Clear Sky Science · en
Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems
Making Complex Systems Behave
From managing fish populations to keeping power grids and electronic circuits stable, many real-world systems behave in complicated, nonlinear ways. Engineers use advanced control algorithms to keep such systems safe and efficient, even when they are buffeted by disturbances and uncertainty. This paper introduces a new control strategy that tames these unruly systems more smoothly, avoiding the harsh, rapid switching that can damage equipment and degrade performance.
Why Some Systems Are Hard to Control
Many practical systems are governed not only by equations describing how quantities change over time, but also by algebraic constraints that must be met at every instant. These so‑called descriptor systems appear in economics, power networks, mechanical linkages, and biological models. To handle their nonlinear behavior, researchers often turn to Takagi–Sugeno (T‑S) fuzzy models, which represent a complex system as a blend of simpler linear pieces valid in different operating regions. While powerful, this framework has long suffered from a technical obstacle: most control methods assumed prior knowledge about how the fuzzy “membership functions” change over time, even though these changes actually depend on the unknown future behavior of the system and its controller.
A Smoother Kind of Robust Control
Sliding mode control is a popular robust control method known for its ability to force a system quickly onto a desired path and keep it there despite disturbances. It does this by switching the control input in a way that counters uncertainty. However, the rapid switching can cause “chattering” — high‑frequency oscillations that are undesirable or even harmful in mechanical and electrical systems. The super‑twisting algorithm, a more advanced form of sliding mode control, hides the switching inside an internal process, producing a continuous control signal that keeps robustness while reducing chattering. Until now, this technique was mainly restricted to single‑input systems or required decomposing multi‑input systems into many separate controllers, which is computationally burdensome.
A New Sliding Surface Without Hidden Assumptions
The authors’ first key contribution is a new kind of “integral” sliding surface designed specifically for descriptor T‑S fuzzy systems. In simple terms, this surface is a mathematical condition involving both the present and accumulated past behavior of the system. By cleverly constructing it, the authors show they can guarantee the desired motion once the system is on this surface, without needing any prior bounds on how the fuzzy membership functions change. This removes a restrictive assumption that has limited earlier methods. The analysis uses carefully chosen energy‑like functions to prove that the system’s behavior on the sliding surface remains stable as time goes on.
A Multivariable Super‑Twisting Controller
Building on this sliding surface, the paper develops a multivariable version of the super‑twisting algorithm. Rather than designing one controller per input or per sliding variable, the method treats all of them together in a matrix form. This makes it better suited to systems where different states are strongly coupled, such as interacting species in an ecosystem or currents and voltages in a circuit. The authors derive conditions for choosing the controller’s gains so that the system states reach the sliding surface immediately and then converge in finite time. Because the control signal is continuous rather than sharply switching, chattering is suppressed by design, while robustness to disturbances is preserved.
Proving the Idea in Biology and Electronics
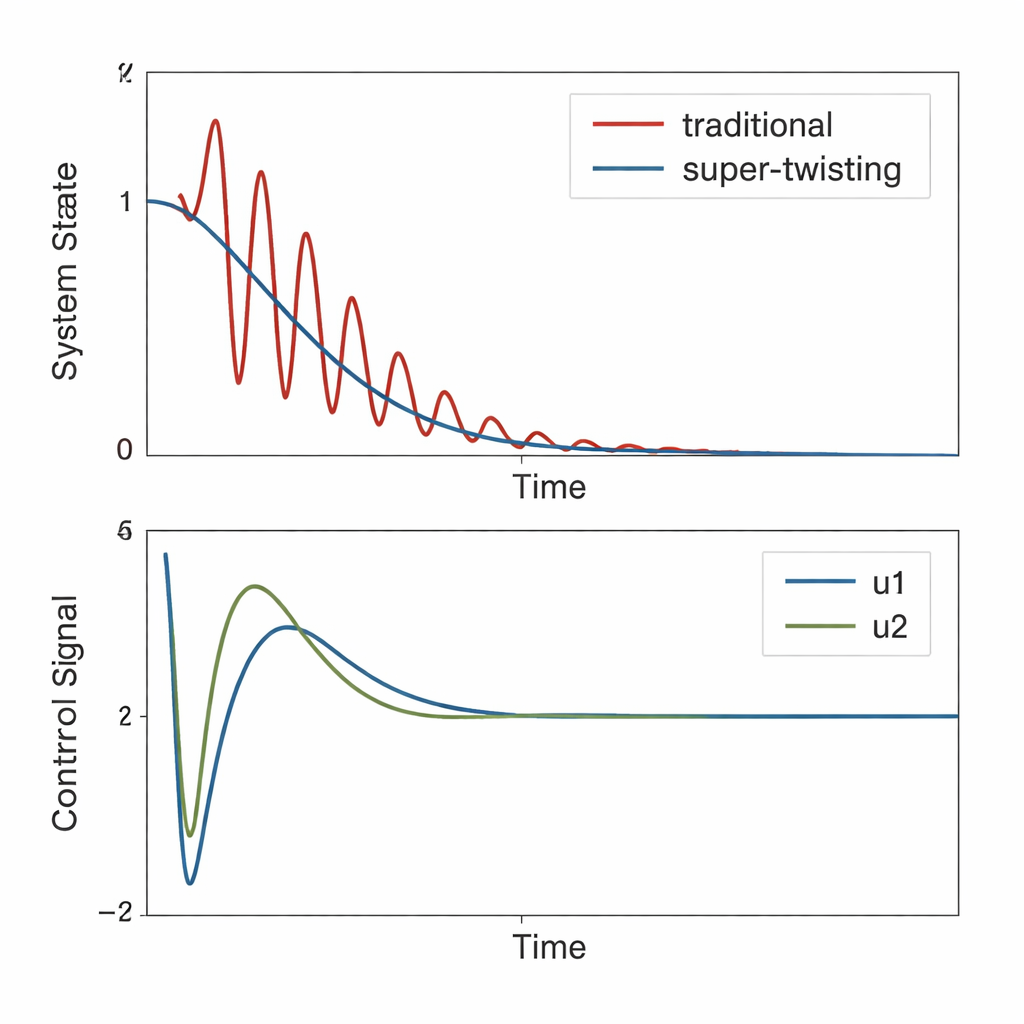
To demonstrate the practicality of their method, the authors apply it to two different nonlinear descriptor systems. The first models a bio‑economic scenario involving immature and mature populations of a species, along with a variable that captures reproductive capacity and management actions like harvesting and regulation. The second example is a nonlinear tunnel diode circuit, a classic testbed in electronics. In both cases, simulations show that the proposed controller stabilizes the system states quickly and keeps the sliding variables near zero, indicating precise tracking of the desired behavior. Compared with traditional sliding mode controllers, the new approach significantly reduces the oscillations in both the system response and the control signals.
What This Means in Practice
For non‑experts, the main message is that this work offers a way to keep complex, constrained, and uncertain systems under control without the violent switching that has plagued some robust methods. By combining fuzzy modeling, an integral sliding surface, and a multivariable super‑twisting algorithm, the authors design controllers that are both mathematically guaranteed to be stable and practically smoother in operation. This could benefit applications ranging from ecological resource management to advanced power electronics and networked control systems, especially as future work extends these ideas to cyber‑secure settings where communication can be disrupted by attacks.
Citation: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
Keywords: sliding mode control, fuzzy systems, robust control, nonlinear dynamics, super-twisting algorithm