Clear Sky Science · de
Verhaltensbelege für die hierarchische Ausführung sequenzieller Bewegungen
Wie unser Gehirn einfache Bewegungen zu fließenden Handlungen formt
Alltägliche Tätigkeiten wie Tippen auf einer Tastatur, das Spielen einer Klavierskala oder das Greifen nach mehreren Gegenständen auf einem Tisch wirken mühelos. Im Hintergrund muss das Gehirn jedoch viele kleine Bewegungen zu glatten, koordinierten Aktionen verketten. Diese Studie stellt eine auf den ersten Blick einfache Frage: Plant das Gehirn solche Aktionsketten immer als eine lange durchgehende Bewegung, oder baut es sie schrittweise auf, mithilfe einer versteckten Hierarchie kleinerer Bausteine?
Greifen nach großen Zielen auf einem Tisch
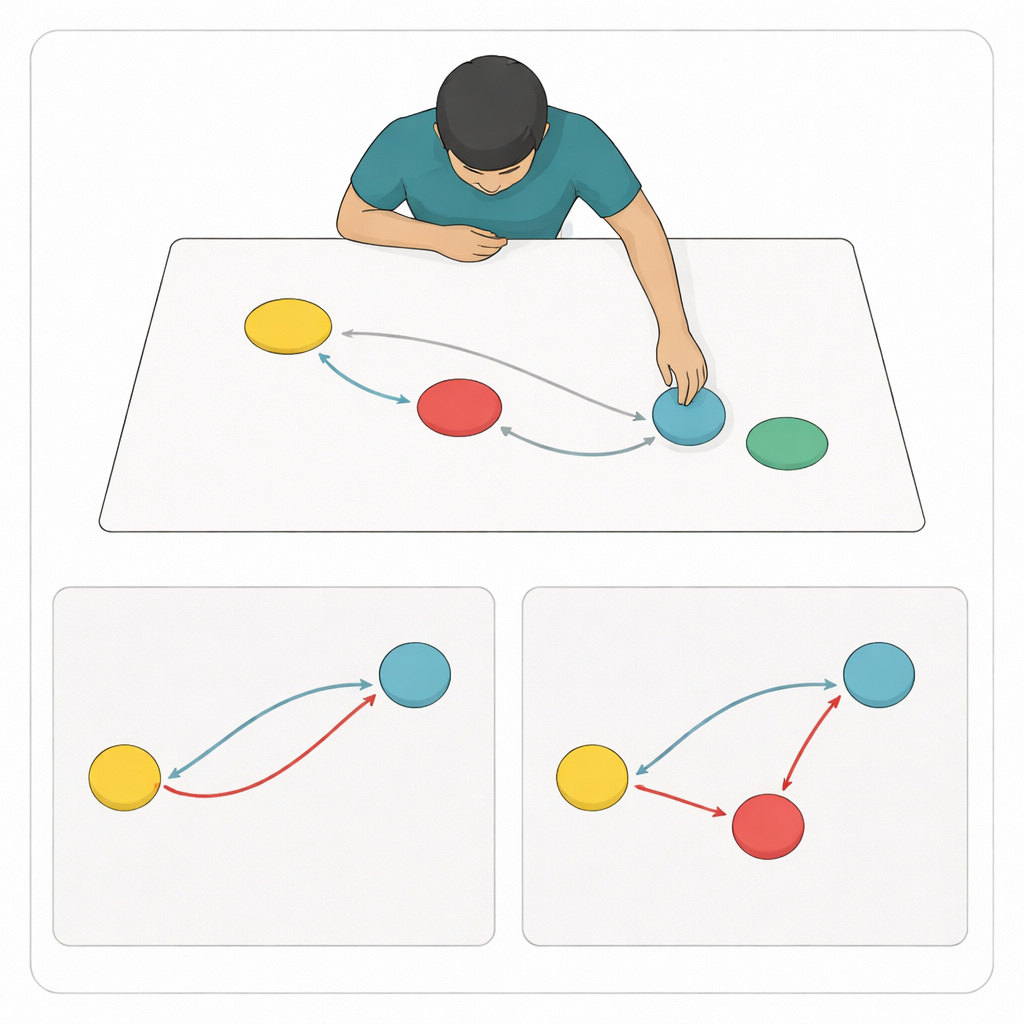
Um das zu untersuchen, entwarfen die Forschenden ein Tischspiel im Stil von „Punkte verbinden“ für die Hand. Zwanzig Freiwillige saßen an einem Tisch, auf dessen Oberfläche mehrere große farbige Kreise gedruckt waren. Ein Startkreis lag nahe am Körper, weitere Kreise waren links, rechts und oben platziert. In jedem Versuch hörten die Teilnehmenden einen Ton und mussten mit der Fingerspitze vom Startkreis aus durch eine kurze Folge von Zielen und zurück gelangen, so schnell wie möglich, aber ohne extreme Genauigkeit: Es reichte, wenn die Fingerspitze irgendwo innerhalb jedes Kreises landete. Dieses Setup mit geringer Präzisionsanforderung förderte schnelles und flüssiges Bewegen, sodass die Pfade zwischen den Zielen eher gebogen und verschmolzen als scharf an jedem einzelnen Ziel gestoppt wurden.
Verborgene Pläne aus den Krümmungen der Hand lesen
Anstatt die benötigte Zeit oder Fehlerhäufigkeit zu messen, konzentrierte sich das Team auf die genaue Form jedes Fingerspitzenpfads. Sie betrachteten zwei Schlüsselfeatures. Erstens das „Zwischenbiegen“: wie stark der Pfad zu einem Ziel schon in Richtung des nächsten Ziels abdriftete, bevor es erreicht wurde. Zweitens das „Umkehren an einem Ziel“: wie scharf oder sanft sich der Pfad krümmte, wenn er nahe an einem Ziel vorbeiging und die Richtung änderte. Zusammen zeigen diese Muster, ob eine Bewegung zu einem Ziel bereits das nächste Ziel berücksichtigt – ein Effekt, der als „Koartikulation“ bezeichnet wird und dem ähnelt, wie der Mund kommende Laute beim Sprechen formt. Die Wissenschaftler verglichen diese gemessenen Kurven mit den Pfaden zweier Computermodelle der Bewegungsplanung, die beide auf etablierten Theorien optimaler Steuerung basieren, sich aber in ihrer inneren Struktur unterscheiden.
Flache Pläne versus geschichtete Pläne
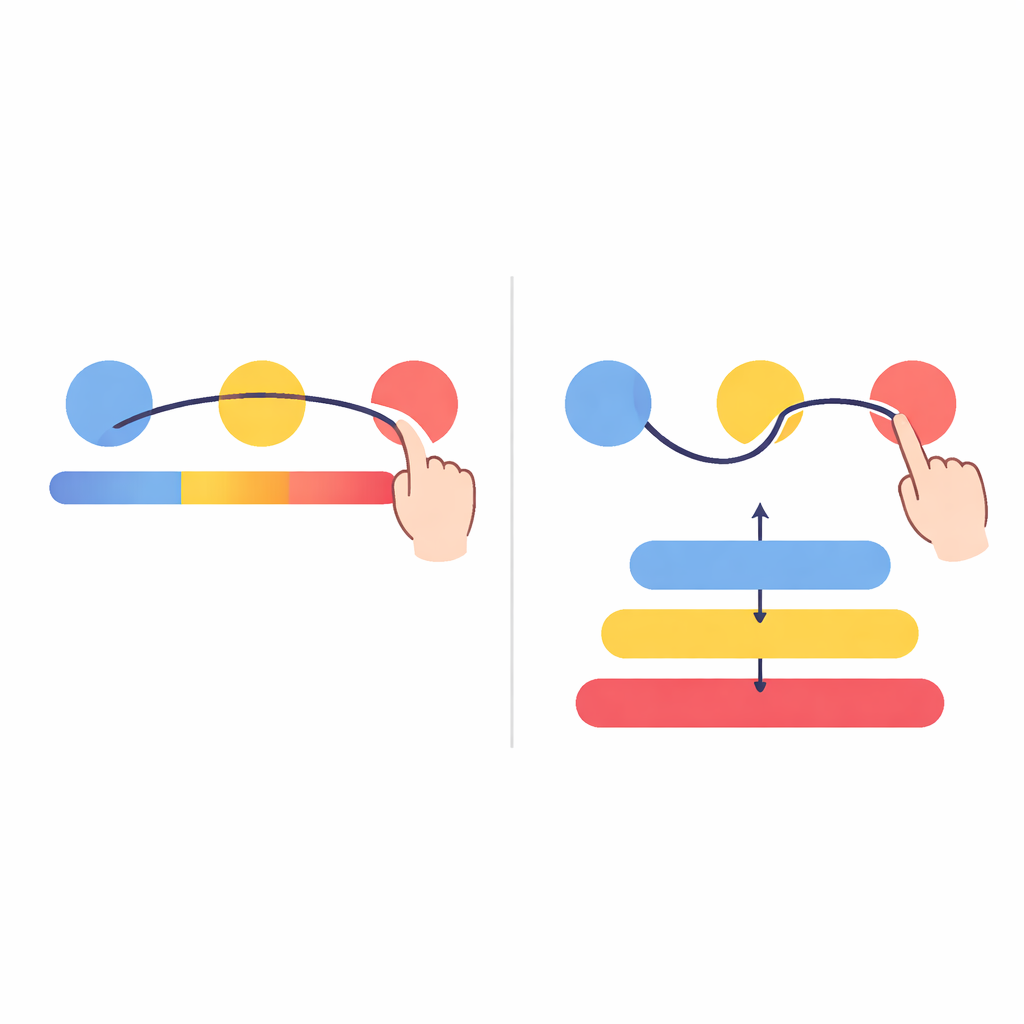
Im „flachen“ Modell stellt man sich vor, dass das Gehirn die gesamte Drei-Ziel-Sequenz als eine einzige, einheitliche Trajektorie plant, bevor die Hand zu bewegen beginnt. Das ähnelt einer vollständig einstudierten Geste oder einem „Chunk“, der in einem Zug ausgeführt wird. In diesem Fall sind Zwischenbiegen und Umkehren um Ziele eng verknüpft: Sobald der Planer entschieden hat, wie stark auf das erste Ziel gezielt wird, legt das weitgehend fest, wie die Kurven über die gesamte Sequenz aussehen. Das „hierarchische“ Modell hingegen fügt eine einfache Zwischenebene hinzu, die kleinere Stücke – etwa eine Zwei-Ziel-Bewegung gefolgt von einer Rückkehr zu einem Einzelziel – dynamisch zusammenfügt. Ein separates dynamisches System entscheidet, wann von einer Teilbewegung zur nächsten gewechselt wird, wodurch die Form um jedes Ziel unabhängiger angepasst werden kann, während die Gesamtbewegung glatt bleibt.
Verhalten, das hierarchisch wirkt
Als die Forschenden viele Simulationen laufen ließen, stellten sie fest, dass das flache Modell einige Kombinationen von Zwischenbiegen und Umkehren schlicht nicht erzeugen konnte, die menschliche Teilnehmende natürlich zeigten. Insbesondere zeigten Menschen oft starkes Biegen in Richtung des zweiten Ziels im ersten Bewegungsabschnitt, erzeugten aber zugleich eine scharfe oder anders geformte Wende um dieses zweite Ziel – Muster, die der flache Planer nicht nachbilden konnte. Das hierarchische Modell hingegen konnte diese gemischten Verhaltensweisen reproduzieren, indem es separate „Teilbewegungen“ an Zwischenzielen dynamisch verknüpfte. Durch den Vergleich der realen Daten mit beiden Modellen kamen die Autorinnen und Autoren zu dem Schluss, dass nahezu die Hälfte aller aufgezeichneten Bewegungssequenzen eindeutig eine hierarchische Erklärung erforderte, während andere mit flacher Planung vereinbar waren. Das deutet darauf hin, dass Menschen je nach Sequenz flexibel die Strategie wechseln.
Was das für alltägliche Fertigkeiten bedeutet
Die Befunde legen nahe, dass unser Gehirn – selbst ohne langes Training oder hochspezialisierte Routinen – beim Aneinanderreihen einfacher Greifbewegungen oft auf geschichtete Pläne zurückgreift. Anstatt eine Sequenz immer in einen einzigen starren Chunk zu komprimieren, scheint das motorische System wiederverwendbare Bewegungsbausteine bereitzuhalten und sie in Echtzeit zu verknüpfen. Im Laufe des Trainings können solche Ketten allmählich zu flacheren, vollständig „gechunkten“ Aktionen kollabieren, was erklärt, wie Fertigkeiten so schnell und automatisch werden. Diese Arbeit bietet ein neues, geometriebasiertes Fenster darauf, wie das Gehirn Bewegung organisiert, und kann künftige Forschung zu motorischem Lernen, Rehabilitation und zum Design von Robotern mit ähnlich anpassungsfähiger Grazie leiten.
Zitation: Cuevas Rivera, D., Kiebel, S.J. Behavioral evidence for the hierarchical execution of sequential movements. Commun Psychol 4, 52 (2026). https://doi.org/10.1038/s44271-026-00436-5
Schlüsselwörter: Motorik, Bewegungsplanung, Chunking, hierarchisches Verhalten, sequenzielles Erreichen