Clear Sky Science · en
An intelligent bio-inspired multi-objective and scalable UAV-assisted clustering algorithm in flying ad hoc networks
Smarter Drone Swarms in the Sky
Imagine fleets of drones working together to hunt for survivors after an earthquake, monitor wildfires, or watch over crops. To do this well, hundreds of flying robots must talk to each other quickly without draining their batteries. This paper explores how to organize such “drone swarms” so they stay connected, react fast, and last longer in the air by borrowing ideas from an unlikely source: the hunting behavior of the secretary bird.
Why Flying Networks Are Hard to Tame
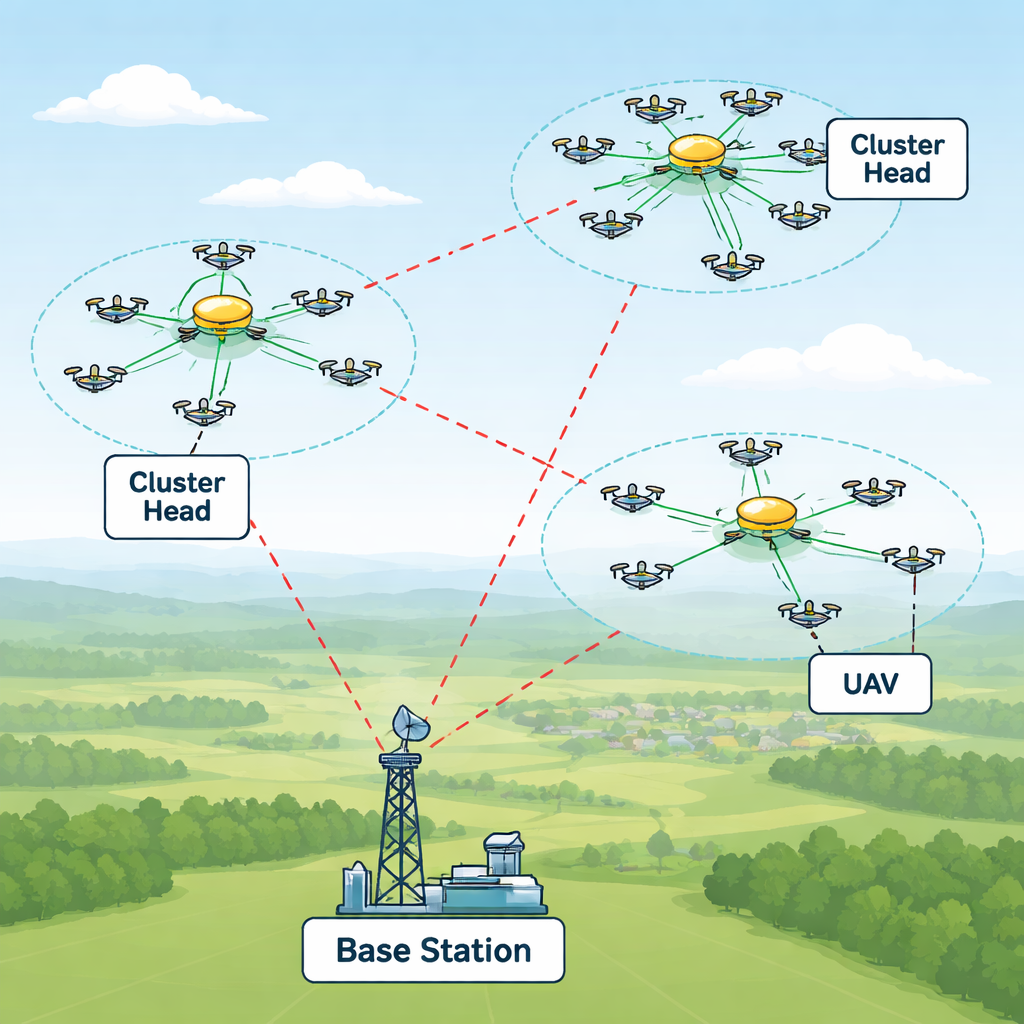
Modern drones can form what engineers call Flying Ad Hoc Networks, or FANETs—wireless webs that exist only in the sky. Unlike ground networks, these drones move in three dimensions, change direction quickly, and rely on limited battery power. If every drone tried to talk directly to every other one, signals would collide, delays would rise, and batteries would run out fast. A popular fix is to form clusters: small groups of drones led by a “cluster head” that coordinates local messages and talks to other cluster heads. But picking which drones should become leaders, and when to reshuffle those roles as the swarm moves, is a constantly shifting puzzle.
Borrowing Tricks from a Predator Bird
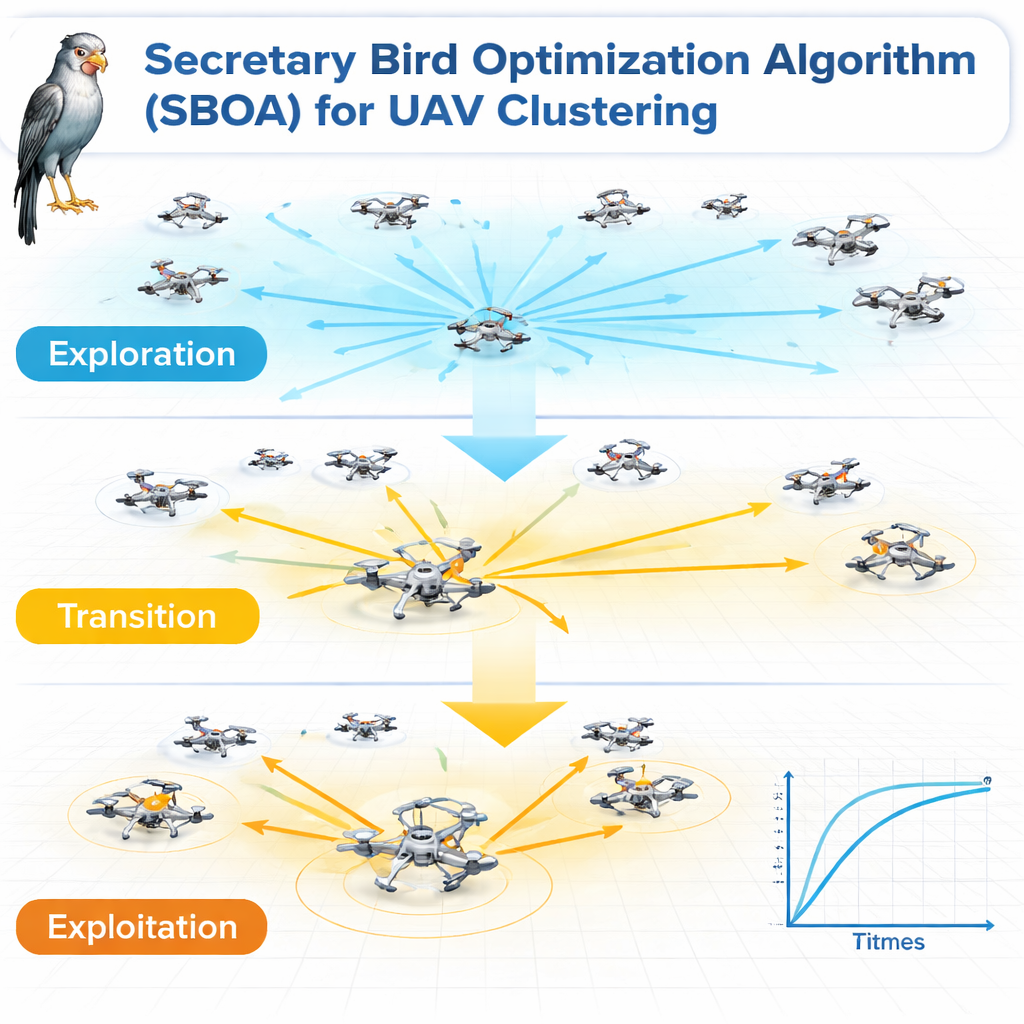
The authors turn to a bio-inspired idea called the Secretary Bird Optimization Algorithm (SBOA). Secretary birds are known for scanning wide areas, then closing in and striking their prey with precise kicks. SBOA copies this pattern in software. It starts by exploring many possible ways to assign cluster heads across the drone swarm, then gradually focuses on the most promising options. At each step, it asks three questions: Are drones inside each cluster close enough together? Do the chosen leaders still have enough battery left? And is the workload shared fairly so no leader is overloaded while others idle? By treating this as a multi-objective problem, the algorithm balances distance, energy, and fairness all at once.
Testing Drone Swarms in Virtual Worlds
To see whether this bird-inspired strategy helps, the team built detailed computer simulations. They dropped between 30 and 160 drones into 3D virtual spaces of different sizes, from one square kilometer up to a vast 15-by-15-kilometer box, and let them fly using a simple mobility model. Communication range was varied from 100 to 900 meters. For each scenario, SBOA competed against three advanced alternatives that also mimic natural behavior: Fire Hawk Optimization (FHOA), Portia Spider Optimization (PSOA), and a sperm-fertilization-based multi-objective method (MOSFP). The researchers tracked how many clusters formed, how quickly a stable structure emerged, how evenly leader duties were shared, and how much “fitness” the solutions achieved, combining distance, energy use, and balance into a single score.
What the Simulations Revealed
Across nearly all tests, SBOA came out ahead. It regularly achieved up to 15% higher fitness than its rivals, with around 10% more efficient clustering and roughly 40% better load balance among leaders. In time-based experiments, the secretary-bird approach reached a stable cluster pattern in fewer simulation frames, especially as the number of drones increased. Even in sparse, large 3D areas where drones are far apart, SBOA kept more than 85% of the best achievable fitness, indicating that it can adapt to both dense swarms and spread-out formations. Visual tools such as surface plots, t-SNE maps, and violin plots confirmed that SBOA produced tighter, more distinct clusters with less variation in leader workload than the other methods.
From Simulation to Real Missions
The study concludes that a secretary-bird-inspired strategy offers a strong recipe for managing drone swarms: it keeps drones grouped efficiently, spreads work fairly among leaders, and reacts smoothly as conditions change. For a lay reader, this means that future fleets of rescue, farming, or monitoring drones could stay connected longer, waste less battery, and respond more reliably, simply by organizing themselves better. The authors note that real-world factors—like wind gusts, GPS errors, and radio interference—still need to be tested, and they propose adding learning-based motion prediction and smarter routing next. But as a step toward robust airborne networks, SBOA shows that watching how nature hunts on the savanna can help make our robot helpers much more capable in the sky.
Citation: Aslam, Z., Rahman, T., Husnain, G. et al. An intelligent bio-inspired multi-objective and scalable UAV-assisted clustering algorithm in flying ad hoc networks. Sci Rep 16, 4870 (2026). https://doi.org/10.1038/s41598-026-35196-z
Keywords: drone swarms, wireless communication, bio-inspired algorithms, energy-efficient networking, flying ad hoc networks