Clear Sky Science · en
Fast-swimming biohybrid OstraBot with self-trained high-strength muscles
Muscle-Powered Robots Take the Plunge
Imagine tiny swimming machines driven not by electric motors, but by living muscle grown in the lab. This study shows how researchers taught engineered muscle to train itself into a much stronger “engine,” then used it to power a miniature fish-like robot that swims faster than any previous skeletal muscle–driven machine. The work hints at future soft robots that are efficient, adaptable, and partly alive.
Why Biohybrid Muscles Matter
Robots usually rely on rigid motors or air-powered pistons. These work well, but they can be heavy, noisy, and poorly matched to the soft, flexible motions of living creatures. Engineered muscles, on the other hand, run on simple nutrients, repair themselves to some extent, and can adapt as they are used—much like our own bodies after exercise. The problem has been power: lab-grown skeletal muscles, especially those made from widely used C2C12 cells, typically produce too little force to move robots quickly or carry much load. Most past devices have crawled or swum slowly because their muscle “motors” were simply too weak.
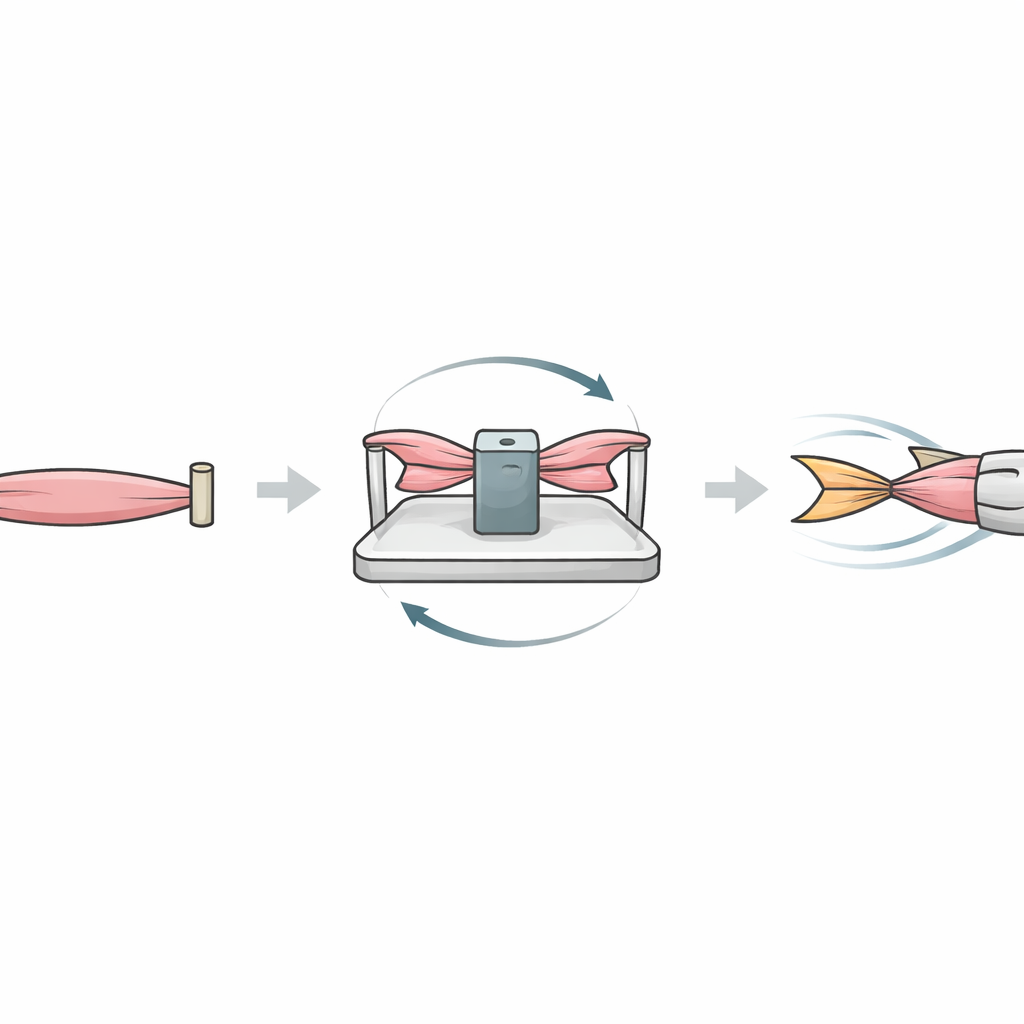
A Self-Training Gym for Living Tissue
The researchers solved this by giving muscle tissue its own built‑in workout regime. They molded ring-shaped muscle constructs from C2C12 cells embedded in a soft gel, then moved pairs of these rings onto a custom device inspired by arm wrestling. Each muscle ring was anchored at one end and connected at the other to a shared sliding block, so that when one muscle contracted, it stretched its partner, and then the roles reversed. Crucially, early in their development these tissues naturally twitch on their own, even without electrical stimulation. The device converted this spontaneous twitching into continuous back‑and‑forth training cycles, lengthening and shortening both muscles thousands of times without any human intervention or external machinery.
Building Stronger, More Durable Muscle Engines
To see whether this self-training really mattered, the team compared three ways of maturing muscle: a very soft support that allowed motion but little resistance, a very stiff support that held length but barely moved, and their paired self-training platform. Under the microscope, the self-trained muscles developed thicker, more aligned fibers with clear internal banding patterns associated with mature muscle. Force measurements confirmed the visual difference: self-trained tissues generated about seven millinewtons of force—several times higher than muscles grown on conventional platforms and the highest yet reported for this cell type in robots. They also maintained strong contractions for weeks, suggesting that the workout not only bulked up the tissue but also helped it stay functional over time.
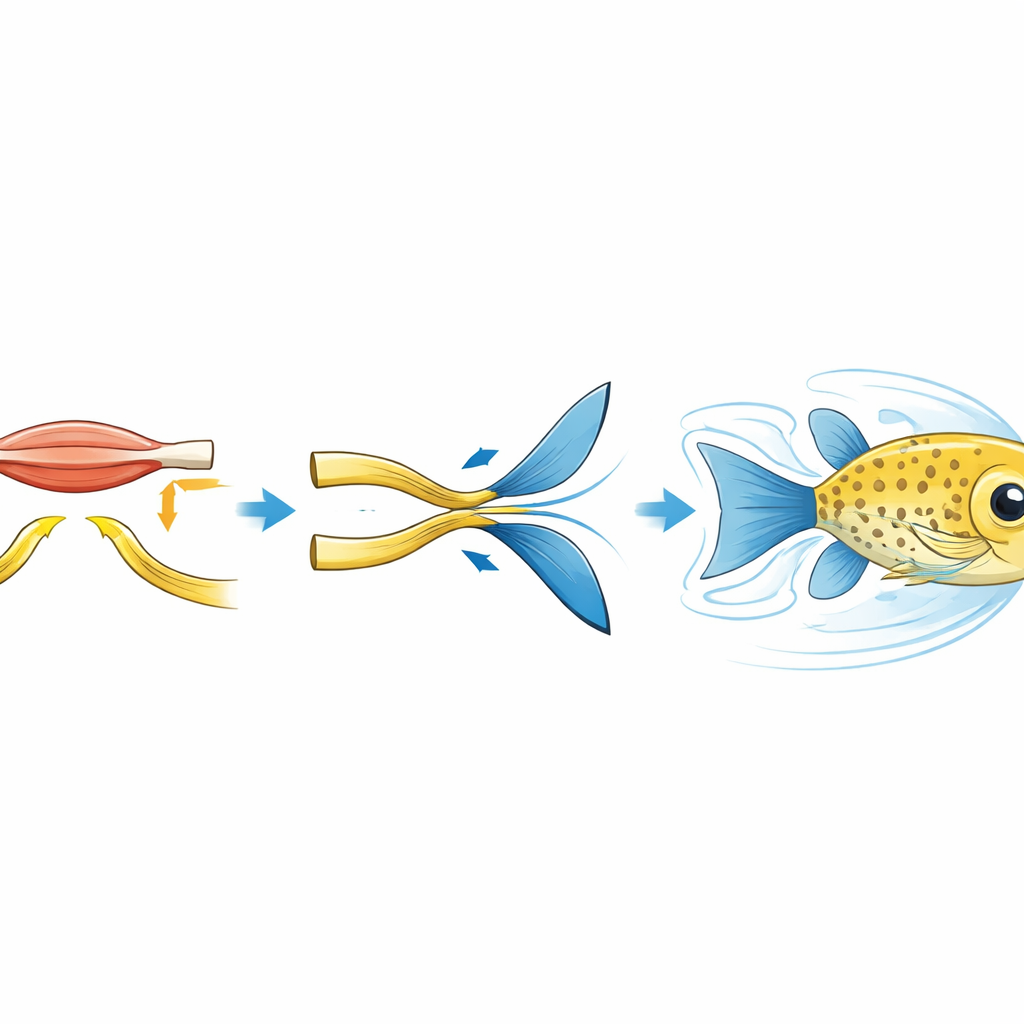
Designing a Fast Boxfish-Inspired Swimmer
Armed with stronger muscle, the researchers set out to build a small swimming robot they call OstraBot, modeled on the boxfish style of motion. In this swimming mode, the body stays mostly rigid while propulsion comes from side or rear tails that flap back and forth. OstraBot’s body is a lightweight 3D‑printed float, its “tendons” are flexible beams that transmit force, and its twin tails act as paddles. When the muscle strip contracts under electrical stimulation, it bends the tendons, which in turn wag the tails and push water backward. To get the most from their living engine, the team built a mathematical model that links how the muscle contracts to how the robot moves. By treating the tendons like springs and the surrounding water like a damping force, and by including biologically realistic muscle behavior, they could predict which combinations of tendon stiffness and stimulation frequency would yield the most mechanical work and thus the greatest swimming speed.
Tuning the Sweet Spot for Speed and Control
The model revealed a “Goldilocks” zone: tendons that were too stiff barely bent and wasted the muscle’s strength, while tendons that were too soft flexed a lot but did not push effectively against the water. Intermediate stiffness, paired with a moderate beat frequency, allowed the muscle to do maximal useful work each cycle. Experiments confirmed these predictions. Robots with medium‑stiff tendons swam far faster than those with soft or stiff ones, reaching speeds of about 467 millimeters per minute, or more than fifteen body lengths per minute—a record for skeletal muscle–driven biohybrid swimmers. The team could further tune speed by adjusting either how often they pulsed the muscle or how strong the electric field was, and even demonstrated clap-controlled start‑and‑stop behavior using a sound-triggered circuit. When disturbed or pushed backward, the robot quickly recovered and resumed forward motion, thanks to its strong muscle thrust and well-matched mechanics.
What This Means for Future Living Machines
For non-specialists, the key message is that living muscle can now be trained and engineered to rival, and potentially surpass, many synthetic soft actuators in strength and responsiveness. By letting tissues exercise themselves through a clever mechanical setup, and by using a realistic model to guide the robot’s design, the researchers overcame a major performance barrier in biohybrid robotics. Their approach could be extended to other cell types, larger systems, and more complex machines, opening a path toward soft robots that are efficient, adaptable, and deeply inspired by the way real animals move.
Citation: Chen, P., Wang, X., Zhou, J. et al. Fast-swimming biohybrid OstraBot with self-trained high-strength muscles. Nat Commun 17, 2246 (2026). https://doi.org/10.1038/s41467-026-70259-9
Keywords: biohybrid robots, engineered muscle, soft robotics, swimming microrobots, tissue engineering