Clear Sky Science · en
Hand-like autonomous flying robot for airborne grasping and interaction
Flying helpers you can almost shake hands with
Imagine a small flying robot that can not only film your surroundings but also open a door, pass you a drink, or pluck a package from a hard‑to‑reach shelf. This study introduces exactly that kind of device: a compact drone whose body doubles as a hand. By blending ideas from bird flight and human grasping, the researchers show how airborne robots could move beyond passive watching to become active helpers in homes, factories, and search‑and‑rescue scenes.
From flying cameras to flying hands
Most drones today are “flying eyes” used for photography, mapping, or inspection. When engineers try to add robot arms so drones can grab or push things, the machines quickly become bulky, heavy, power‑hungry, and hard to control—especially indoors or near people. The authors tackle this problem by rethinking the drone’s body itself. Instead of bolting on a separate arm, they design the entire frame to act like a hand that can wrap around objects, perch on poles or trees, and still fly nimbly through tight spaces.
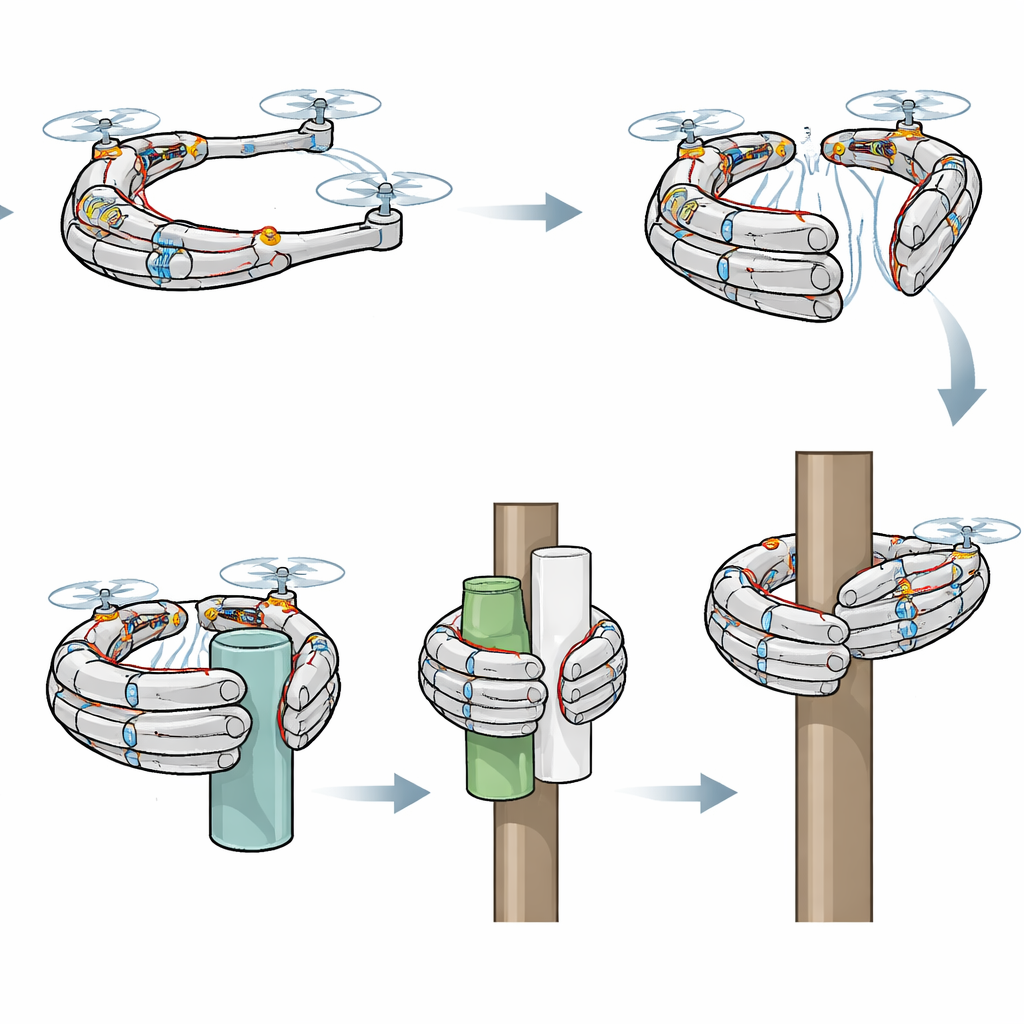
A hand-shaped flying body
The new robot, called HI‑ARM, is about the size and weight of an adult hand. Its frame forms an open C‑shape that resembles a curved palm with fingers. Inside this ring are telescoping segments and twisting joints, driven not by many motors but by a single tendon‑like cord pulled by one servo. Springs let the structure bend and then spring back to its original shape, storing and releasing energy much like muscles and tendons do. This underactuated design allows the robot to adjust itself around unknown objects: as the cord tightens, different parts compress and twist until they naturally conform to whatever is being grasped.
How the robot thinks and flies
To make this morphing body useful, the team builds a layered “brain” for the robot. One part plans where the drone should fly and when it should grasp, open, or perch, drawing from a library of basic actions like “grab,” “release,” or “perch on pole.” Another part translates these plans into smooth paths in space that the drone can follow in real time. A fast control system then constantly estimates the robot’s position, the shifting location of its center of gravity as it deforms, and the extra forces when it picks up or pushes against objects. Adaptive algorithms sense these disturbances and automatically boost or rebalance the thrust of the four propellers so that flight remains stable even while the body is squeezing a bottle or pushing a door.
What this flying hand can do
In indoor tests, HI‑ARM performs familiar human-like actions. It uses its “palm” to grasp and carry a full water bottle along a precise flight path, and its “fingertips” to pinch and lift a single thin napkin—an especially delicate task for a machine. The same mechanism adapts to toys, boxes, bags, and oddly shaped blocks without needing to know their shapes in advance. The robot can fly up to a tree trunk or pole, clamp around it, shut off its propellers, and simply hang there, using far less power than hovering. It can also approach a door, wrap around the handle, and swing the door open while keeping itself balanced despite the push‑back forces.
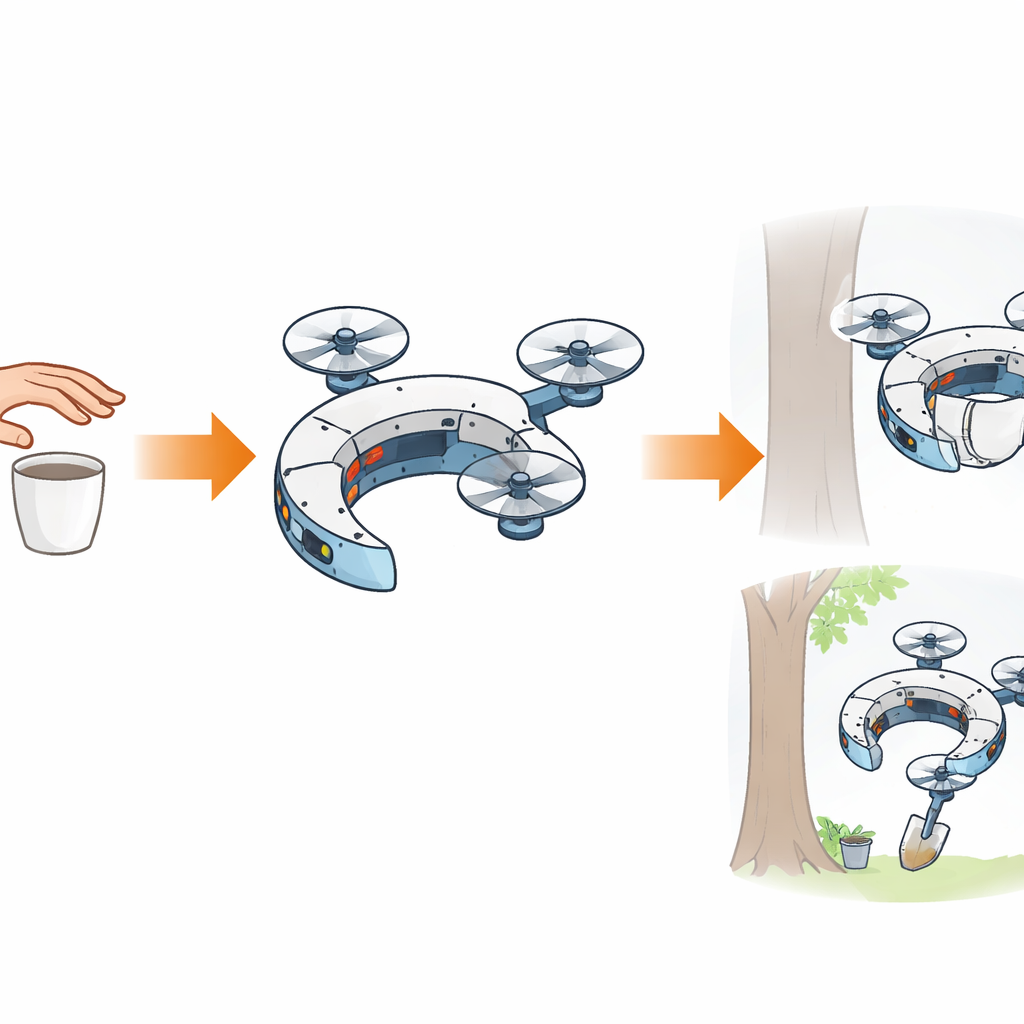
Helping people and working outdoors
The researchers also explore how such a device could interact with people. In a home‑like scene, the drone takes a parcel from a person’s hand, puts it away, fetches a drink from a table, hands it over, later collects the empty bottle, and finally perches on a coat rack to wait for the next task—all in one continuous, smooth sequence. Using video goggles and a simple one‑handed controller, a person with limited mobility remotely guides the robot to pick up a cup of coffee from outdoors and bring it back over a distance of tens of meters. In outdoor trials, the drone perches on bamboo and poles, squeezes through a narrow rock opening by shrinking its body, and carries a drink across a river, hinting at roles in delivery, inspection, and rescue.
What this means for everyday life
The work shows that a small, hand‑shaped flying robot can combine nimble flight with surprisingly human‑like ways of grasping, perching, and interacting with objects and people. By tightly integrating the body design, motion planning, and adaptive control, the authors overcome many of the size and stability problems that have held back earlier aerial manipulators. While future versions will need better onboard vision and smarter decision‑making to operate fully on their own, this study points toward a future where “flying hands” may help deliver packages, assist people with disabilities, maintain infrastructure, and perform delicate tasks in places that are awkward or dangerous for humans to reach.
Citation: Wu, Y., Yang, F., Jin, R. et al. Hand-like autonomous flying robot for airborne grasping and interaction. Nat Commun 17, 2200 (2026). https://doi.org/10.1038/s41467-026-68967-3
Keywords: aerial manipulation, flying robot hand, drones, human-robot interaction, biomimetic robotics