Clear Sky Science · en
Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps
Robots That Can Jump Like They’re on the Moon
Imagine a rescue robot that can spring over walls, leap across streams, or dive through a moving window without missing its landing spot by more than a centimeter. This paper describes a new kind of jumping machine that does exactly that by briefly giving itself “low gravity,” much like being on the Moon or Pluto, while keeping its leaps precise and predictable.
Why Jumping Robots Struggle Today
Animals such as bush crickets or frogs can leap far, land on narrow perches, and adjust midair when something changes. Most robots cannot. Traditional jumping robots face a trade-off: they can either jump very far using strong springs or motors, or they can land precisely and safely, but rarely both. Spring-loaded “catapult” designs store a lot of energy but are slow to recharge and hard to control once they are in the air. Direct motor-driven legs are easier to control but lack the burst of power needed for very high jumps. Add-on wings or rotors can extend airtime, but they often make the flight path messy and unpredictable, which is a problem if you must hit a small target or dodge moving obstacles.
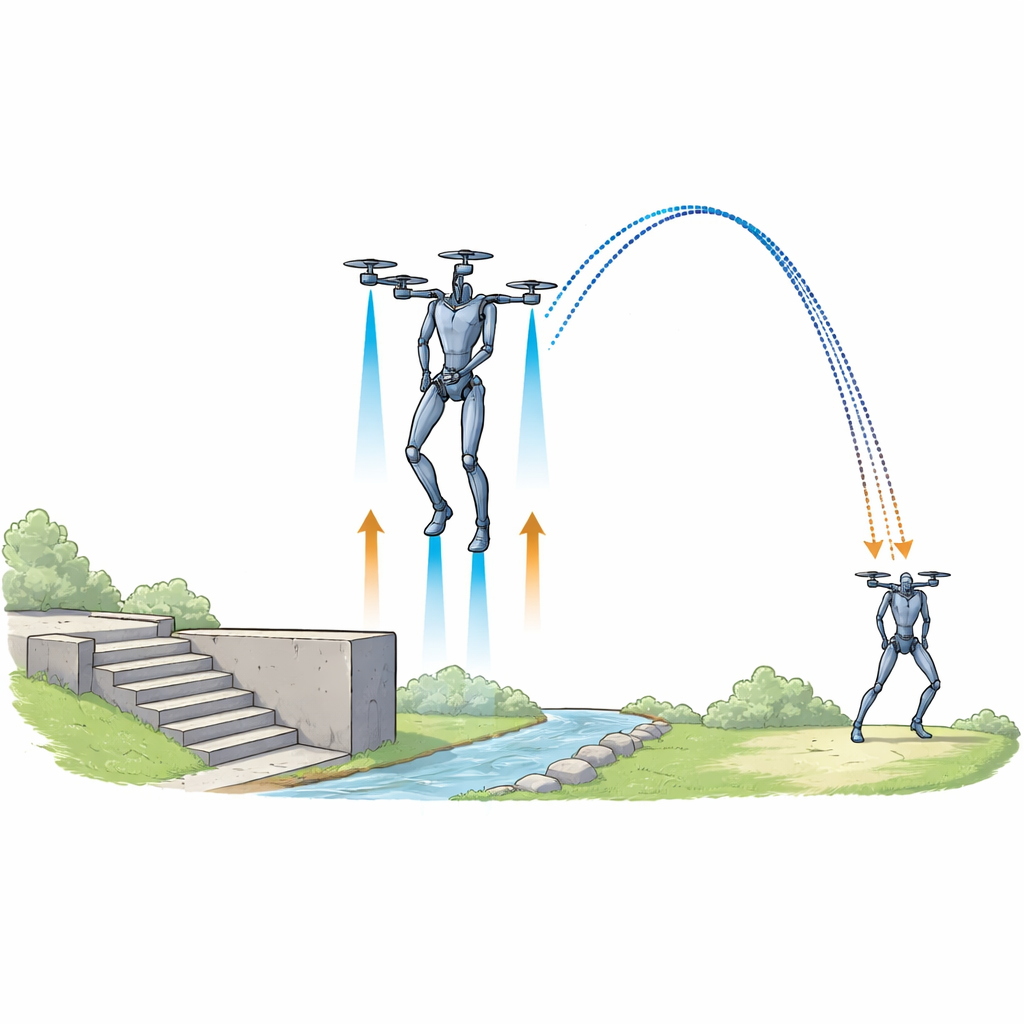
Faking Low Gravity With Air Thrust
The researchers built a 370-gram bipedal robot called GravOff that sidesteps this trade-off by creating its own low-gravity environment. The robot has a pair of long, insect-like legs driven directly by motors, plus four small propellers mounted on a wide frame. During a jump, the legs provide a quick shove off the ground to reach a high takeoff speed. At the same time, the propellers push upward just enough to cancel part of Earth’s gravity, a condition the authors call thrust-induced hypogravity. Because the “effective gravity” is lower, the same leg power sends the robot along a much higher and longer arc—up to 6.9 meters in height, about 46 times its body height—comparable to the best record-setting jumpers but with gentler takeoff and landing speeds.
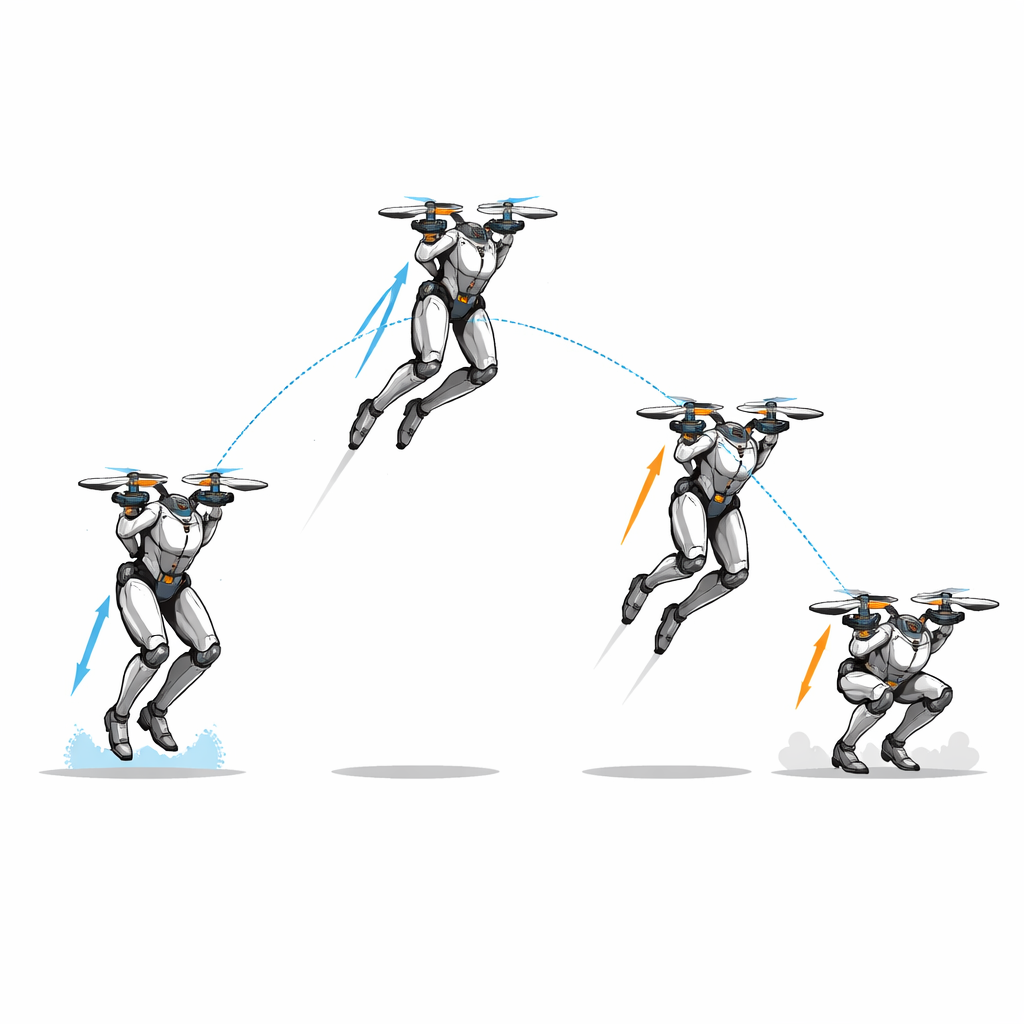
Drawing and Steering the Perfect Arc
What makes GravOff especially unusual is not just how far it jumps, but how precisely it follows a chosen path. The team treats each leap as a time-stamped arc, where position and timing are locked together like points on a drawn parabola. Using sensors and a predictive control algorithm, the robot compares its actual midair motion to this reference curve dozens of times per second and slightly tilts its rotors to nudge itself back on course. Crucially, the propellers can swivel independently of the robot’s body tilt, so the robot can aim its thrust without having to lean its whole frame, keeping balance and steering separate. This dual control lets GravOff land inside a square only 25 centimeters on a side with millimeter-level repeatability, even when the takeoff angle is off by as much as 15 degrees or when a strong fan blasts it with 3.5-meter-per-second wind during flight.
Soft, Stable Landings Without the Bounce
High jumps usually mean hard landings, which can damage hardware or send a robot tumbling. GravOff tackles this with two landing modes. For especially hard impacts, a soft 3D-printed shock absorber in each leg helps soak up energy. For precise landings on small or moving targets, the robot actively pulls its legs in and then re-extends them at just the right moment, stretching out the contact time with the ground. This “active damping” cuts impact forces by a factor of four compared with passive landing and nearly cancels the incoming momentum, so the robot stops on its first touchdown instead of bouncing away.
From Lab Jumps to Real-World Missions
Beyond controlled indoor tests, the authors show that GravOff can combine jumping with crawling and wheeling to handle real terrain. It can crawl slowly over grass, sand, cobbles, and grooved pavement to line up a safe takeoff pose, then use hypogravity jumps to clear obstacles such as multi-step staircases, a 2.35-meter-high wall, or a three-meter-wide stream. The low-gravity jumping strategy also proves far more energy efficient than pure flight for clearing medium-sized obstacles: in some tests, jumps used less than one-tenth of the total energy required by hovering or flying over the same barrier.
What This Means for Future Robots
In simple terms, this work shows that robots can jump farther, more accurately, and more safely by pretending that gravity is weaker and by adjusting their flight path after takeoff. GravOff’s design hints at future explorers that could hop across rubble during disaster response or traverse cliffs and craters on other planets, all while predicting exactly where and when they will land. The same ideas—offsetting gravity with thrust and steering the arc mid-flight—could be added to many other jumping robots, potentially turning leaping into a reliable, plan-ahead mode of travel rather than a risky last resort.
Citation: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
Keywords: jumping robots, hypogravity, thrust vectoring, legged locomotion, trajectory control