Clear Sky Science · de
Gehirninspirierte probabilistische Belegungsrasterkartierung mit Vektor-symbolischen Architekturen
Roboter, die die Welt als Flickenteppich sehen
Jedes selbstfahrende Auto, jeder Lagerroboter oder Saugroboter braucht ein schnelles inneres Bild seiner Umgebung: was fest ist, was frei und was noch unbekannt ist. Dieses Papier stellt eine neue Methode vor, mit der Roboter dieses Bild—eine sogenannte Belegungsrasterkarte—aufbauen können. Sie leiht sich Ideen davon, wie das Gehirn Informationen repräsentieren könnte, mit dem Ziel, Karten genau zu halten und zugleich deutlich schneller und effizienter zu berechnen.
Roh-Sensorpings in eine Weltkarte verwandeln
Roboter verwenden oft Laserscanner oder andere Distanzsensoren, um die Welt beim Bewegen abzutasten und Punktwolken zu sammeln, die zeigen, wo sich Objekte befinden und wo Raum frei ist. Eine klassische Technik, die Belegungsrasterkartierung, teilt die Umgebung in kleine Zellen, ähnlich Pixeln auf einem Bildschirm, und ordnet jeder Zelle eine Wahrscheinlichkeit zu, belegt zu sein. Traditionelle Methoden behandeln dies als ein aufwändiges statistisches Problem, verfolgen Unsicherheit sorgfältig, benötigen dabei aber viel Zeit und Speicher. Neuere neurale Netzmethoden sind schneller und können Lücken füllen, verhalten sich jedoch wie Blackboxes, sind in sicherheitskritischen Anwendungen schwer zu vertrauen und müssen meist für jede neue Umgebung neu trainiert werden.
Ein gehirninspirierter Mittelweg
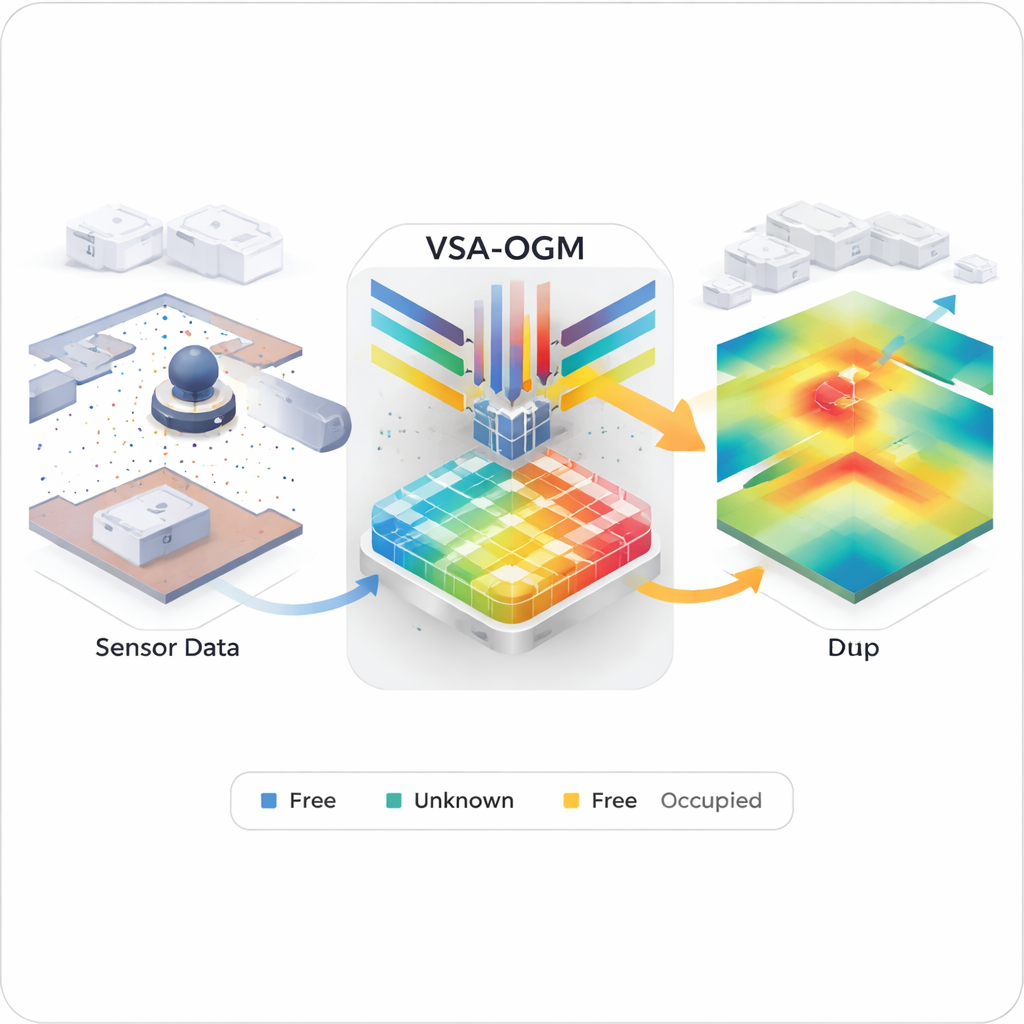
Die Autoren schlagen einen „neuro-symbolischen“ Kompromiss namens VSA-OGM vor, kurz für Vector Symbolic Architecture Occupancy Grid Mapping. Anstatt jedes Detail in einem dichten Raster zu speichern oder Struktur in Millionen von Netzwerkgewichten zu vergraben, kodiert die Methode Sensormessungen als sehr lange Vektoren in einem hochdimensionalen Raum—eine mathematische Idee, inspiriert von Theorien darüber, wie Neuronengruppen Konzepte und Orte repräsentieren könnten. Die Umgebung wird in Kacheln aufgeteilt, und jede Kachel besitzt Vektorspeicher für „belegt“ und „frei“ als Evidenz. Während sich der Roboter bewegt und Punktwolken sammelt, wird jede Beobachtung in einen dieser hochdimensionalen Vektoren umgewandelt und in den passenden Kachlenspeicher gebündelt, wodurch Informationen über die Zeit effizient akkumuliert werden.
Von verrauschten Vektoren zu klaren Karten
Natürlich birgt das Bündeln vieler Signale in einem einzigen hochdimensionalen Speicher die Gefahr, ein verrauschtes, schwer lesbares Gemisch zu erzeugen. VSA-OGM begegnet dem mit einer sorgfältig gestalteten Dekodier-Pipeline. Zuerst vergleicht sie die Kachlenspeicher mit Vektoren, die Positionen im Raum repräsentieren, und erzeugt grobe „Quasi-Wahrscheinlichkeiten“ für Belegung. Danach wendet sie eine Reihe nichtlinearer Schritte und ein Werkzeug der Informationstheorie—die Shannon-Entropie—an, um herauszufiltern, wo die Daten stark für die eine oder andere Klasse sprechen. Schließlich nutzt sie eine Softmax-Funktion, um diese Signale in echte Wahrscheinlichkeiten zu konvertieren, und kombiniert sie zu einer finalen Karte, die die Vorzeichen-differenz zwischen „belegt“ und „frei“ anzeigt. Das Ergebnis ist ein glattes Belegungsraster, das über spärlich gemessene Bereiche interpoliert und gleichzeitig vollständig probabilistisch und interpretierbar bleibt.
Schnellere Karten für einen Roboter—oder viele
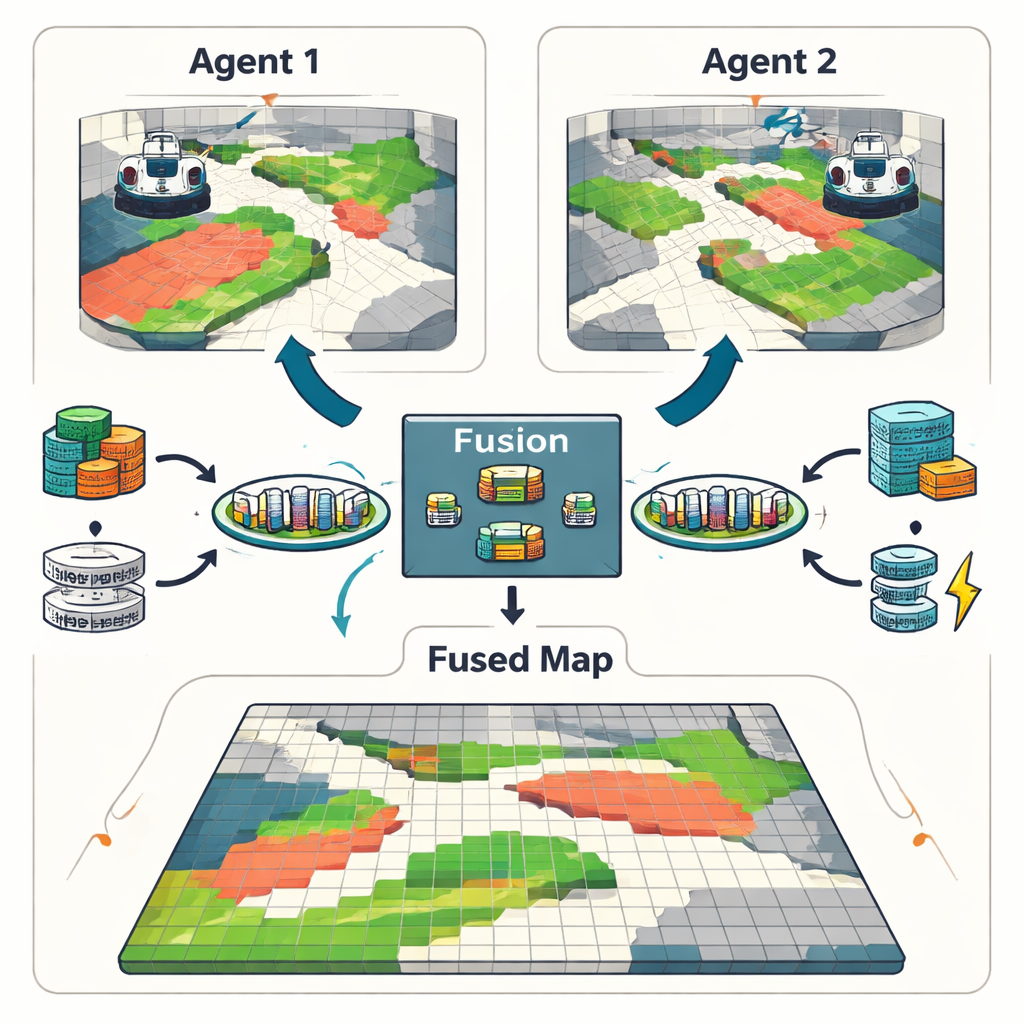
Um ihren Ansatz zu testen, führten die Forschenden VSA-OGM auf mehreren simulierten und realen Datensätzen aus, darunter eine klassische Indoor-Roboterkarte und ein großmaßstäbliches Fahrszenario. Gegenüber starken traditionellen Baselines, die räumliche Korrelationen sorgfältig modellieren, erzielte VSA-OGM vergleichbare Kartenqualität, nutzte dabei jedoch etwa 400-mal weniger Speicher und lief bis zu 45-mal schneller. Im Vergleich zu gestrafften traditionellen Methoden, die einige statistische Details fallenlassen, erreichte es ebenfalls vergleichbare Genauigkeit bei einer Reduktion der Latenz um etwa den Faktor fünf. Gegenüber einem neuronalen System, das Stunden an Training und Millionen von Parametern erfordert, lieferte VSA-OGM vergleichbare Kartierungsqualität ganz ohne Vortraining und verringerte die Verarbeitungszeit pro Frame um das bis zu Sechsfache. Das Framework unterstützt zudem mehrere Roboter: Vektorspeicher verschiedener Agenten lassen sich einfach addieren und erzeugen so fusionierte Karten mit geringem Informationsverlust.
Was das für alltägliche Roboter bedeutet
Einfach gesagt zeigt diese Arbeit, dass Roboter sich nicht zwischen langsam‑aber‑vertrauenswürdiger Mathematik und schnell‑aber‑intransparenten neuronalen Netzen entscheiden müssen, wenn sie Karten der Welt erstellen. Durch die Verwendung gehirninspirierter hochdimensionaler Vektoren bewahrt VSA-OGM die klare probabilistische Struktur klassischer Methoden und erreicht zugleich die Geschwindigkeit und Effizienz, die für Echtzeitbetrieb auf begrenzter Hardware nötig sind. Es bleiben Herausforderungen—etwa der Umgang mit extrem ungleich verteilten Daten und sehr dichten Umgebungen—doch der Ansatz weist in Richtung künftiger Roboter, die ihre Umgebung sicher und zuverlässig verstehen können, selbst auf bescheidenen Bordcomputern.
Zitation: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
Schlüsselwörter: Belegungsrasterkartierung, autonome Roboter, vektor-symbolische Architekturen, probabilistische Kartierung, LiDAR-Sensorik