Clear Sky Science · en
Robust model reference adaptive controller for 3-DOF planar manipulator
Smarter robot arms for tougher jobs
Factory robot arms are incredibly fast and precise, but their performance can drop whenever the real world misbehaves—loads change, parts are placed slightly differently, or unexpected forces jolt the arm. This paper explores a new way to keep a common three-joint robot arm accurate and stable even when its behavior is hard to model exactly and when strong disturbances are present, making robots more reliable partners on the factory floor.
Why three joints matter in real factories
The study focuses on a three-link planar robot: three rigid segments connected by rotary joints and moving in a flat plane. Despite its simplicity, this setup is the backbone of many industrial pick-and-place tasks, packaging lines, and assembly systems. The challenge is that the motion of one joint strongly affects the others, and the underlying equations that describe the arm’s motion are highly nonlinear and tightly coupled. Traditional controllers can work well when everything is known and predictable, but they struggle when the robot’s payload changes, when friction or mass are not modeled accurately, or when external disturbances push the arm off course.
Breaking a complex motion into simpler pieces
To tame this complexity, the authors first derive a detailed mathematical model of the robot’s motion, including how link masses, joint angles, and gravity combine to produce movement. They then introduce a key simplification: a “decoupling” strategy. Instead of treating the robot as one tangled three-joint system, each joint is modeled as if its acceleration depends mainly on its own motor torque and velocity. The leftover effects—such as interactions between joints, gravity terms, and other hard-to-model influences—are bundled together and treated as uncertainties. This decoupling allows the control problem to be split into three smaller, more manageable subsystems, one per joint, while still acknowledging that the real system is messy underneath. 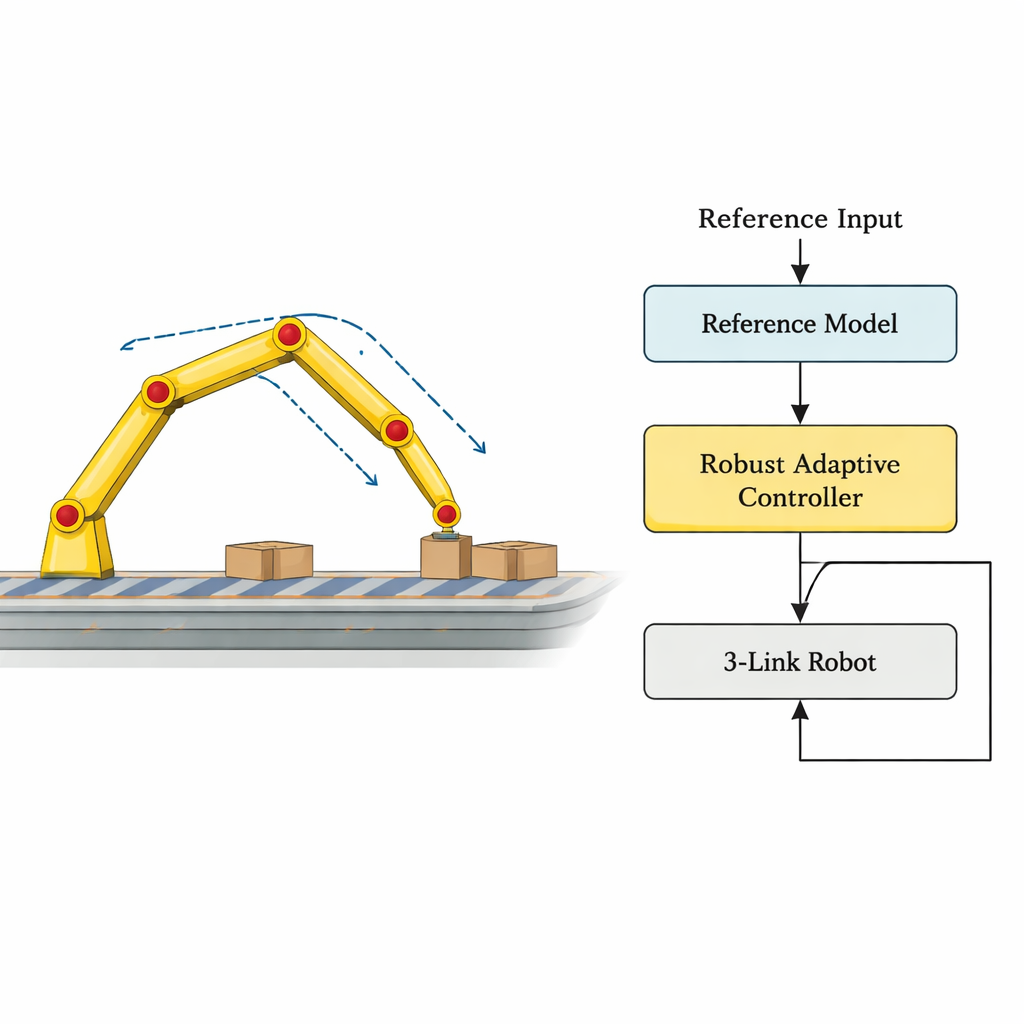
Teaching the robot to follow a moving target
On top of this simplified model, the authors build a model reference adaptive controller (MRAC). In plain terms, they first define an ideal response—a reference model that says how each joint should move over time when given a command. The controller continually compares the robot’s actual motion with this ideal and adjusts its internal gains in real time to reduce the difference. Under perfect conditions, conventional MRAC can make the robot closely follow the reference, but it has a serious weakness: in the presence of persistent disturbances or modeling errors, the adaptive gains can drift to extreme values, leading to oscillations, wasted energy, and even loss of stability. This phenomenon, called parameter drift, makes plain MRAC risky for real industrial use.
Making adaptation robust, not reckless
To avoid this drift, the paper develops several “robust” variants of MRAC that explicitly account for unknown effects. The authors add extra terms to the adaptation laws that gently pull the controller gains back toward safe bounds or scale the adaptation effort based on how large the tracking error is. Among the tested strategies—known as sigma-modification, error-modification, and an energy-aware optimal control modification—the last one stands out. Through extensive computer simulations, including fast oscillatory paths, pick-and-place motions, mass changes of 50 percent, sudden payload additions, and strong high-frequency disturbances, the robust MRAC keeps the robot’s tracking error small and the control signals smooth. In scenarios where conventional MRAC’s internal gains grow without limit, the robust versions keep them well-behaved and the arm’s motion stable. 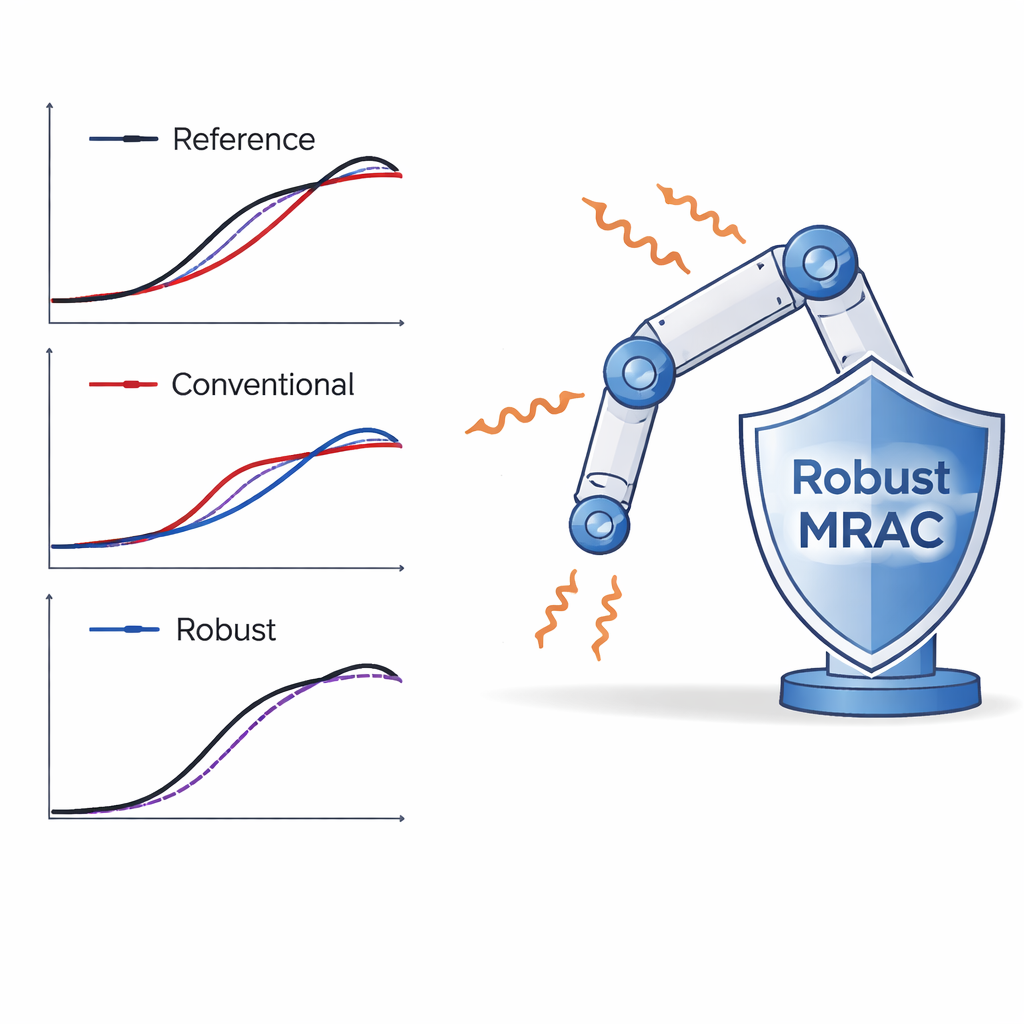
What this means for real-world robots
For a lay reader, the takeaway is that this work offers a smarter “autopilot” for industrial robot arms—one that keeps learning and adapting, but without becoming unstable when the environment or payload changes. By splitting the complex three-joint dynamics into simpler pieces and adding safeguards to the learning process, the proposed robust adaptive controller lets the robot follow desired paths accurately while using reasonable motor effort, even under disturbances and uncertainty. This moves practical robotics a step closer to truly plug-and-play systems that can be re-tasked quickly, handle unexpected conditions, and operate safely alongside humans without constant retuning by experts.
Citation: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
Keywords: robot manipulator control, adaptive control, industrial robotics, trajectory tracking, robust control