the radius of the moving triangle (r). They use an orthogonal experimental layout, which efficiently samples combinations of these four parameters at three levels each, yielding nine virtual robots. For each, the program computes the total workspace volume and shows how it overlaps a standardized gate-shaped path box measuring 200 mm high, 400 mm wide, and 200 mm deep. This lets the researchers see not only how big each workspace is, but also whether it actually covers the region where tea leaves travel on the belts.
Finding Which Dimensions Matter Most
By comparing the nine simulated designs, the study ranks how strongly each structural choice influences usable reach. The clear winner is the passive (lower) arm length: longer lower arms greatly enlarge the workspace. Next in importance is the active (upper) arm length, which also expands motion range but can introduce vibration if made too long. The base radius has a moderate effect; if the base is too wide, the moving arms collide more easily with the frame, shrinking the truly usable volume. The radius of the moving platform has the weakest effect, but a smaller platform still helps slightly by opening up space for arm motion. Range and variance analyses show that while some parameter sets give the largest total workspace, they do not necessarily cover the narrow, gate-shaped region that matters for tea sorting.
A Design That Fits the Tea Line
The most practical configuration turns out not to be the one with the biggest volume overall, but the one whose workspace neatly wraps around the gate-shaped trajectory. One particular combination—250 mm upper arms, 400 mm lower arms, a 90 mm base radius, and a 50 mm moving platform radius—fully covers the required path between the two conveyor belts while keeping the robot compact and stable. At an operating height around 325 mm above the reference plane, the robot achieves its widest usable span, more than enough to span both belts and complete the grasp–lift–translate–place cycle without leaving the safe region.
What This Means for Future Tea Factories
For non-specialists, the key message is that small changes in a robot’s limb lengths and platform sizes can make the difference between a machine that merely moves impressively in open space and one that works reliably on a real production line. By quantifying how each structural parameter shapes the reachable volume and its overlap with a realistic gate-shaped path, this study offers a recipe for designing Delta robots that sort tea leaves quickly, accurately, and with minimal damage. The same approach can guide custom robots for other foods or fragile products wherever speed, precision, and gentle handling must all be satisfied at once.
Citation: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
Keywords: delta robot, tea leaf sorting, robot workspace, pick-and-place, industrial automation