Clear Sky Science · en
Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems
Giving Robots and Toys a Sense of Touch
Imagine a robot that can gently pick up a slice of hot toast without crushing it or burning your hand, or a toy that responds differently when you hug it, bend its ear, or warm it with your palm. This research describes a new kind of “electronic skin” that brings these ideas closer to reality by giving machines a richer, more human-like sense of touch and nearby surroundings.
Why Machines Need Better Touch
Today’s robots and gadgets are still clumsy when handling the real world. Many can only sense a single thing, such as pressure, and often rely on bulky, hand-assembled parts that are hard to scale up. Yet real human skin constantly blends many signals at once: gentle touch, firm pressure, stretching, warmth, and even a sense of how close objects are before contact. The authors of this study set out to build an electronic version of skin that can capture several of these sensations at the same time, while being thin, flexible, and easy to customize for different tasks.
Building a Thin, Flexible Sense of Touch
The team created a low-profile “e-skin” using a cleanroom-free process that can be scaled and quickly adapted. At its heart is a flexible copper circuit patterned by ultraviolet laser, which acts like the wiring in a circuit board but can bend and wrap around curves. On top and bottom of this circuit, they added a soft silicone layer full of tiny air pores, much like a sponge. The outer surfaces are coated with a thin film of carbon nanotubes, forming a conductive shell that both protects the device from electrical noise and serves as a common reference layer for sensing. This stack lets each sensor pad behave like a tiny electrical capacitor whose value shifts when the material is pressed, bent, heated, or brought close to an object. Additional tiny chips mounted on the same flexible circuit measure temperature and distance without contact, so the whole sheet mimics not only skin’s pressure and stretch receptors but also a sense of warmth and near vision. 
How the Sensors Feel Pressure and Motion
The pressure and bending parts of the e-skin are designed to react strongly to small changes while remaining durable. When something presses down, the pores in the soft layer compress, bringing the internal metal layers closer together and replacing air with more silicone. Both effects raise the electrical signal, especially at low pressures where the material is easiest to squeeze. Tests showed that the e-skin can detect very gentle touches, down to a few dozen pascals, with quick response and little drift even after ten thousand press-and-release cycles. When the sheet bends, it folds around the inner wiring, again shrinking the gap between layers on one side and boosting the signal. The response grows more noticeably at larger bend angles, matching how real-world bends tend to localize in one area rather than spreading evenly. Overall, the design balances softness, stability, and sensitivity without the complex stacked structures used in many earlier devices. 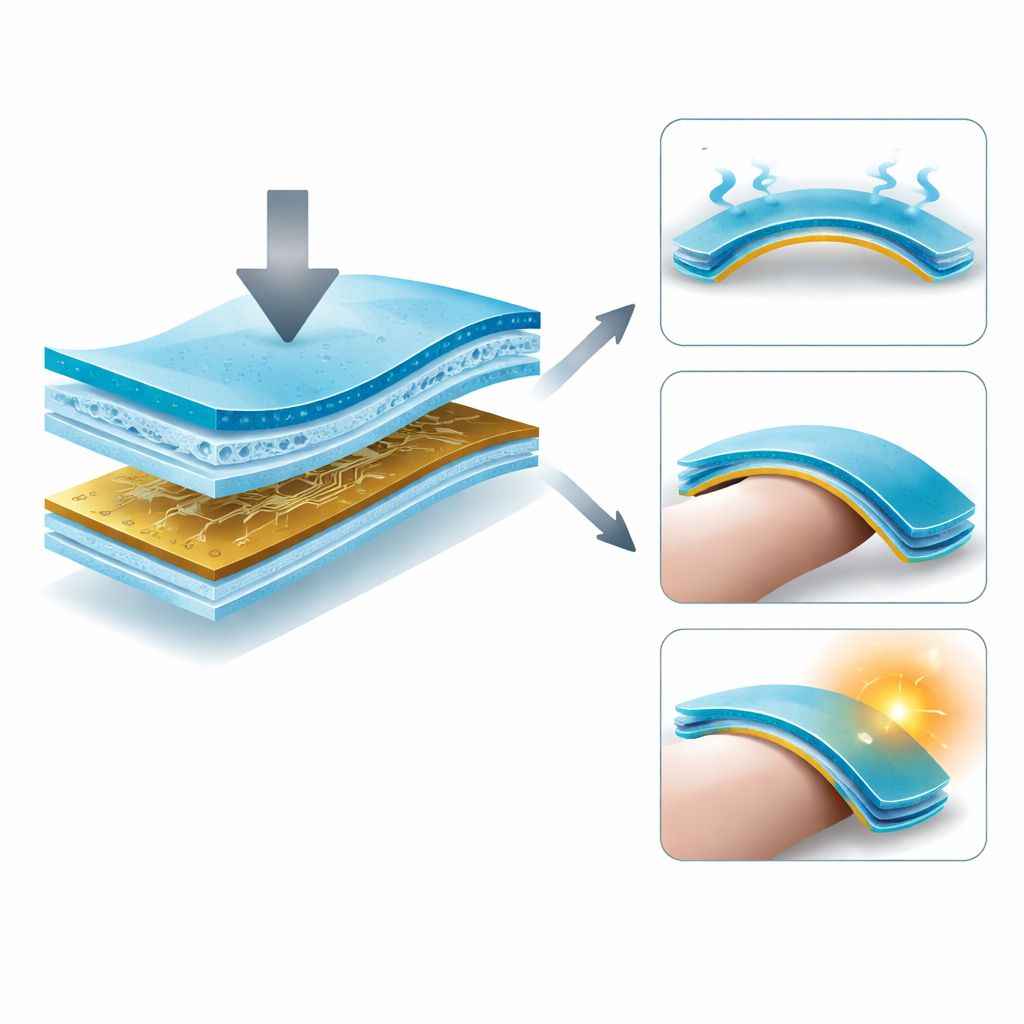
From Kitchen Robots to Playful Companions
To show what this e-skin can do, the researchers wrapped it around a robotic gripper and gave the robot a cooking-style task. As the gripper moves toward a hot piece of bread, a tiny depth-sensing module embedded in the skin first maps how far away the object is, helping the robot line up its fingers before touching. Once in contact, the pressure and bending sensors guide how firmly it squeezes, preventing slips or crushed bread. A temperature sensor on the same sheet checks when the bread has cooled enough to be safely passed to a person. In another example, the team built a soft elephant toy covered with e-skin. Pressing its chest changes the rhythm of a hidden vibration motor to feel like a heartbeat, bending an ear triggers sound, and the warmth of a hand can light up the toy’s cheeks, turning touch into a playful, emotional interaction.
Seeing Patterns of Pressure Across a Surface
Beyond individual spots, the same fabrication method can form large pressure-sensing arrays that read out where and how strongly a surface is being touched. The team demonstrated an 8-by-15 grid that works like a pressure camera: as fingers, weights, or stamped shapes press down, the system reconstructs the force pattern and even identifies outlines such as letters. This ability to capture pressure maps and centers of mass could help robots balance loads, recognize objects, or act as smart weighing platforms and interactive surfaces. Because the underlying process is fast and modular, designers can tune the size, spacing, and softness of the sensing pixels for different uses, from smart furniture to posture-monitoring mats.
What This Means for Everyday Technology
By combining multiple sensing modes—pressure, bending, warmth, and proximity—into a single, thin, and easily customized sheet, this work brings electronic skin much closer to the subtle capabilities of human skin. While there is room to improve performance at very high pressures and to automate some assembly steps, the approach already shows that rich touch can be added to robots, toys, and other devices without heavy, hand-built hardware. In practical terms, this could lead to home robots that handle fragile items more safely, medical wearables that track body contact more comfortably, and interactive products that respond to our touch in far more natural ways.
Citation: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
Keywords: electronic skin, tactile sensing, flexible sensors, robotic gripper, interactive devices