Clear Sky Science · de
Bruchbasierte Greiftechnik: dynamische Schläge ermöglichen vorhersehbares robotisches Verankern an Süßwassereis
Klettern dort, wo die Schwerkraft kaum vorhanden ist
Stellen Sie sich vor, Sie müssten eine gefrorene Klippe erklimmen, auf der die Schwerkraft so gering ist, dass Ihr eigenes Gewicht den Stiefeln nicht hilft, Halt zu finden. Das ist die Herausforderung für künftige Roboter, die zu eisigen Monden wie Saturns Enceladus geschickt werden sollen, wo Forscher in tiefen Eisspalten und Höhlen nach Lebenszeichen suchen wollen. Dieses Paper beschreibt eine neue Methode, mit der Roboter durch schnelle, hammerähnliche Schläge und einen festen Kneifgriff in das Eis einhaken können, inspiriert von den Eispickeln von Bergsteigern. Das Ergebnis ist ein leichtes Verankerungssystem, das deutlich weniger Kraft und Energie benötigt als heutige Eisschrauben oder erhitzte Pickel und damit möglicherweise zuvor unzugängliche eisige Welten erreichbarer macht.

Warum es so schwer ist, an Eis festzuhalten
Auf der Erde kann ein Kletterer sein volles Gewicht in eine Eisschraube oder einen Pickel lehnen, damit diese in die Oberfläche greifen. Auf Enceladus beträgt die Schwerkraft nur etwa ein Prozent der Erdschwerkraft, sodass ein Roboter sich nicht auf sein Gewicht verlassen kann, um Werkzeuge ins Eis zu drücken. Bestehende Optionen haben jeweils große Nachteile. Eisschrauben benötigen große Vorschubkräfte, um überhaupt in die Oberfläche einzudringen—so viel, dass ein Roboter auf Enceladus so schwer wie ein großer Mars-Rover sein müsste, um sie effektiv zu nutzen. Erhitzte „thermische Pickel“ können sich mit sehr wenig Druck in Position schmelzen, verbrauchen dabei aber enorme Energiemengen bei jedem Einsatz, was für Raumfahrzeuge weit von der Sonne ein ernstes Problem darstellt. Gleichzeitig verlassen sich viele moderne Kletterroboter auf raue Gesteinsstrukturen, Unterdruck oder spezielle Klebstoffe, die alle mit den glatten, aber welligen Formen natürlichen Gletschereises nur schlecht zurechtkommen.
Eine Technik von menschlichen Eiskletterern übernehmen
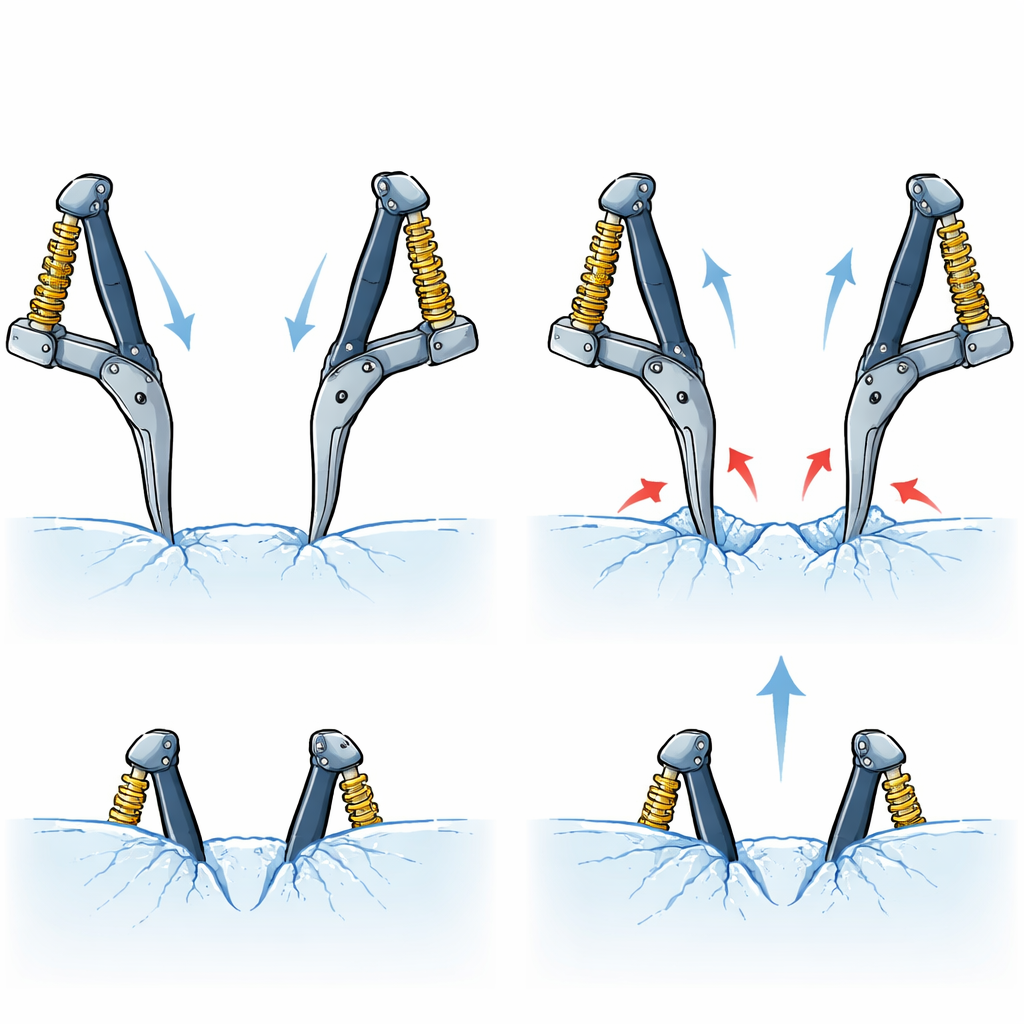
Die Autoren schlagen eine andere Strategie vor: Statt sich an die Eisoberfläche anzupassen, erzeugt der Roboter seine eigenen Griffpunkte. Das Gerät verwendet zwei kleine Eispickel, die an einem kompakten Greifer montiert sind. Zuerst werden in den Armen Federn aufgezogen, die eine mäßige Menge mechanischer Energie speichern. Beim Auslösen schwingen die Pickel wie winzige Hämmer und treffen das Eis, wobei sie kleine Vertiefungen herausschlagen. Anschließend presst derselbe Mechanismus die Pickel zueinander, sodass ihre Spitzen in den neuen Ausbeulungen einhaken. Dieser zweistufige Prozess—Einschlag, dann Greifen—verwandelt eine glatte Eisfläche in etwas, an dem der Roboter sich festhalten kann, und lässt sich leicht umkehren, damit der Roboter einen weiteren „Schritt“ machen kann. Der gesamte Zyklus wird von einem einzigen Motor angetrieben, der sowohl die Federn aufzieht als auch den Kneifgriff anzieht.
Die Physik hinter dem Griff testen
Um sicherzugehen, dass dieser Ansatz zuverlässig funktioniert, erstellte das Team mathematische Modelle dafür, wie tief die Pickelspitzen eindringen und wie stark sie nach dem Einschlag zurückfedern könnten. Anschließend testeten sie einzelne Pickel, die als Pendel in an typische Gletschertemperaturen gekühlte Blocke aus Süßwassereis schwingen. Durch den Vergleich von Theorie und Experiment stellten sie fest, dass ihre Modelle vorhersagen konnten, wie tief eine Vertiefung entsteht, und die Rückstoßenergie abschätzen konnten, wenn der Pickel zurückschnellt. Mit diesen Ergebnissen berechneten sie, wie stark ein Roboter den Greifer vor dem Ausschwingen gegen das Eis drücken muss, damit die Pickel in ihren neuen Vertiefungen bleiben und nicht herausspringen. Für die gewählte Federenergie sagte das Modell voraus, dass etwa 16 Newton Vorschub—ungefähr dem Gewicht von ein paar Litern Wasser auf der Erde—nahezu sicheren Erfolg bringen würden.
Vom Labortisch zur Gletscherwand
Mit den Modellen in der Hand testeten die Forscher den vollständigen Zwei-Pickel-Greifer. Im Labor bestätigten sie, dass Einschläge mit gespeicherter Federenergie von 8 Joule genügend tiefe Vertiefungen erzeugen konnten, während sie deutlich weniger anfänglichen Vorschub benötigten als Eisschrauben und bei weitem weniger Energie als thermische Verankerungen. Sie maßen dann die Festigkeit des Endgriffs, indem sie das Gerät senkrecht vom Eis abzogen. Durch das Einstellen, wie stark die Pickel zueinander gedrückt wurden, entdeckten sie zwei Ausfallarten des Griffs: Bei geringem Druck schoben sich die Spitzen aus den Vertiefungen; bei sehr hohem Druck brachen die Eisvorsprünge selbst ab. Zwischen diesen Extremen lag ein Optimalbereich, in dem der Greifer mehr als das Doppelte seines Eigengewichts tragen konnte. Feldtests auf einem französischen Gletscher zeigten, dass sich das Gerät an steilem, natürlichem Eis, festem Schnee und sogar an Baumstämmen, Felsen und hartgepresstem Boden verankern konnte, was bestätigte, dass die Einschlag-und-Kneif-Methode auch außerhalb des Labors funktioniert.
Was das für zukünftige Entdecker bedeutet
Die Studie zeigt, dass Brechen und Kneifen in Eis eine hocheffiziente Methode sein kann, damit Roboter in rauen, niedrig-gravitativen Umgebungen klettern und sich sichern können. Indem das System ausnutzt, dass das Aufbrechen von Eis weit weniger Energie erfordert als dessen Schmelzen, bildet der Zwei-Pickel-Greifer starke, reversible Verankerungen mit bescheidenen Kräften und nur wenigen Joule Energie pro Schritt. Für Missionen zu Enceladus oder anderen eisigen Welten könnte ein solches System kleinen, energiearmen Robotern erlauben, sicher in Spalten abzusteigen oder an Klippenwänden zu hängen, während sie Proben entnehmen, die Hinweise darauf liefern könnten, ob es Leben jenseits der Erde gibt. Dieselbe Idee könnte auch erdgebundenen Robotern helfen, Gletscher, Eishöhlen und brüchige Felswände zu erkunden, die für menschliche Kletterer zu gefährlich oder unzugänglich sind.
Zitation: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
Schlüsselwörter: robotisches Eisklettern, planetare Erkundung, robotische Greifer, Eisbruch-Verankerung, Enceladus-Missionen