Clear Sky Science · en
Application of a temporal convolutional network algorithm fused with channel attention module for UWB indoor positioning
Why Finding People Indoors Is So Hard
Smartphones, robots, and warehouse robots all need to know exactly where they are, even when GPS satellites cannot reach them inside buildings. Ultra‑wideband (UWB) radio has become a leading candidate for this job because it can measure distances with centimeter‑level precision. Yet in busy real‑world spaces filled with walls, glass, and moving people, those radio signals often bounce, bend, or are temporarily blocked, causing sudden jumps in the reported position. This article explores a new artificial‑intelligence based method that makes UWB positioning much more accurate and stable in such messy indoor environments.
Radio Pulses in a Crowded Room
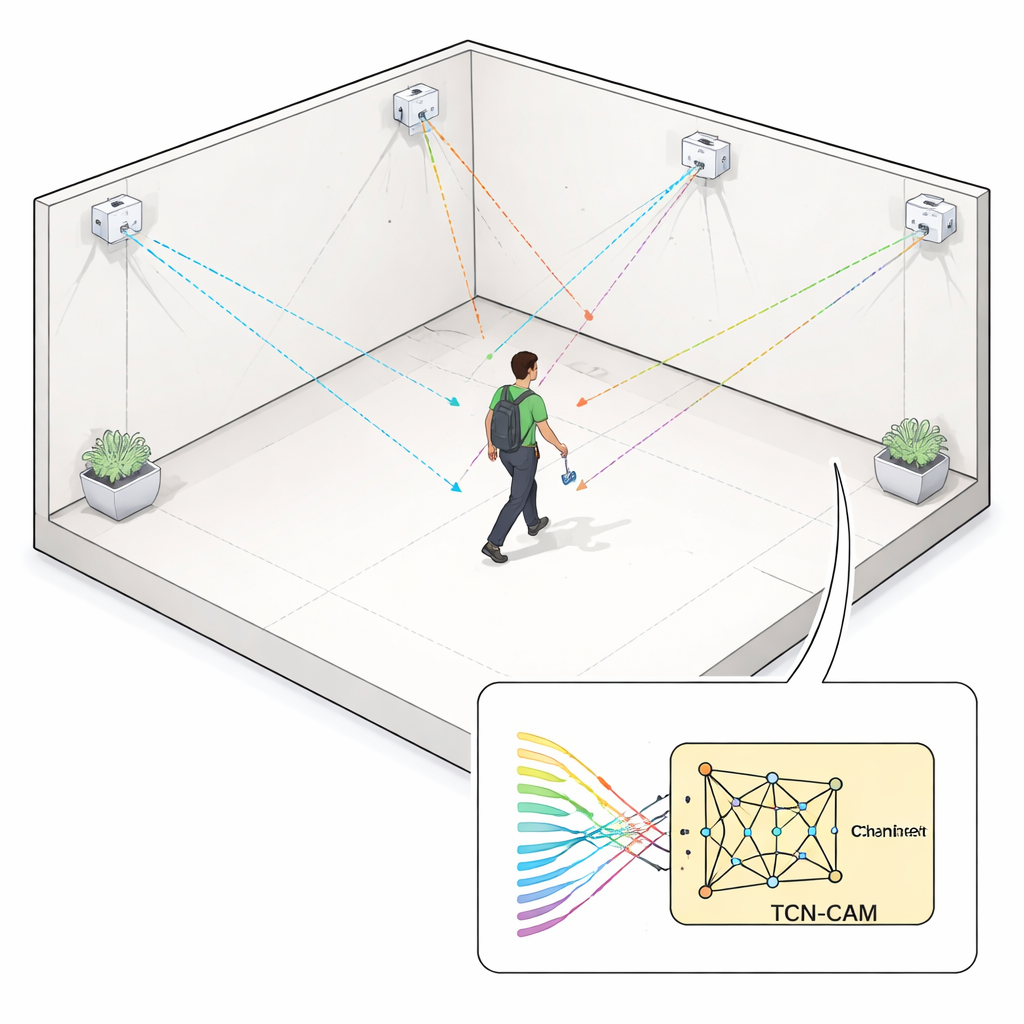
UWB systems locate a device, called a tag, by measuring how long extremely short radio pulses take to travel between the tag and several fixed base stations. In simple, open spaces this “time of arrival” approach works well. But indoors, signals often follow indirect paths—bouncing off doors, windows, and people—before reaching a receiver. These non‑line‑of‑sight paths, or NLOS for short, make the tag seem farther away than it really is. Traditional fixes rely on carefully crafted mathematical filters or on machine‑learning tools that first try to label each signal as clean or distorted. While helpful, these methods either depend heavily on expert tuning or still struggle when people move unpredictably through the space.
Letting the Data Tell the Story Over Time
The researchers propose a different strategy: rather than treating each distance reading in isolation, they look at how the readings change over time and let a deep‑learning model learn the patterns. Their core tool is a temporal convolutional network (TCN), a kind of neural network designed for time‑series data. Unlike recurrent networks that process one moment after another, TCNs use one‑dimensional convolutions that can examine long stretches of history in parallel. This design avoids common training problems and allows the model to notice subtle, longer‑term trends—such as how a person walking between the tag and a base station temporarily stretches the measured distance and then lets it snap back.
Teaching the Network What to Pay Attention To
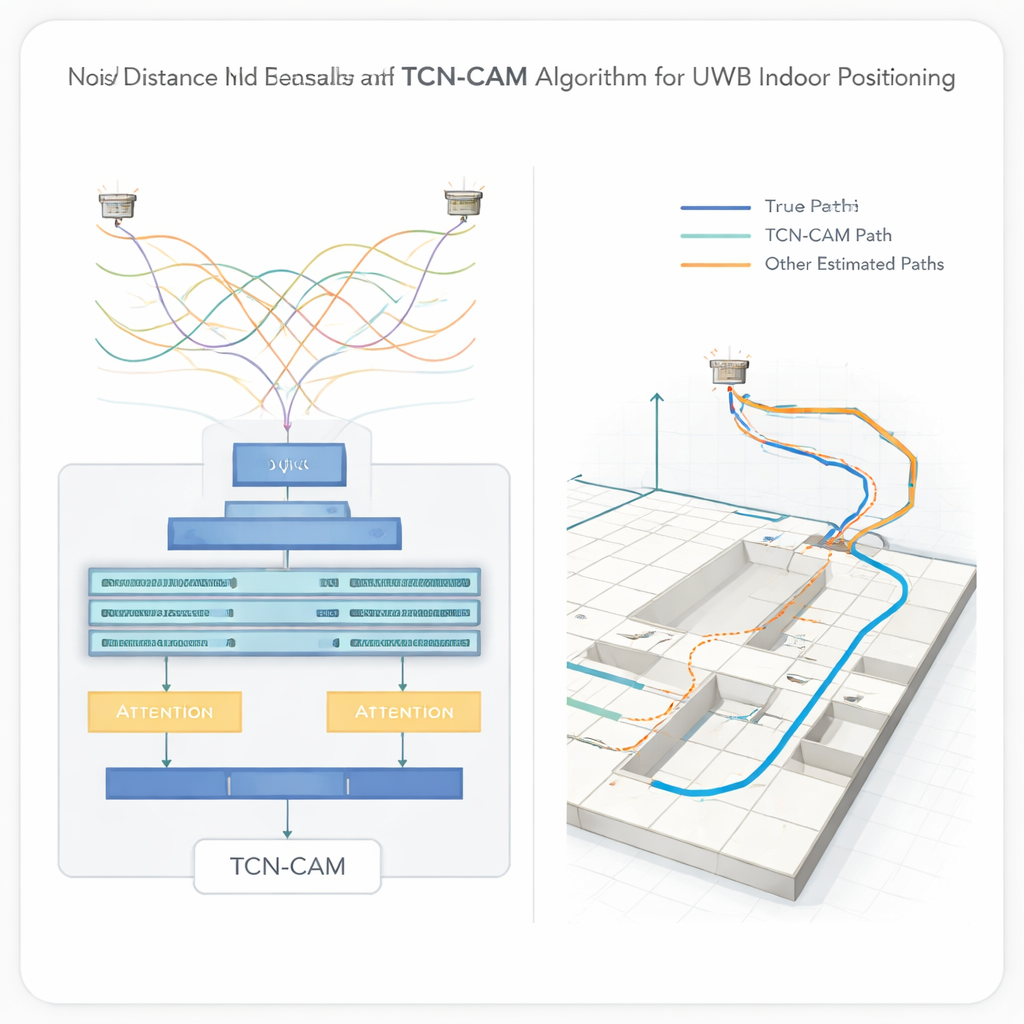
On top of the TCN, the team adds a channel attention module (CAM). Each base station produces its own stream of distance readings, and not all of them are equally trustworthy at every moment. CAM learns to assign different weights to these streams, boosting those that look consistent and downplaying those that appear corrupted by reflections or blockages. Together, the combined TCN‑CAM network takes raw, noisy distances from six base stations and outputs the best estimate of the tag’s three‑dimensional coordinates, all in one end‑to‑end step without a separate signal‑classification stage.
Testing in Simulated Noise and Real Hallways
To see how well the method works, the authors first created thousands of virtual indoor positions and simulated UWB measurements with varying levels of added noise and NLOS errors. They compared their TCN‑CAM approach with three competitors: a long short‑term memory network with attention, a standard TCN, and a convolutional network with channel attention. As the simulated interference grew stronger, errors increased for all methods, but TCN‑CAM consistently produced the smallest errors and the tightest spread in results, indicating both higher accuracy and greater reliability. In the harshest test conditions, it reduced average position errors by roughly one‑quarter to one‑half compared with the other methods.
From Laboratory to Real‑World Movement
The team then moved to a real indoor test site equipped with six UWB base stations, a high‑precision surveying instrument, and people walking around to deliberately cause signal blockages. The new algorithm located the moving tag with an average error of just 3.32 centimeters. That was about 19% better than a plain TCN, 25% better than the convolution‑plus‑attention model, and an impressive 76% better than the LSTM‑based approach. The TCN‑CAM results not only cluster more tightly around the true path, they also track the actual three‑dimensional trajectory of the tag more faithfully in every direction.
What This Means for Everyday Technology
For non‑specialists, the takeaway is simple: by letting a smart model watch how UWB distance readings change over time and learn which signals to trust at each moment, indoor positioning can become much more precise and less jumpy, even when people are moving around and blocking the radio path. Although the method needs retraining if the fixed base stations are moved, it offers a powerful and practical solution for factories, hospitals, warehouses, and smart buildings where the infrastructure stays put. As similar deep‑learning techniques mature and begin to fuse UWB with other sensors, indoor devices of all kinds may soon know their locations almost as reliably as your phone does outdoors.
Citation: He, L., Lian, Z., Núñez-Andrés, M.A. et al. Application of a temporal convolutional network algorithm fused with channel attention module for UWB indoor positioning. Sci Rep 16, 6305 (2026). https://doi.org/10.1038/s41598-026-35802-0
Keywords: indoor positioning, ultra-wideband, deep learning, time-series analysis, location tracking