Clear Sky Science · en
A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism
Little Robots for Tight Spaces
Imagine a rescue robot small and light enough to slip through a cracked wall, crawl along a narrow pipe, or even swim across a puddle of water. This paper introduces such a machine: a palm‑sized, insect‑like robot called PLioBot that is made from a single folded sheet, moves very quickly for its size, and copes with many kinds of rough terrain. The researchers show how combining clever folding with tiny vibration motors can turn flat materials into agile explorers for cramped, hard‑to‑reach places.
From Flat Sheet to Four‑Legged Crawler
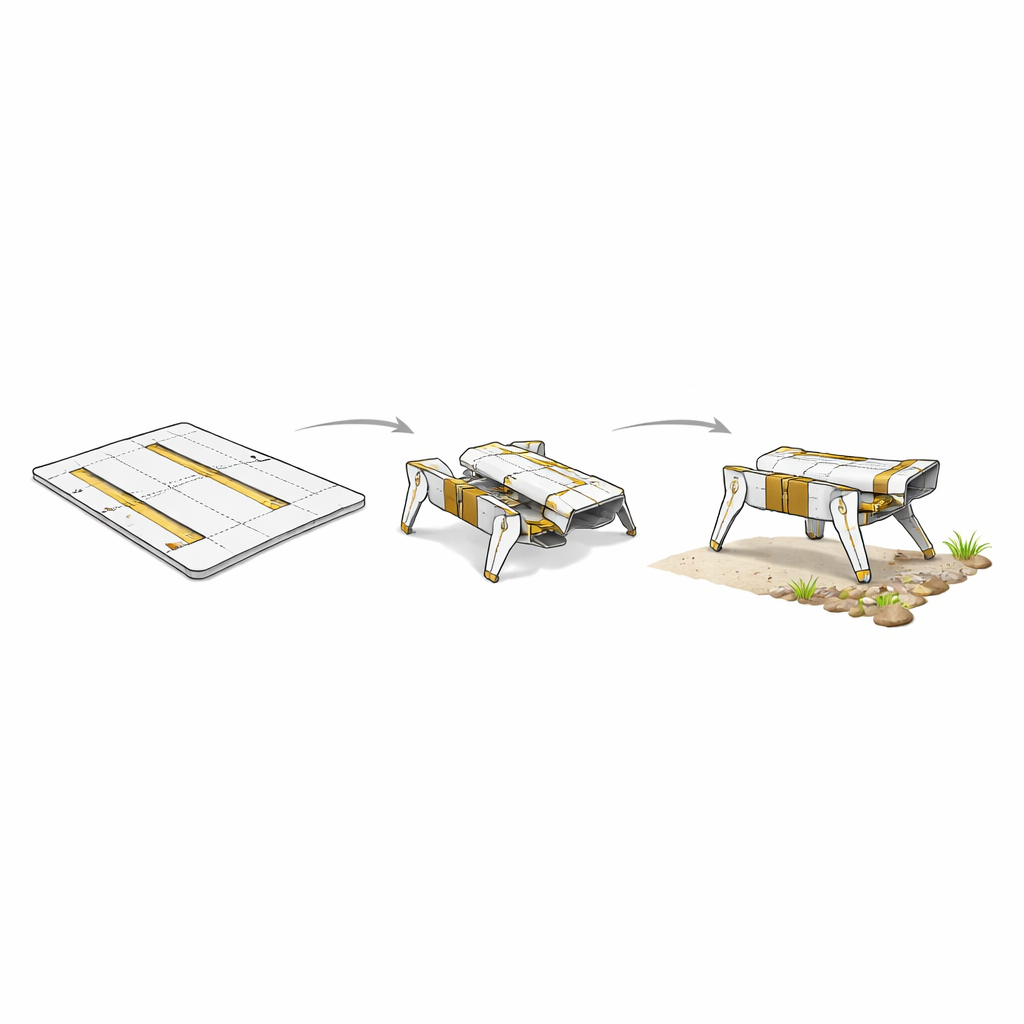
PLioBot begins life as a flat pattern, much like a cut‑and‑fold paper toy. Instead of paper, the pattern is a five‑layer sandwich of glass fiber, carbon fiber, a flexible plastic film, and strips of piezoelectric ceramic that act as muscles. Precisely placed thin regions in the plastic layer serve as hinges. After laser cutting, the entire structure is folded in a choreographed sequence so that the body, four legs, and all eight actuators emerge from one continuous piece. No screws, no separate motors, and no manual alignment are needed—folding alone produces a complete robot about 2.5 centimeters long and weighing only 1.2 grams.
How the Tiny Legs Make Big Strides
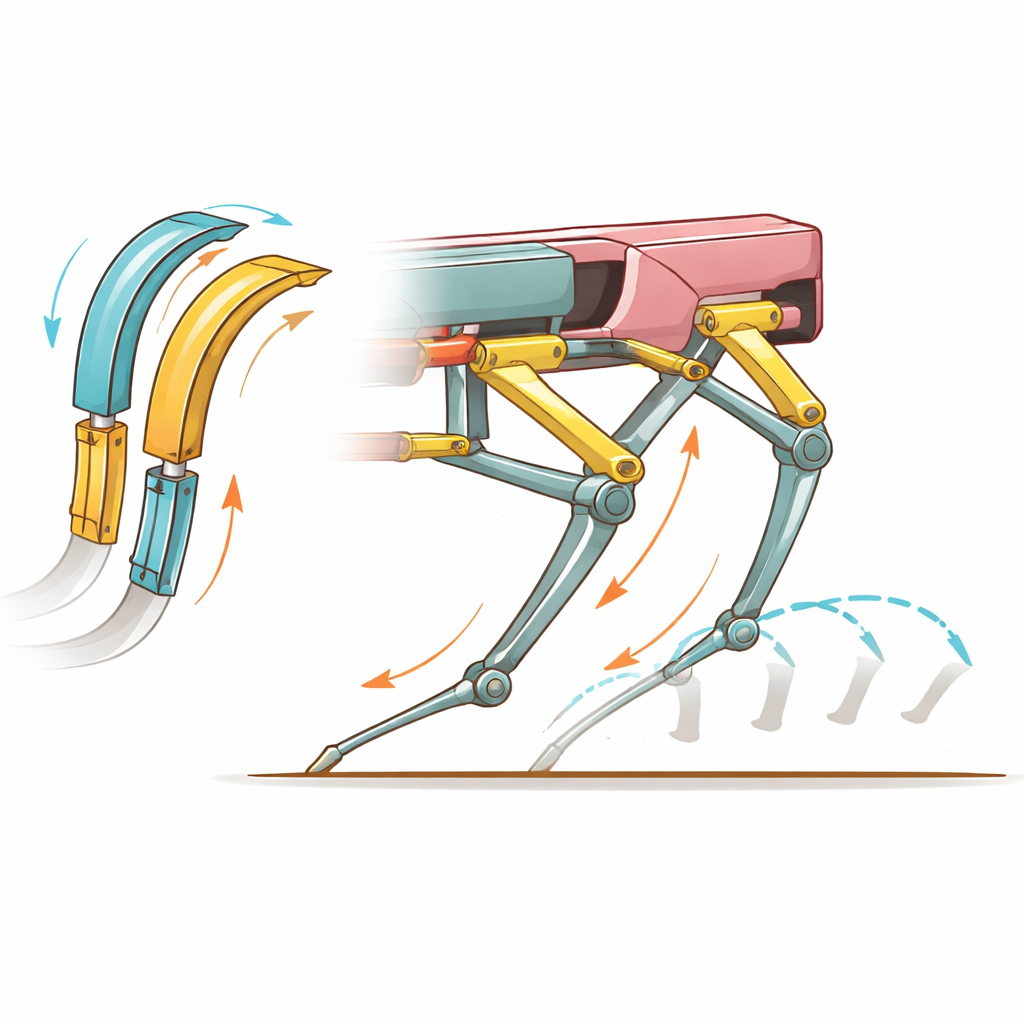
The robot’s motion comes from piezoelectric ceramics—materials that bend slightly when an electric voltage is applied. Each side of PLioBot carries a pair of "twin" strip actuators. When alternating voltages make these strips bend back and forth, their motion is passed through a set of hinged linkages that act like a miniature parallel leg mechanism. By carefully timing the signals, each leg can move up and down as well as forward and back, tracing out a looping path with its foot. Coordinating all four legs in a trot‑like pattern lets the robot push against the ground efficiently and dart forward. At its best settings, PLioBot reaches 44.6 centimeters per second—about 18 body lengths per second—making it one of the fastest legged robots at this scale.
Built‑In Muscles, Fewer Assembly Headaches
Most insect‑scale robots are painstakingly assembled from many tiny parts: separate motors or actuators, frames, and linkages that must all be aligned by hand. That adds cost, limits precision, and makes mass production difficult. The authors tackle this by fully integrating structure and actuation into a single "origami mechanism." They use a refined lamination process in which all layers—stiff glass fiber skins, orthogonal carbon‑fiber electrodes, the flexible hinge film, and the ceramic strips—are cut, stacked, aligned using pin holes, and hot‑pressed together before the final outline is laser‑released. The result is a robust flat blank that already contains the robot’s skeleton, joints, and muscles in their final positions, ready to be folded into shape.
Walking, Climbing, and Swimming in Real‑World Terrain
To test whether their design is useful outside the lab bench, the team pushed PLioBot through a variety of everyday obstacles. On smooth glass it risks slipping, but it still moves quickly; on sponge and acrylic it gains grip at the cost of a bit of speed. It climbs ramps up to 12 degrees and can haul payloads heavier than itself—up to 1.7 grams, with especially good performance below about 0.8 grams. In narrow tunnels only 3 centimeters wide and under 3 centimeters tall, the robot carries a 1.4‑gram load while maintaining several body lengths per second. By swapping in hemispherical foot pads or fin‑like paddles, PLioBot traverses gravel and grass, crosses shifting sand without sinking, walks along the bottom of a tank, and even swims on the water surface using only its flippers for thrust.
What This Means for Future Tiny Explorers
In simple terms, this work shows that you can print and fold a very small robot whose body and muscles are all one piece, and that this robot can move fast and handle many messy, real‑world surfaces. PLioBot does still rely on external power wires, so it is not yet fully independent. But the integrated origami design and fabrication method point toward a future where large numbers of inexpensive, insect‑scale robots could be produced like flat parts, folded into shape, and equipped with miniature batteries and control circuits. Such swarms might one day scout damaged buildings, inspect industrial pipes, or explore other planets—all starting from something that looks, at first, like a cleverly cut sheet.
Citation: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
Keywords: insect-scale robots, origami robotics, piezoelectric actuators, terrain-adaptive locomotion, micro-robot fabrication