Clear Sky Science · en
A novel adaptive neuro-fuzzy and adaptive proportional resonant control scheme for PMSM based electric vehicle applications
Quieter, Smoother Electric Rides
Electric cars are already cleaner than gasoline vehicles, but how their motors are controlled still leaves room for improvement. Sudden jerks when you press the pedal, faint buzzing from the motor, and wasted energy all trace back to how quickly and smoothly the motor can respond to changing road and traffic conditions. This paper explores a new way of "driving" the motor from the inside—using a blend of artificial intelligence and a special kind of signal shaping—to make electric vehicles accelerate more smoothly, waste less energy, and cope better with real-world disturbances.
Why Motor Control Matters on Real Roads
Modern electric cars often use permanent magnet motors because they are compact, efficient, and deliver strong pull from a standstill. But city driving is messy: drivers stop and start at traffic lights, weave through congestion, and face hills and changing loads. Under these conditions, the motor’s speed can overshoot or lag behind what the driver requests, and the twisting force on the shaft can ripple. Those ripples show up as vibration, noise, and extra stress on gears and bearings. Traditional control circuits, which rely on fixed tuning knobs, work well only around a narrow set of conditions and can struggle when the road, temperature, or vehicle load change.
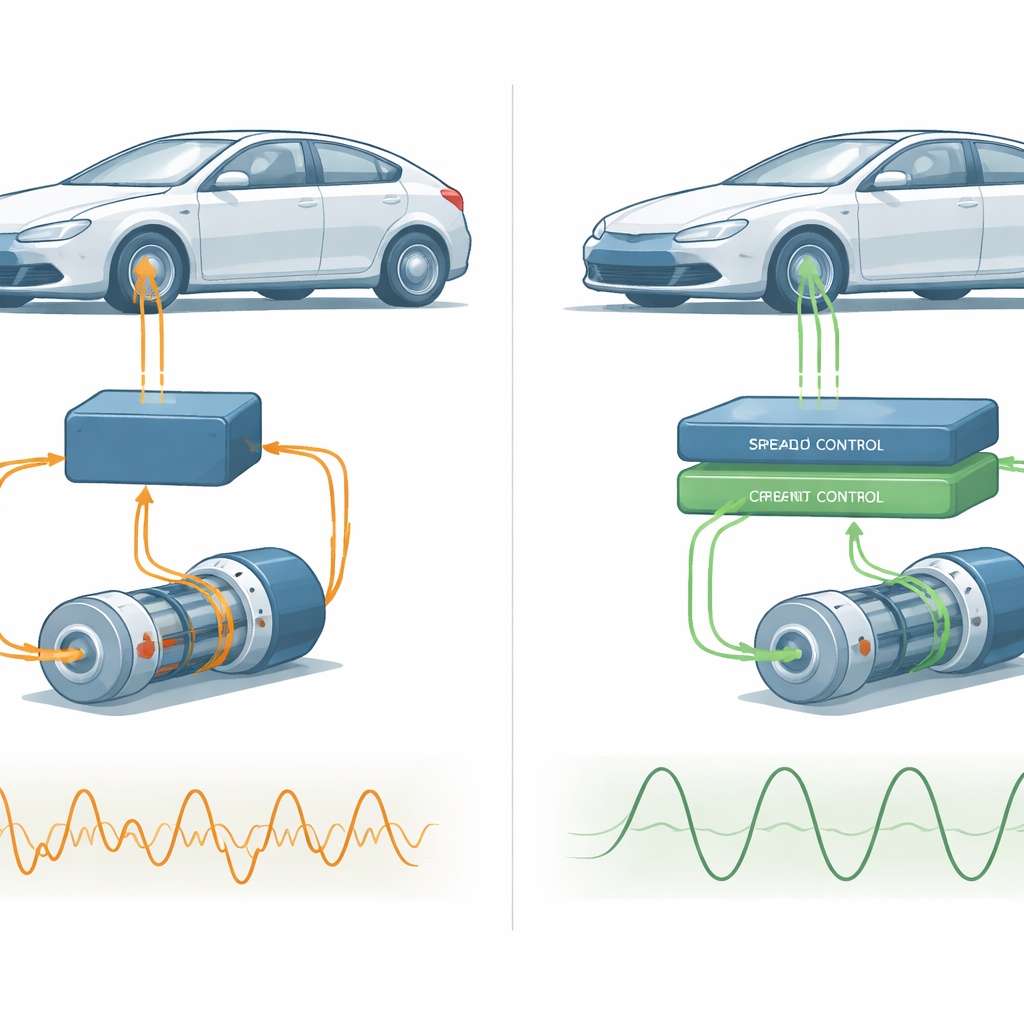
Blending Learning and Rules for Better Speed Control
The authors replace the usual outer speed-control block with an adaptive neuro‑fuzzy system—a controller that combines the if–then rules of fuzzy logic with the learning ability of neural networks. Instead of being hand‑tuned once at the factory, this controller learns from example data how motor speed responds to commands and disturbances. It translates raw speed error (how far the actual speed is from the desired one) and how fast that error is changing into a set of overlapping “opinions,” then blends them into a precise correction. Training and testing results show that this learned controller quickly finds settings that cut overshoot and undershoot, shorten the time it takes to reach the target speed, and keep behavior stable even when the system is nonlinear and subject to change.
Shaping Current for Calm, Low-Noise Operation
While the outer loop decides how fast the motor should spin, the inner loop decides how much electric current flows into the coils at each instant. Here, the authors introduce an adaptive proportional resonant controller. Instead of reacting only to the size of the error, this controller is tuned to pay special attention to currents at the motor’s main alternating frequency, where unwanted ripples are most harmful. By carefully choosing a few key tuning values, it gives very high correction power at that fundamental frequency while avoiding instability elsewhere. The result is current that looks almost like a perfect sine wave, with far fewer sharp wiggles that would otherwise show up as torque ripple and audible whine.
Putting the New Strategy to the Test
The team evaluates their two‑stage design—neuro‑fuzzy speed control in the outer loop and resonant current control in the inner loop—through detailed computer simulations and hardware‑in‑the‑loop experiments that mimic a real electric vehicle drivetrain. They compare it against three established methods: a conventional proportional–integral controller, a scheme that pairs that controller with a resonant inner loop, and a model‑predictive approach. Across a range of scenarios—start‑up from rest, steady running under load, rapid changes in speed at constant load, and sudden load changes at constant speed—the new scheme consistently reaches target speed faster, with smaller peaks and dips. It also produces smoother torque and cleaner currents, even when the motor’s resistance and inductance are artificially shifted to imitate heating or harsh environments.
What This Means for Future Electric Cars
In plain terms, this hybrid control strategy lets an electric motor think and adapt rather than blindly follow a fixed recipe. By learning how to reject disturbances at the speed level and by sculpting the current waveforms inside the motor, the approach cuts vibration, noise, and wasted energy. For drivers, that translates into smoother acceleration, more stable cruising, and drivetrains that can better tolerate aging components and changing weather. While the method still assumes a fixed operating frequency in some parts, the results suggest that adding intelligence and frequency‑aware control to motor drives could be a key step toward more refined, durable, and efficient electric vehicles.
Citation: Sangeetha, E., Ramachandran, V.P. A novel adaptive neuro-fuzzy and adaptive proportional resonant control scheme for PMSM based electric vehicle applications. Sci Rep 16, 8023 (2026). https://doi.org/10.1038/s41598-026-35363-2
Keywords: electric vehicle motors, neuro fuzzy control, permanent magnet synchronous motor, torque ripple reduction, advanced motor drives