Clear Sky Science · en
Optimal fuel cell control modeling with feedback linearization and adaptive sliding mode control
Why smarter fuel cells matter for everyday life
Hydrogen fuel cell cars promise exhaust that is only water vapor, quick refueling, and long driving range. But inside each fuel cell stack, thin membranes and tightly controlled gas flows must stay within safe limits. If the pressure on one side of the membrane rises too high compared with the other, the membrane can be damaged, shortening the system’s life and reliability. This paper explores a new way to control those pressures more precisely, helping future fuel cell vehicles run more efficiently, last longer, and better withstand real‑world driving conditions.
Keeping the fuel cell’s “lungs” in balance
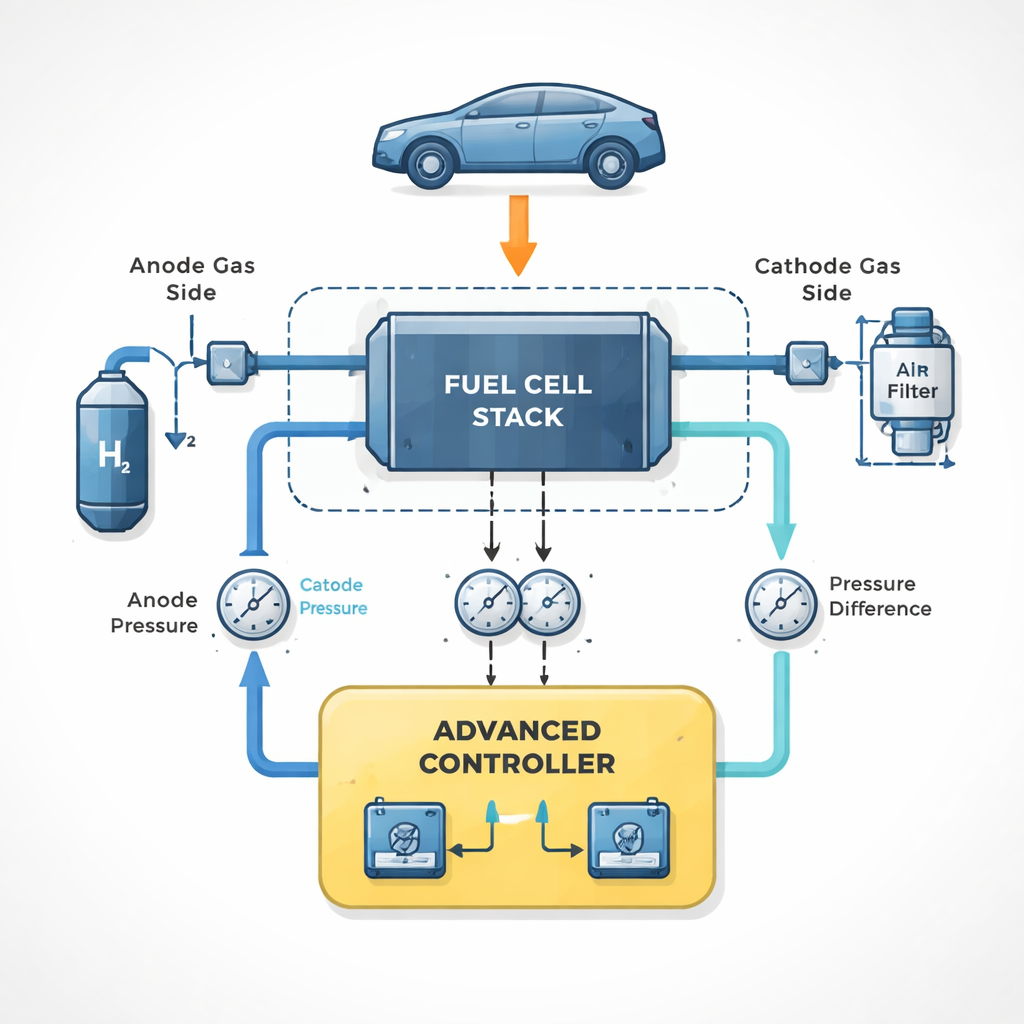
A proton exchange membrane fuel cell (PEMFC) works a bit like a pair of artificial lungs for a car: hydrogen is fed to one side (the anode) and air to the other side (the cathode). Electricity is produced when hydrogen and oxygen react across a thin polymer membrane. For this process to be safe and efficient, engineers must carefully regulate both the flow and pressure of gases on each side. In vehicles, rapid accelerations, braking, and purge operations constantly disturb these conditions, making the pressure difference between anode and cathode swing up and down. Large or frequent swings can tear or fatigue the membrane, leading to failures and costly replacements.
Limitations of traditional control methods
Most existing fuel cell systems rely on traditional control schemes such as PID (proportional–integral–derivative) controllers, or on basic versions of a more advanced method called sliding mode control. These methods can keep average pressures in a reasonable range, but struggle when the system behaves in a highly nonlinear way—exactly what happens when temperature, humidity, gas composition, and load all vary together. Many earlier designs also focused on only one gas, such as oxygen or hydrogen, and often ignored the roles of nitrogen and water vapor in the cathode. As a result, they could not fully coordinate gas flow and pressure, making it difficult to guarantee a small, safe pressure difference across the membrane under all driving conditions.
Turning a complex system into a simpler one
The authors tackle this challenge by first building a detailed physical model of the gas supply system, tracking the pressures of hydrogen, oxygen, nitrogen, and water vapor on both sides of the fuel cell. They then apply a mathematical technique called feedback linearization. In simple terms, this technique reshapes the equations describing the fuel cell so that, from the controller’s point of view, the messy nonlinear behavior starts to look like a pair of cleaner, almost linear subsystems—one for hydrogen pressure and one for oxygen pressure. This “decoupling” means the controller can adjust hydrogen and air flows more independently, without one change unexpectedly disturbing the other.
An adaptive safety net for pressure control
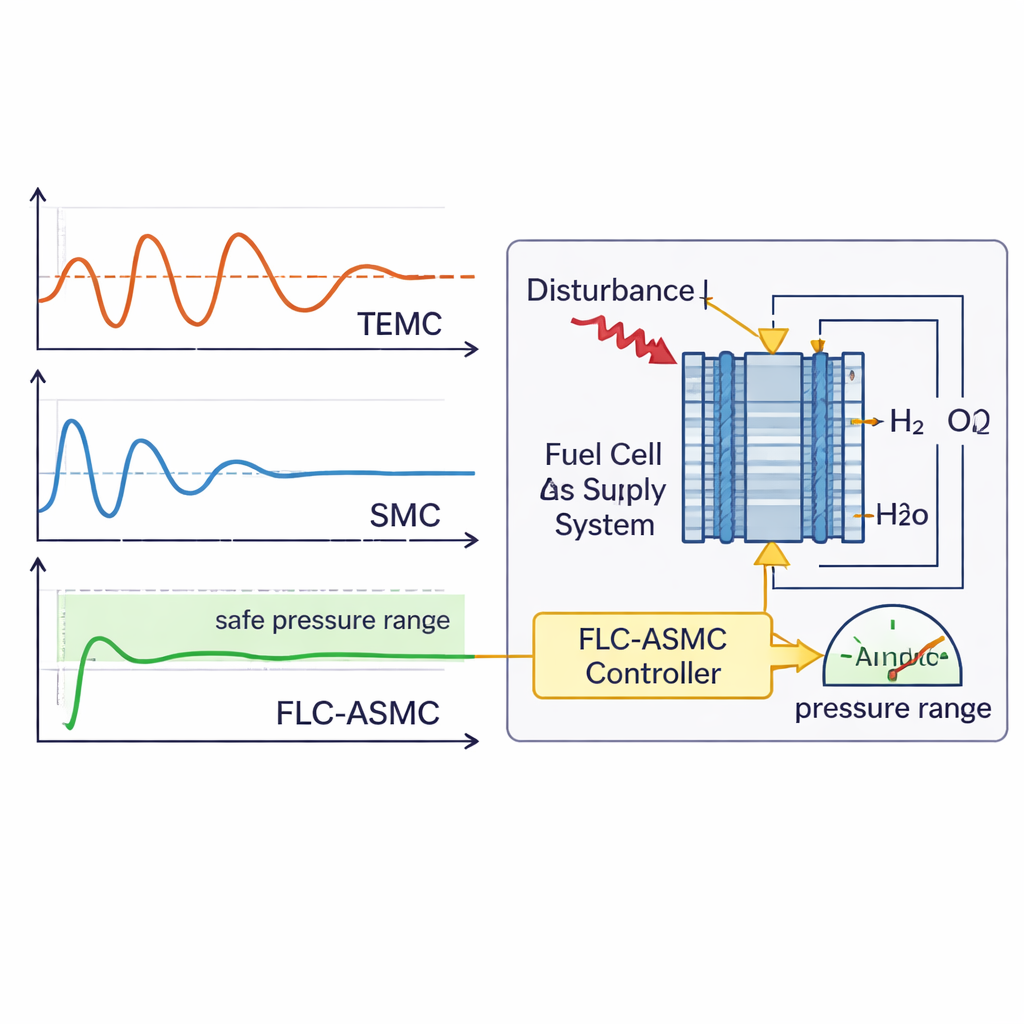
On top of this decoupled model, the researchers design an adaptive sliding mode controller. Sliding mode control uses a kind of target surface in the space of tracking errors and forces the system to slide along it toward the desired pressures, which gives strong robustness to disturbances. However, classic versions can cause chattering—rapid switching that may wear out valves or compressors. Here, the controller continuously adapts its internal parameters based on how large the pressure errors are, and it softens the switching behavior inside a narrow “boundary layer.” This combination, called FLC‑ASMC in the paper, keeps the anode and cathode pressures close to their set points while automatically compensating for unknown disturbances such as load surges or small modeling errors.
How much better is the new controller?
The team tests their controller in simulations that mimic two vehicle scenarios: a sudden jump in load current, and a more demanding case where a step change is combined with a sinusoidal fluctuation, representing stop‑and‑go or uneven driving. They compare three controllers: a tuned PID, a classical sliding mode controller, and their proposed FLC‑ASMC. While all three keep the overall stack voltage stable, big differences appear in how they manage the critical pressure difference across the membrane. The PID controller achieves about 85% tracking accuracy, classical sliding mode control improves this to around 90–92%, and the new FLC‑ASMC exceeds 95%. It reduces settling time by up to about 70% and cuts overshoot in pressure difference by roughly half compared with the other methods, all while significantly reducing oscillations.
What this means for future hydrogen cars
To a layperson, the key message is that this new control strategy acts like a smarter, more protective “breathing regulator” for fuel cell vehicles. By decoupling and tightly managing gas flows and pressures on both sides of the membrane, it keeps the pressure difference in a safe band even when the driver demands sudden bursts of power or the road conditions are complex. This should translate into longer fuel cell life, higher reliability, and better tolerance to harsh real‑world operation, bringing practical hydrogen‑powered transportation one step closer to everyday roads.
Citation: Fan, S., Xu, S. Optimal fuel cell control modeling with feedback linearization and adaptive sliding mode control. Sci Rep 16, 5621 (2026). https://doi.org/10.1038/s41598-026-35888-6
Keywords: hydrogen fuel cell vehicles, PEM fuel cell control, pressure difference protection, adaptive sliding mode control, feedback linearization