Clear Sky Science · en
Comparison of clinostat control strategies to achieve simulated microgravity with uniform gravity vector distribution
Why Earth Scientists Care About Weightlessness
Space changes living things in surprising ways, from weakening bones and muscles to altering immune cells. To understand these effects, researchers need to expose cells, plants, and small animals to weightlessness for hours, days, or even weeks. But real spaceflight is expensive and rare. This paper explores how to make a tabletop machine called a clinostat better at mimicking microgravity here on Earth, so that lab experiments can more faithfully stand in for those done on the International Space Station.
Spinning Our Way to Fake Weightlessness
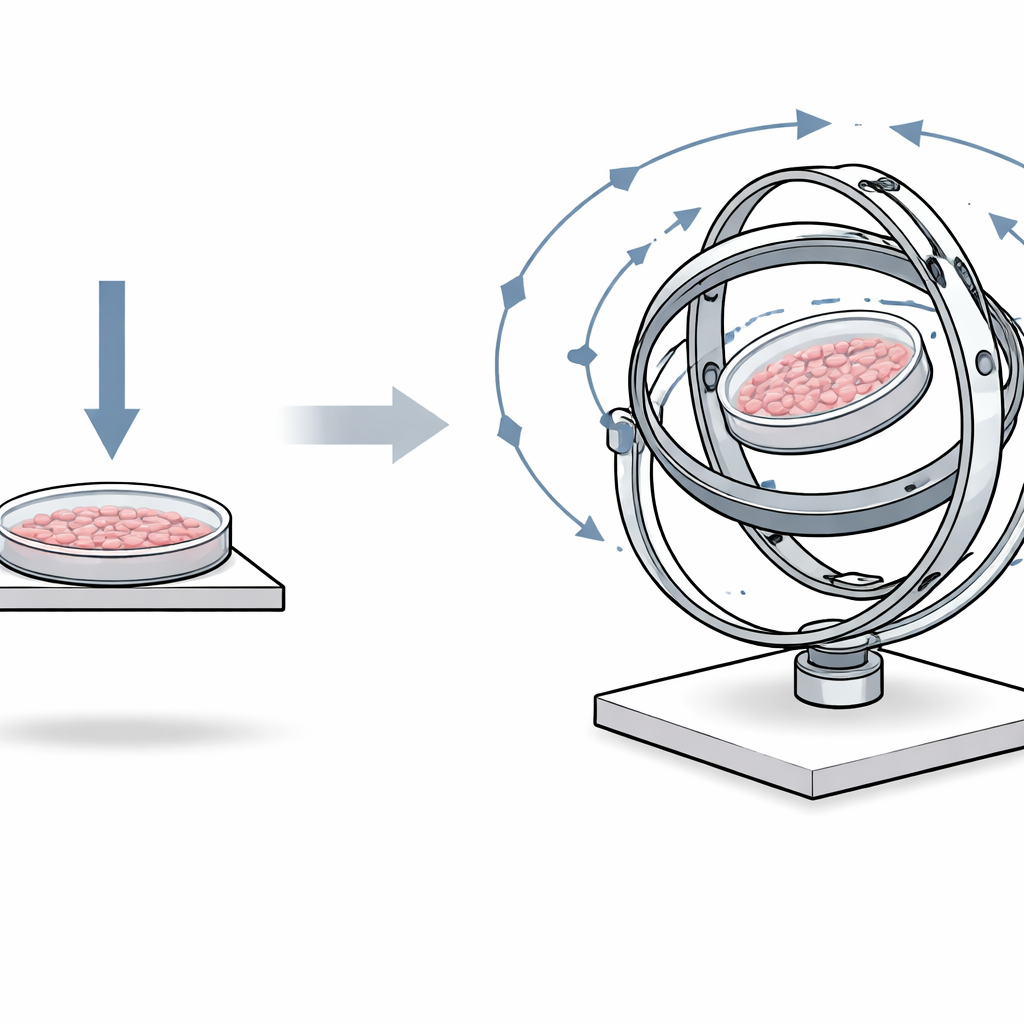
A clinostat tries to “turn off” gravity not by removing it, but by constantly changing the direction from which it pulls. Samples are mounted on a small inner platform that is rotated by two perpendicular motors. As the platform tips and turns, the direction of gravity, seen from the sample’s point of view, sweeps across all possible angles. Over time, these changing pulls can average out to an almost zero net effect, a state known as time-averaged simulated microgravity. Past work has shown that cells and plants in such conditions can behave very much like they do in real spaceflight, making clinostats valuable tools for space biology.
The Hidden Problem of Gravity Hot Spots
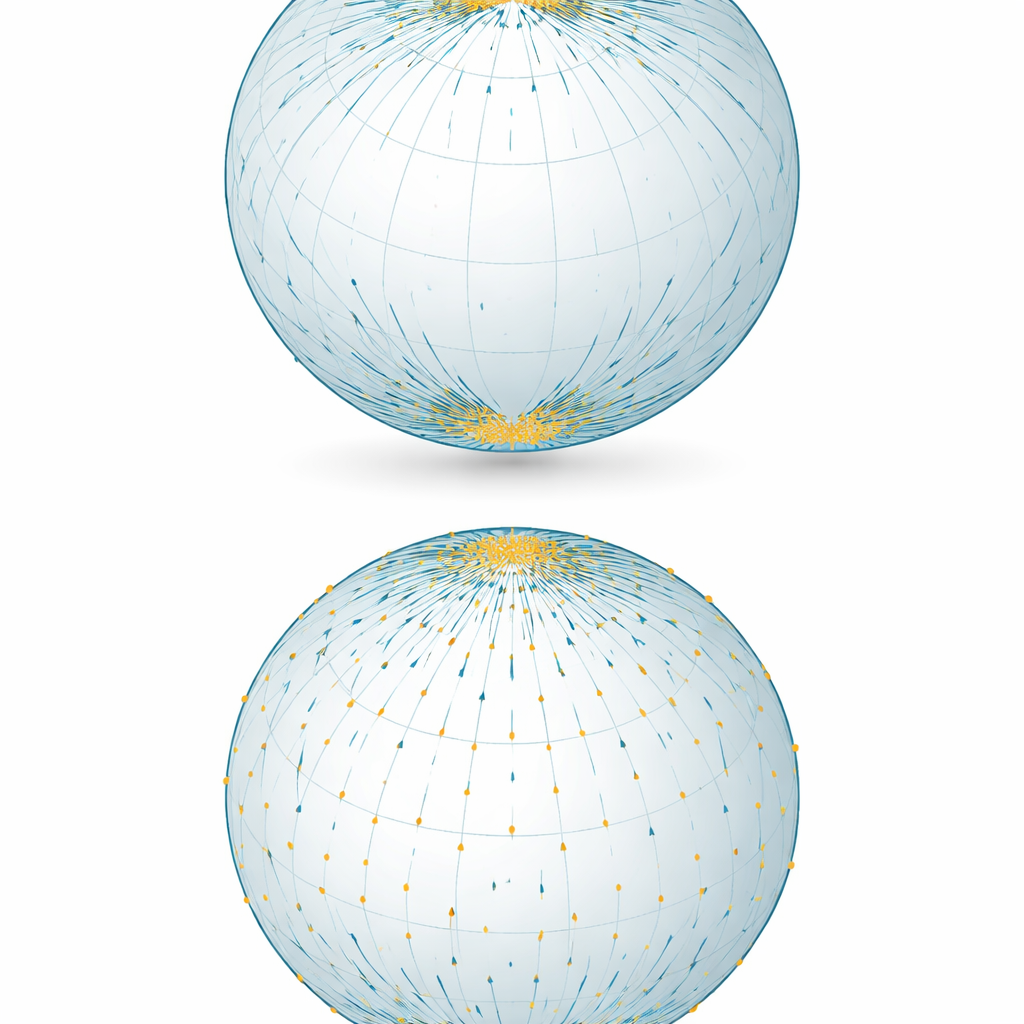
However, there is a catch. Because of the geometry of the rotating frames, the apparent gravity direction does not spread out evenly over all angles. When the outer motor spins at a constant speed, the gravity direction spends too much time near two opposite regions on the imaginary sphere that represents all orientations. These “poles” become gravity hot spots. Even if the average pull over many hours is close to zero, the sample repeatedly feels gravity coming more often from just two directions, instead of from all directions equally. Many clinostat studies either overlooked this issue or tried to fix it by randomly changing rotation speeds, but the authors show that randomness alone does not cure the problem.
Designing a Smarter Spin Pattern
The team compared four ways of driving the clinostat’s outer motor: a constant speed, speeds picked at random within a range, a simple sinusoidal pattern that speeds up and slows down with angle, and a specially crafted “reciprocal sinusoidal” pattern based on the exact way surface area changes over a sphere. Using computer simulations, they tracked where the gravity direction landed over time and defined two numerical yardsticks: how concentrated it was inside the pole regions, and how evenly it was spread across different “latitude” bands on the sphere. They also measured how long each strategy took to bring the time-averaged gravity below one-thousandth of Earth’s gravity, a common standard for simulated microgravity experiments.
Flattening the Poles Without Losing Microgravity
The results were clear. Both the constant-speed and random-speed strategies produced strong poles: the gravity direction was up to about fifteen times denser near the poles than on average. The random approach did break up simple repeating paths but left the overall non-uniformity almost unchanged. The simple sinusoidal pattern helped somewhat, but when the difference between its minimum and maximum speeds was increased to reduce the poles, it pushed the gravity distribution too far the other way, making some mid-latitude regions under-sampled and low-latitude regions over-sampled. In contrast, the reciprocal sinusoidal pattern—where the motor moves faster near the poles and slower near the equator, in just the right mathematical way—shrank the pole concentration to nearly uniform levels when the ratio between maximum and minimum speed was sufficiently high. Although this strategy made the time to reach very low average gravity somewhat longer (around six hours and then no faster), that delay is minor for typical experiments that run for twelve hours or more.
Putting the Theory to a Real-World Test
To see whether these gains held up outside the computer, the authors built a two-axis clinostat using off-the-shelf servo motors and sensors. They drove the outer motor with the reciprocal sinusoidal speed pattern at several speed ratios and recorded the system’s motion in two independent ways: by reading the motor encoders and by measuring orientation with an inertial sensor mounted on the spinning inner stage. Both methods closely matched the simulations, with only a few percent difference. As the ratio between maximum and minimum speed increased, the observed gravity poles weakened just as predicted. The time-averaged gravity in the real machine did not quite reach the strict target of one-thousandth of Earth’s gravity because of small mechanical imbalances, but the behavior over the first few hours still mirrored the theoretical trend.
What This Means for Future Space Biology on Earth
For researchers who rely on ground-based surrogates for spaceflight, the message is straightforward: how you spin a clinostat matters as much as how fast you spin it. Simply turning at a constant speed, or jittering the speed at random, leaves hidden gravity hot spots that may influence how cells and tissues respond. By carefully shaping the rotation so the platform skims quickly past the pole regions and lingers where surface area is larger, experimenters can give their samples a much more even taste of all possible “down” directions. The study suggests that adopting this reciprocal sinusoidal control strategy will make clinostat experiments more faithful stand-ins for life in orbit, without adding extra mechanical complexity or drastically lengthening experiment times.
Citation: Kim, Y.J., Park, S. & Kim, S. Comparison of clinostat control strategies to achieve simulated microgravity with uniform gravity vector distribution. npj Microgravity 12, 21 (2026). https://doi.org/10.1038/s41526-026-00570-8
Keywords: simulated microgravity, clinostat, gravity vector distribution, space biology, control algorithms