Clear Sky Science · en
YOLO11-WLBS: an efficient model for pavement defect detection
Why better road checks matter
Every crack and pothole in the road is more than an eyesore—it can shorten a pavement’s life, damage vehicles, and contribute to crashes. Today, many roads are still inspected by people driving slowly along with clipboards or simple cameras, which is time‑consuming, expensive, and easy to get wrong. This study introduces YOLO11‑WLBS, a smarter, lighter computer‑vision system that can spot different kinds of road damage in real time, even on a smartphone or drone, promising faster and safer maintenance of our road networks.
From slow patrols to smart cameras
As traffic grows and road networks expand, defects such as transverse and longitudinal cracks, alligator cracking, oblique cracks, potholes, and patch repairs are becoming more common. Traditional inspection—walking or driving surveys, or simple image processing—depends heavily on human judgement and struggles in poor lighting or cluttered scenes. Over the past decade, deep learning and, in particular, the YOLO family of object‑detection networks have transformed image analysis by learning patterns directly from raw pictures. Earlier YOLO‑based pavement systems improved accuracy but still faced a core trade‑off: models that were accurate enough were often too large and slow for real‑time use on drones, vehicles, or handheld devices.
A tuned engine built on YOLO11
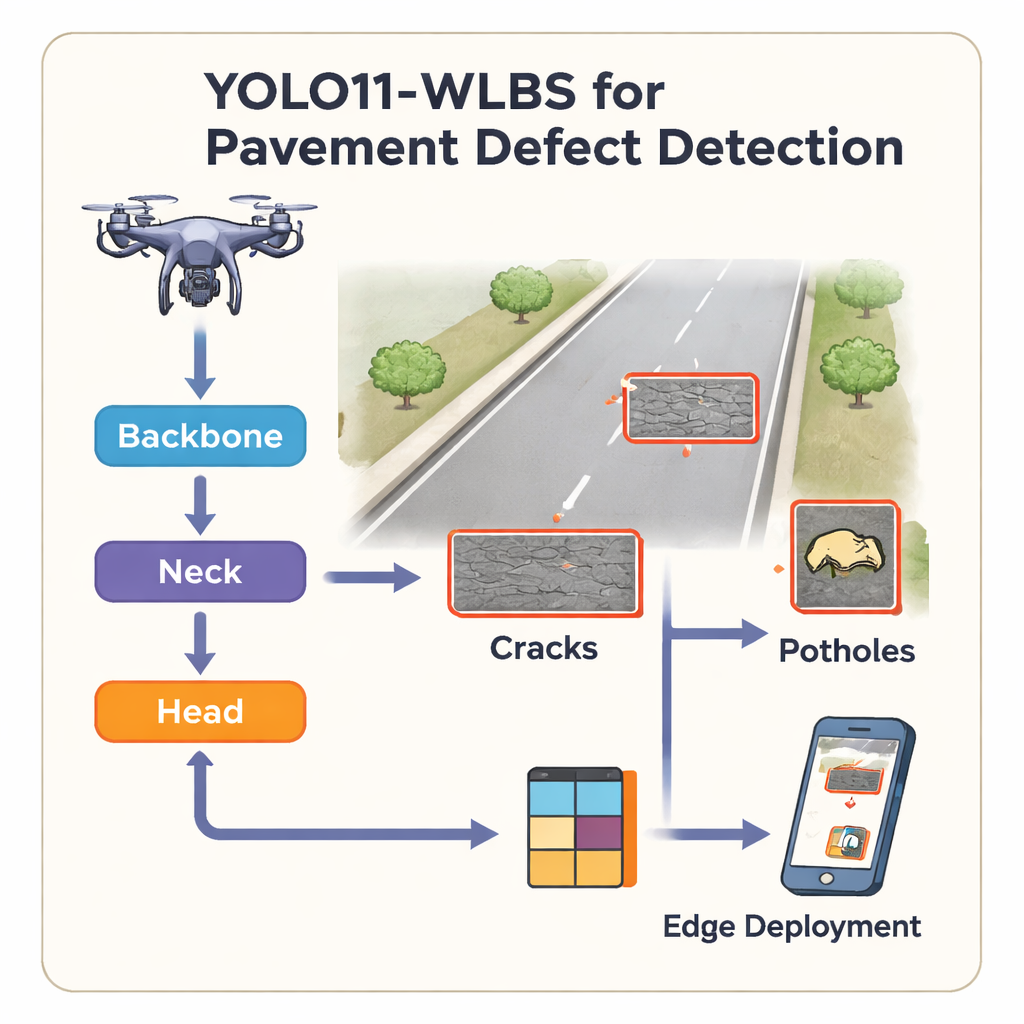
The authors start from YOLO11, a modern object‑detection network that already balances speed and accuracy, and tailor it for the special challenges of road surfaces. Their enhanced model, named YOLO11‑WLBS, keeps the usual three‑stage design—"backbone" for feature extraction, "neck" for combining information at different scales, and "head" for drawing boxes and labels around defects—but adds four carefully chosen upgrades. Together, these additions sharpen the model’s eye for fine cracks, improve its handling of multiple defect sizes, and trim unnecessary computation so it can run efficiently on edge devices.
Four smart tricks for seeing cracks
The first upgrade uses wavelet‑based convolution to emphasize high‑frequency details—the sharp changes in brightness that outline cracks and small holes—without bloating the model. This helps the system notice faint, thin, or irregular defects that standard filters might miss. Next, a "lightweight adaptive extraction" step reorganizes feature maps so that the network focuses its effort on the most informative channels while cutting the total number of parameters by about a quarter. A bidirectional feature pyramid then lets information flow up and down between coarse and fine scales, improving recognition of both tiny fissures and larger, connected crack patterns. Finally, a simple attention mechanism highlights the most important regions in each feature map, guiding the detector toward true defects and away from distractions such as lane markings, shadows, or stains.
Proving it works in the real world
To test YOLO11‑WLBS, the team trained and evaluated it on high‑resolution drone images of real pavements, covering more than ten thousand labeled defects across six categories. Compared with the original YOLO11, the new model boosts precision from 0.853 to 0.947 and recall from 0.698 to 0.895, meaning it both makes fewer false alarms and misses far fewer defects. Its overall detection score (mAP@0.5) rises by 12.2%, while the number of parameters drops by about 25.5%. The system remains accurate under low and high lighting and when images are blurred or downsampled, and it transfers well to a separate drone dataset with different viewpoints and lower resolution. The authors even deploy a fully quantized version on an Android smartphone, achieving close to 30 frames per second for live video detection of multiple crack types.
What this means for drivers and cities
In simple terms, YOLO11‑WLBS is a faster, sharper pair of eyes for our roads. By combining better edge detection, smarter use of model capacity, multi‑scale feature fusion, and lightweight attention, it finds more defects while running on modest hardware such as drones and phones. This makes it practical to scan long stretches of pavement frequently, spot problems early, and plan repairs more efficiently, all without sending large teams into traffic. Although the model still struggles somewhat with rare defects like potholes—mainly because there are fewer examples to learn from—it provides a strong foundation for future systems that not only detect where the road is damaged but also estimate how severe the damage is, guiding cities toward safer and more cost‑effective maintenance.
Citation: Lin, J., Wang, P., Ruan, Y. et al. YOLO11-WLBS: an efficient model for pavement defect detection. Sci Rep 16, 5284 (2026). https://doi.org/10.1038/s41598-026-35743-8
Keywords: pavement defect detection, road crack detection, YOLO11-WLBS, drone inspection, edge AI