Clear Sky Science · en
Wire-form shape memory alloy actuators: modeling, design, and control
Metal Wires That "Remember" Their Shape
Imagine a thin metal wire that can pull like a muscle, quietly bend a robot’s finger, reshape an airplane wing in flight, or gently squeeze a failing heart – all by simply heating and cooling it. This review article looks at such wires, made from shape memory alloys (SMAs), and explains how they work, how engineers design and control them, and where they are already finding real-world use in robots, aircraft, medical devices, and wearable technology.
How Smart Metal Wires Come to Life
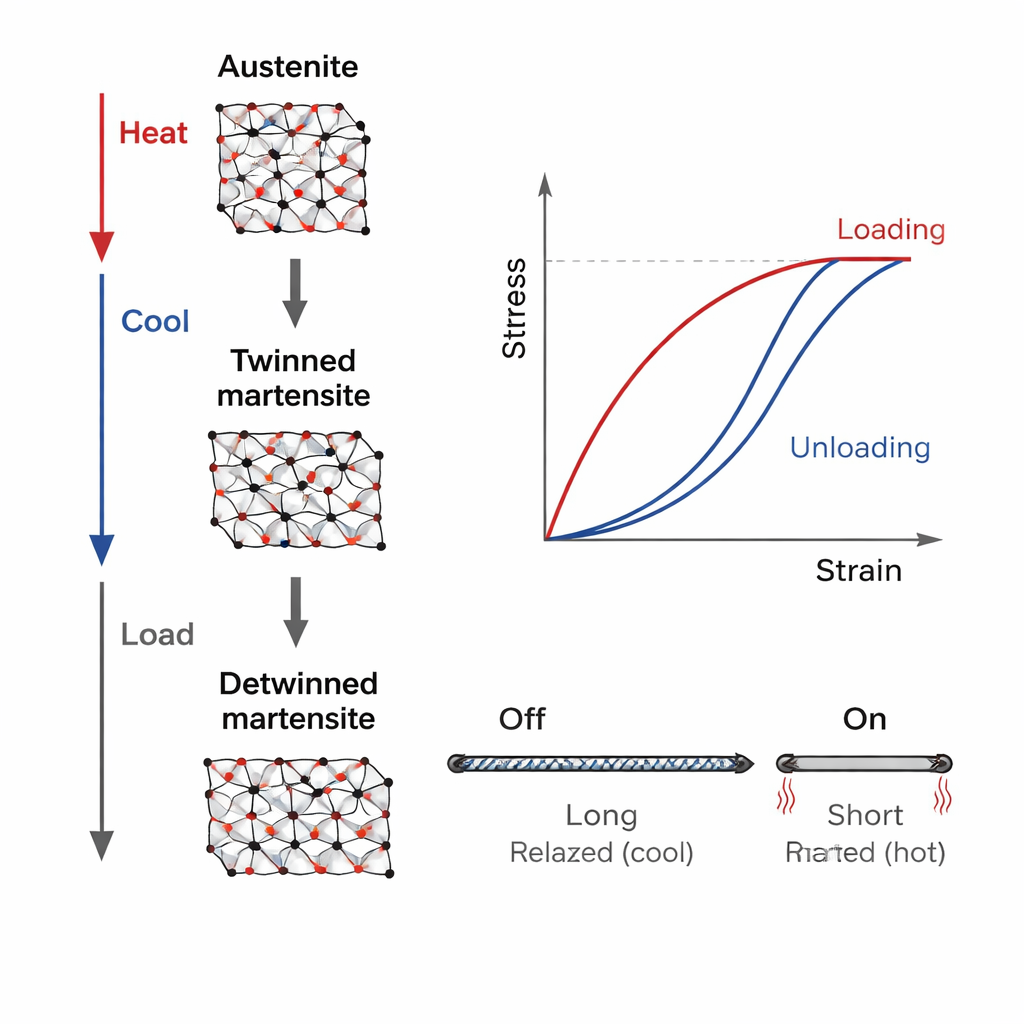
Shape memory alloys are special metals that can be deformed and then return to a pre-set shape when their temperature changes. In one mode, called the shape memory effect, you can bend the wire when it is cool and relatively soft; when heated, it snaps back to its original form. In another mode, superelasticity, the alloy can stretch under load and then spring back once the load is removed. Inside the metal, this behavior comes from solid–solid phase changes between different crystal arrangements, which makes its response highly nonlinear and somewhat tricky to predict. Because SMA wires are thin, engineers can usually treat them as one-dimensional elements, simplifying mathematical models that describe how temperature, stress, strain, and electrical current are linked.
From Equations to Data-Driven Models
To use these smart wires reliably, designers need models that predict how hard they can pull, how far they move, how hot they get, and how their electrical resistance changes. Classical “constitutive” models treat the wire as a bulk material and track how its internal phases change with stress and temperature. These models are efficient but rely on simplifying assumptions. In parallel, researchers increasingly use machine learning and neural networks to learn the wire’s behavior directly from experimental data, capturing subtle hysteresis and history effects. Another important line of work examines how the wire’s electrical resistance and temperature evolve during current-driven heating, enabling self-sensing – the ability to estimate force or motion just by measuring resistance instead of adding separate sensors.
Building Motion: Simple Loads, Soft Structures, and Artificial Muscles
On the hardware side, the paper organizes wire-based SMA actuators by how they are loaded. In the simplest “linear load” setups, a wire pulls against a spring or weight to drive grippers or space release mechanisms. More advanced “nonlinear load” systems embed wires into flexible beams, soft polymers, textiles, or origami-like structures to achieve large bending motions, crawling robots, and woven exoskeleton gloves. Differential configurations use two or more opposing wires, mimicking pairs of muscles like biceps and triceps, to provide fast, reversible motion in joints such as artificial elbows and ankles. Because an SMA wire can only shorten by about 8%, a major design theme is stroke amplification: winding long wires around pulleys, arranging them in curved paths, using modular sliding or rotating stages, or adopting SMA springs to achieve larger motions in tight spaces.
Teaching Smart Wires to Obey
Controlling these actuators is challenging because their response depends on both temperature and mechanical history. The article reviews a spectrum of control strategies, from classic PID controllers to more sophisticated schemes. Model-based approaches use physics-derived equations or hysteresis models to design sliding-mode controllers and feedforward compensators that counteract nonlinearity. Neural-network and reinforcement-learning controllers go further, learning how to drive the wire for accurate motion without relying on perfect models. At the same time, self-sensing control methods use the wire’s changing resistance as a built-in feedback signal, sometimes combined with neural networks, to estimate position or force without bulky external sensors.
Real-World Uses and Future Directions
Wire-form SMA actuators are already powering soft robotic grippers, tiny crawling robots, morphing aircraft wings, satellite release devices, implantable pumps and stents, heart-assist wraps, compression garments, exoskeleton suits, and rehabilitation gloves. Across all of these fields, common hurdles remain: slow cooling and heat buildup, fatigue over many cycles, control complexity, and manufacturing cost. The authors argue that progress will hinge on integrating three threads: better multiscale and data-enhanced models, smarter structural designs that combine SMAs with flexible electronics and multifunctional materials, and intelligent control strategies that adapt online. They envision unified “modeling–design–control” frameworks, supported by digital twins and machine learning, that can co-optimize these aspects together. For a layperson, the message is that these shape-shifting wires are maturing from lab curiosities into practical artificial muscles, with the potential to quietly reshape machines, medical devices, and wearable systems in the years ahead.
Citation: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
Keywords: shape memory alloy, soft robotics, smart actuators, morphing structures, wearable devices