Clear Sky Science · en
Explainable AI with EDA for V2I path loss prediction
Why smarter car-to-road links matter
Modern cars increasingly talk to the road around them, sending and receiving wireless messages to traffic lights, roadside units, and other infrastructure. These links help with safety warnings, traffic management, and, in the future, autonomous driving. But city streets are messy wireless environments: tall buildings, trees, bridges, and trucks can all weaken or block the signal. This paper shows how to predict that signal weakening in a way that is not only accurate, but also understandable to engineers and regulators who must trust these systems.
Seeing the data before trusting the model
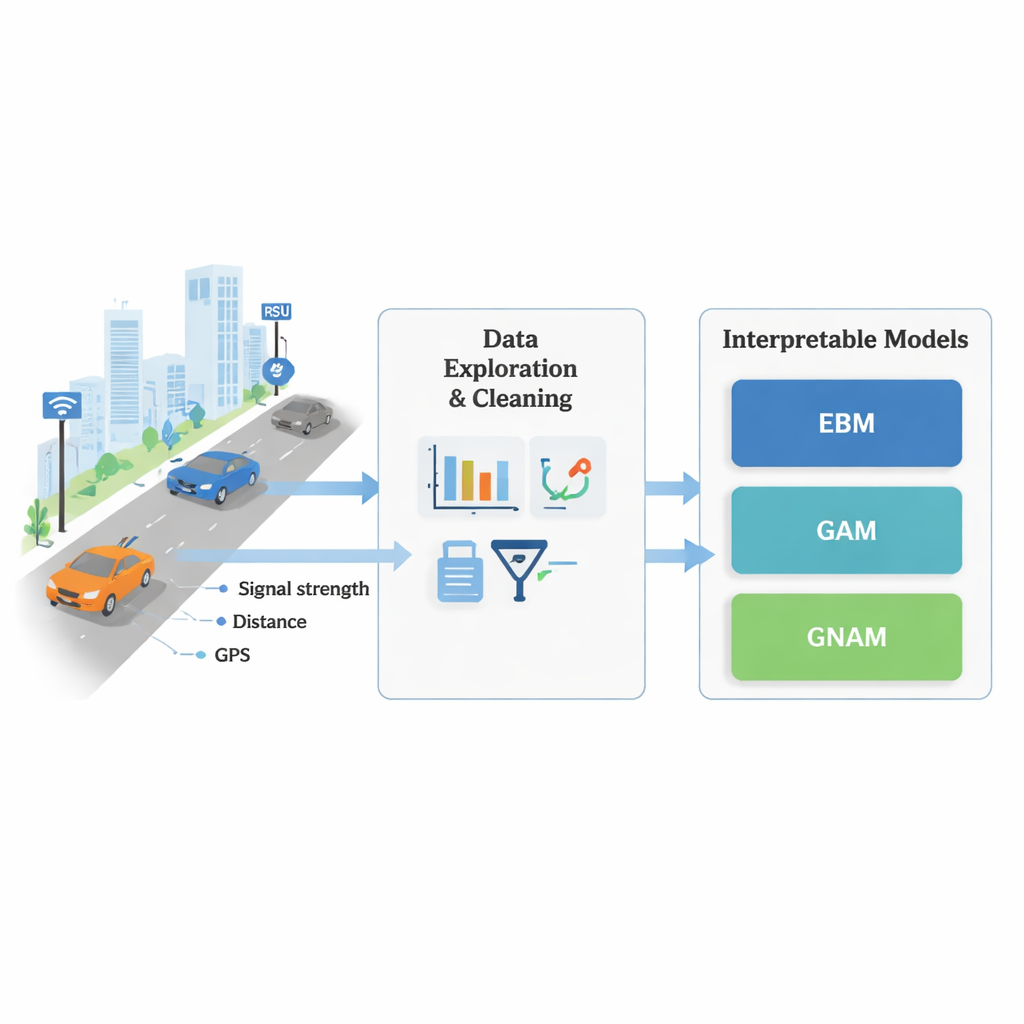
The authors start from a large measurement campaign in Bologna, Italy, where cars equipped with antennas drove through 24 different urban scenes—straight roads, roundabouts, tree-lined streets, bridges, and heavy-traffic areas—while communicating with roadside transmitters. From these measurements, they derive the “path loss,” a measure of how much the signal fades as it travels from road to car. Before building any predictive model, they perform careful exploratory data analysis: plotting distributions, checking correlations, and splitting the data into seven representative case studies such as clear line-of-sight, blocked views, and vegetation. This step reveals noise, outliers, and hidden patterns that must be addressed for trustworthy prediction.
Cleaning up real-world wireless chaos
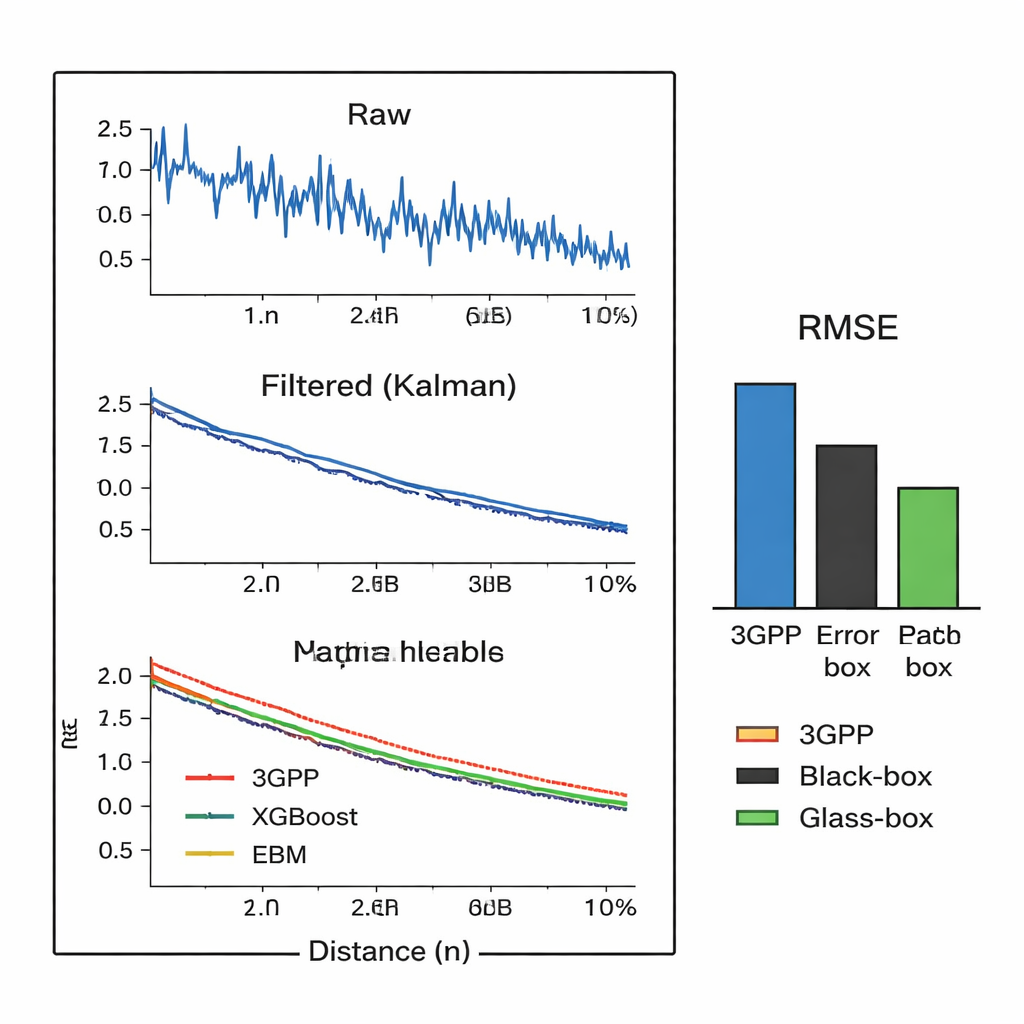
Real-world wireless data are full of irregularities caused by measurement errors, reflections from buildings, and sudden blockages by passing vehicles. The researchers design a preprocessing pipeline to tame this chaos. First, they rescale all input features—such as distance, car position, and speed—so they are comparable. Then they remove outliers using a robust statistical rule that trims extreme, inconsistent measurements. Finally, they apply an optimized Kalman filter, a classic tool from control theory, to smooth the signal over distance while preserving its underlying trends. By tuning the filter’s parameters to maximize the performance of downstream models, they show that this cleaning process can cut prediction errors by more than half and reveal stable patterns that models can learn from.
Opening the black box of AI
Traditional formulas for wireless planning, like the 3GPP and dual-slope models, are simple and transparent but often fail to capture the complexity of dense cities. On the other hand, popular machine-learning methods such as random forests and XGBoost achieve high accuracy but act as black boxes: they provide predictions with little insight into why. This paper focuses on a middle path: “glass-box” models that remain mathematically simple enough to interpret while still capturing non-linear behavior. The authors test three such models—Explainable Boosting Machines, Generalized Additive Models, and Generalized Neural Additive Models—alongside standard black-box algorithms and classical formulas, using strict train–test splits and 5-fold cross-validation across all scenarios.
What drives signal loss on real roads
By combining their cleaned data with interpretable models, the authors can pinpoint what matters most for path loss in cities. Distance between car and roadside unit unsurprisingly dominates, but the car’s precise GPS coordinates and time also contribute, reflecting how street layout and traffic patterns shape the channel. For complex scenes—like NLOS stretches behind buildings, under bridges, through tree canopies, or amid heavy trucks—the glass-box models match or slightly trail the best black-box models in accuracy, yet they clearly show how each factor nudges the prediction up or down. The study also evaluates computation time and energy use, concluding that these interpretable models are fast and light enough for real-time deployment in roadside units and on-board devices.
Building safer, more transparent vehicle networks
To a lay reader, the key message is that we can now predict how well a car will hear the road in crowded cities with both precision and clarity. Instead of relying on opaque AI that no one fully understands, this framework uses data exploration, noise filtering, and explainable models to deliver near–state-of-the-art accuracy while showing exactly which factors matter. That transparency is crucial for safety-critical Vehicle-to-Everything systems, where engineers, regulators, and even courts may need to audit decisions. The work suggests a path toward future 5G/6G car-to-road networks that are not only fast and reliable, but also accountable and easier to design, test, and trust.
Citation: Ameur, M.B., Chebil, J., Habaebi, M.H. et al. Explainable AI with EDA for V2I path loss prediction. Sci Rep 16, 4954 (2026). https://doi.org/10.1038/s41598-026-34987-8
Keywords: vehicle-to-infrastructure, path loss prediction, explainable AI, wireless channels, 5G V2X