Clear Sky Science · en
Bioinspired spiking architecture enables energy constrained touch encoding
Why smarter touch matters for robots
Our fingertips let us feel a grain of sand, a slipping glass, or a gentle tap in a fraction of a second, all while using remarkably little energy. As robots move out of factories and into homes, hospitals, and crowded workplaces, they will need a similar sense of touch to interact safely with people and fragile objects. This study introduces a new artificial skin and brain-inspired processing system that allows machines to detect where they are being touched with high precision, while keeping energy use extremely low — a key requirement for future mobile and collaborative robots.
A flexible skin that feels like ours
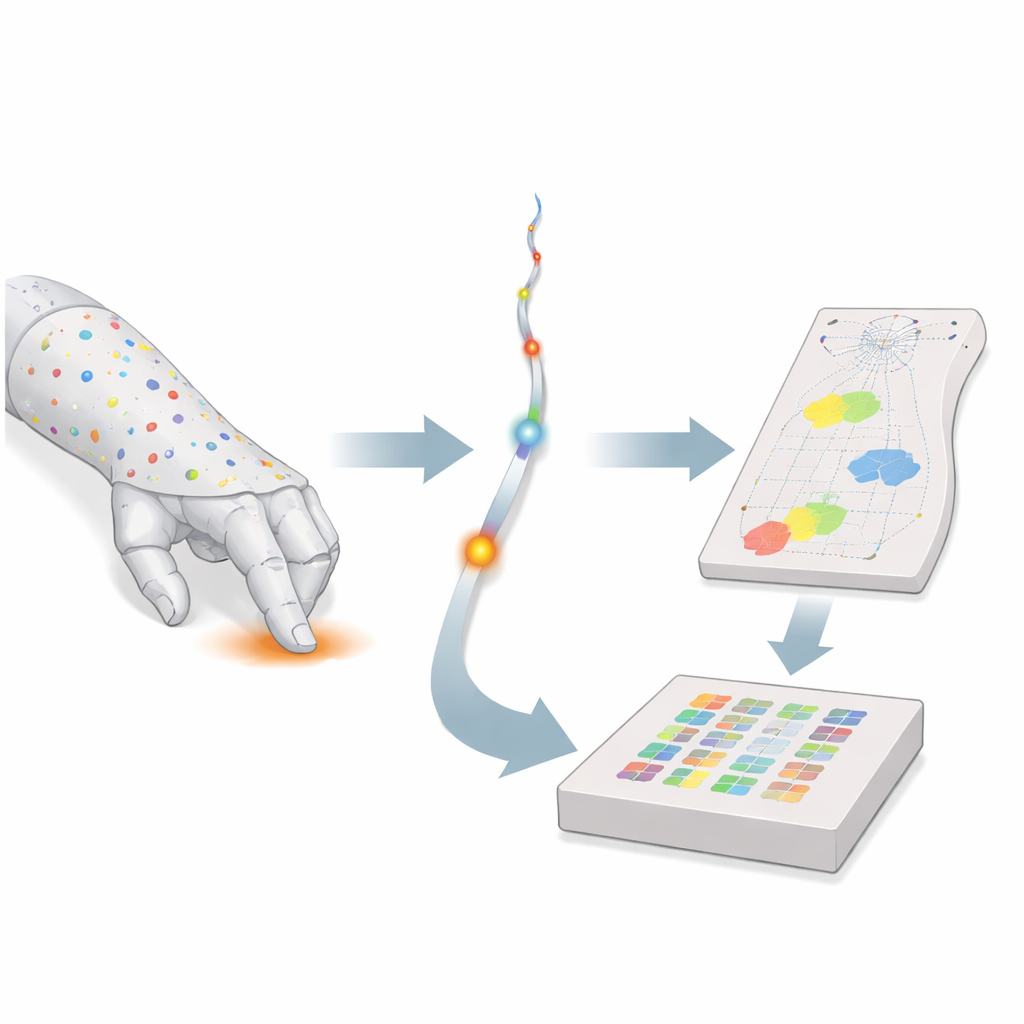
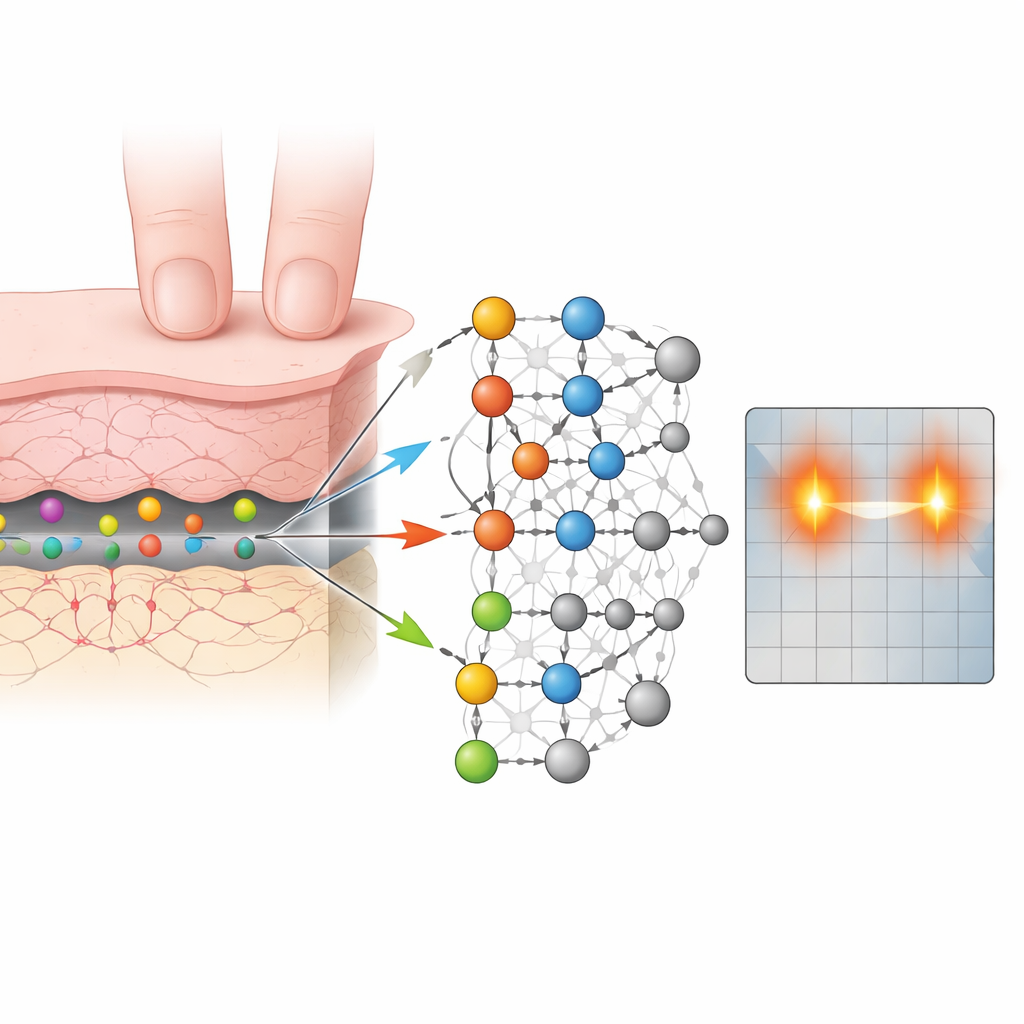
The researchers built a soft, silicone "e-skin" shaped like a human forearm and laced it with 21 tiny optical sensors along a single hair-thin fiber. These sensors, called Fiber Bragg Gratings, respond to stretching and bending of the skin by shifting the color of light reflected inside the fiber. Because the fiber snakes under the surface, each sensor is sensitive not just to a single point but to a small region, much like real touch receptors spread through our skin. Some of these artificial receptors react strongly to very local pressure, while others respond more broadly to deformations, echoing how different nerve endings in human skin capture both fine details and overall shape.
Turning touch into electrical spikes
To interpret this rich flow of data, the team did not rely on conventional deep learning models that process frames of numbers. Instead, they mimicked biology more closely by using a spiking neural network, where information travels as brief electrical pulses, or "spikes," similar to nerve impulses. The optical signals from the e-skin are converted into streams of spikes and sent into the network. Each output neuron in this network stands for a specific spot on the skin, forming a two-dimensional internal map of the surface. When something touches the e-skin, a cluster of neurons spikes in a pattern that reveals where the contact occurred, and the system computes the touch location from the center of this activity.
Sharper touch with fewer resources
Using this design, the system localizes single touch points on the artificial forearm with a typical error of about three millimeters, outperforming a strong deep-learning baseline by roughly one third and achieving about tenfold better spatial resolution than would be expected from sensor spacing alone. It also works when several points are pressed at once, up to four simultaneous contacts, and when presses are applied manually with varying force and direction. The researchers probed different internal wiring patterns in the network and found that a layout inspired by early touch pathways in the spinal cord — where excitatory cells feed into inhibitory interneurons that suppress neighboring outputs — is crucial for sharpening spatial detail. This "lateral inhibition" helps keep the representation crisp, preventing blurring when contacts are close together.
Built for low energy, not just accuracy
A central goal of the work is to keep energy consumption in check, an issue that becomes critical if a whole robot body is covered in sensors. The team trained the network under increasing pressure to fire fewer spikes, mimicking evolution’s need to trade raw performance against metabolic cost. In unconstrained conditions, a more flexible, less biologically realistic architecture performed slightly better. But once spike activity was reduced to energy-efficient levels, the bioinspired layout actually won, delivering higher accuracy for the same activity budget. The researchers then ported this network to a mixed-signal neuromorphic chip that implements neurons and synapses directly in analog electronics. On this hardware, the tactile system ran at sub-milliwatt power during touch and only a few microwatts at rest, while suffering minimal loss in precision.
From lab forearms to future robot bodies
Overall, this work shows that carefully combining soft, distributed sensing with brain-like spiking computation can give machines a precise and fast sense of touch without a heavy energy bill. By matching not only the performance but also the wiring principles of early touch pathways in the nervous system, the system hints at why evolution may have favored certain circuit motifs: they deliver good-enough accuracy under strict energy limits. Scaled up, similar e-skins and neuromorphic processors could allow robots and prosthetic devices to feel contact across their surfaces, react quickly to unexpected bumps, and interact more safely and naturally in the complex, dynamic environments where humans live and work.
Citation: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
Keywords: artificial skin, tactile sensing, spiking neural networks, neuromorphic hardware, robotics safety