Clear Sky Science · de
Konkrete Multi-Agenten-Wegplanung für kinodynamisch aggressive Manöver
Roboter, die sich wie im Verkehr bewegen können
Stellen Sie sich dutzende fliegende und fahrende Roboter vor, die durch ein Lagerhuschen, sich niemals stoßen und ihre Aufgaben schneller erledigen, als menschliche Fahrer es könnten. Dieses Papier beschreibt eine neue Methode, um einen solchen Roboter-„Verkehr“ zu choreografieren, sodass viele Maschinen in engen Räumen aggressiv und schnell manövrieren können und dennoch sicher bleiben. Die Arbeit ist wichtig, weil dieselben Ideen eines Tages Flotten in Fabriken, Lagern und Lieferdiensten antreiben könnten, die in unserem Alltag rund um die Uhr funktionieren müssen.
Warum das Lenken vieler Roboter so schwer ist
Die Koordination einer Robotermenge ist weitaus schwieriger als die Steuerung eines einzelnen Geräts. Jeder Roboter muss von seinem Startpunkt zum Ziel gelangen, ohne zu kollidieren, andere zu blockieren oder in endlosen Schleifen stecken zu bleiben. Heutige Ansätze bewegen sich meist an zwei Extremen. Einige Methoden behandeln Roboter wie Spielfiguren auf einem Gitter, was die Planung für Hunderte von Einheiten schnell und mathematisch sauber macht – doch die resultierenden Bahnen ignorieren häufig, wie reale Maschinen sich tatsächlich bewegen, beschleunigen oder drehen. Andere Verfahren simulieren die vollständige physikalische Bewegung und erzeugen schöne, glatte Pfade, werden aber quälend langsam oder unzuverlässig, sobald die Anzahl der Roboter über eine Handvoll hinausgeht.
Ein Mittelweg: „Konkrete“ Planung
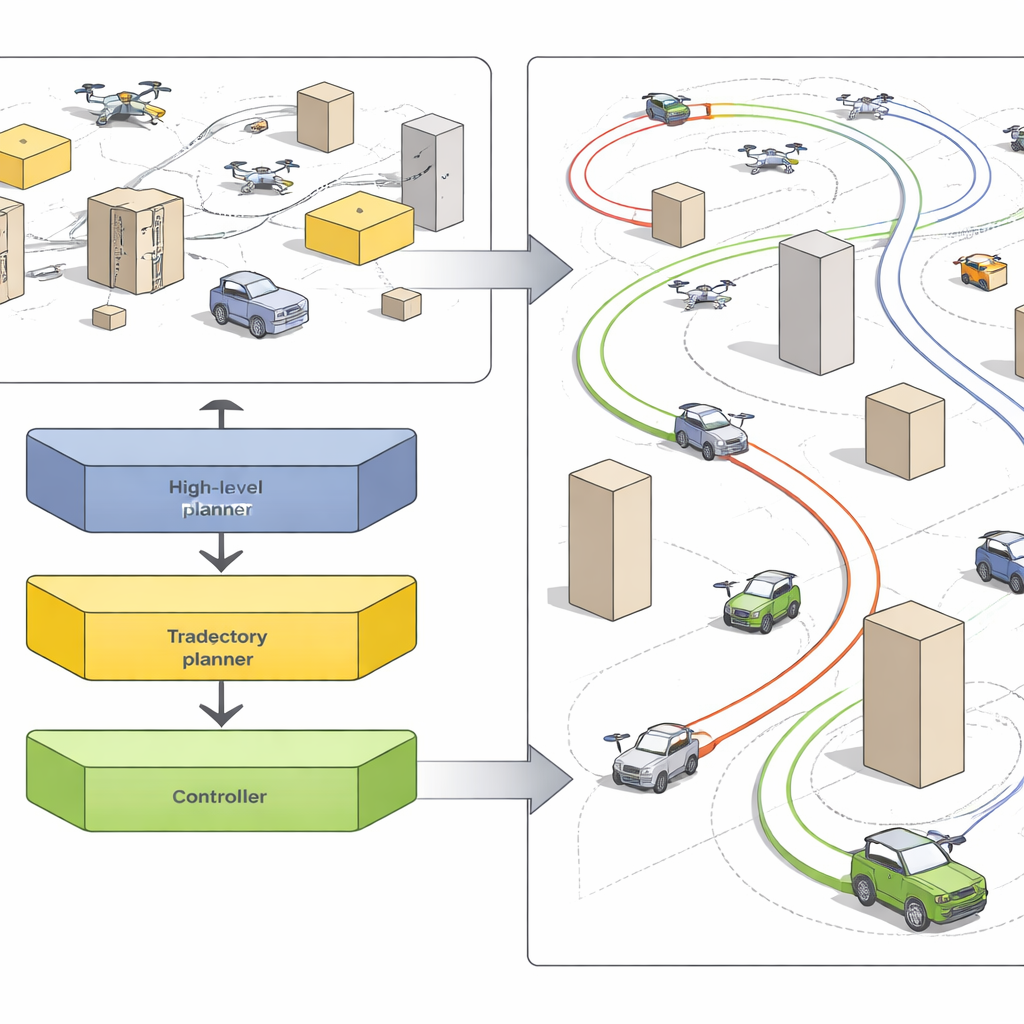
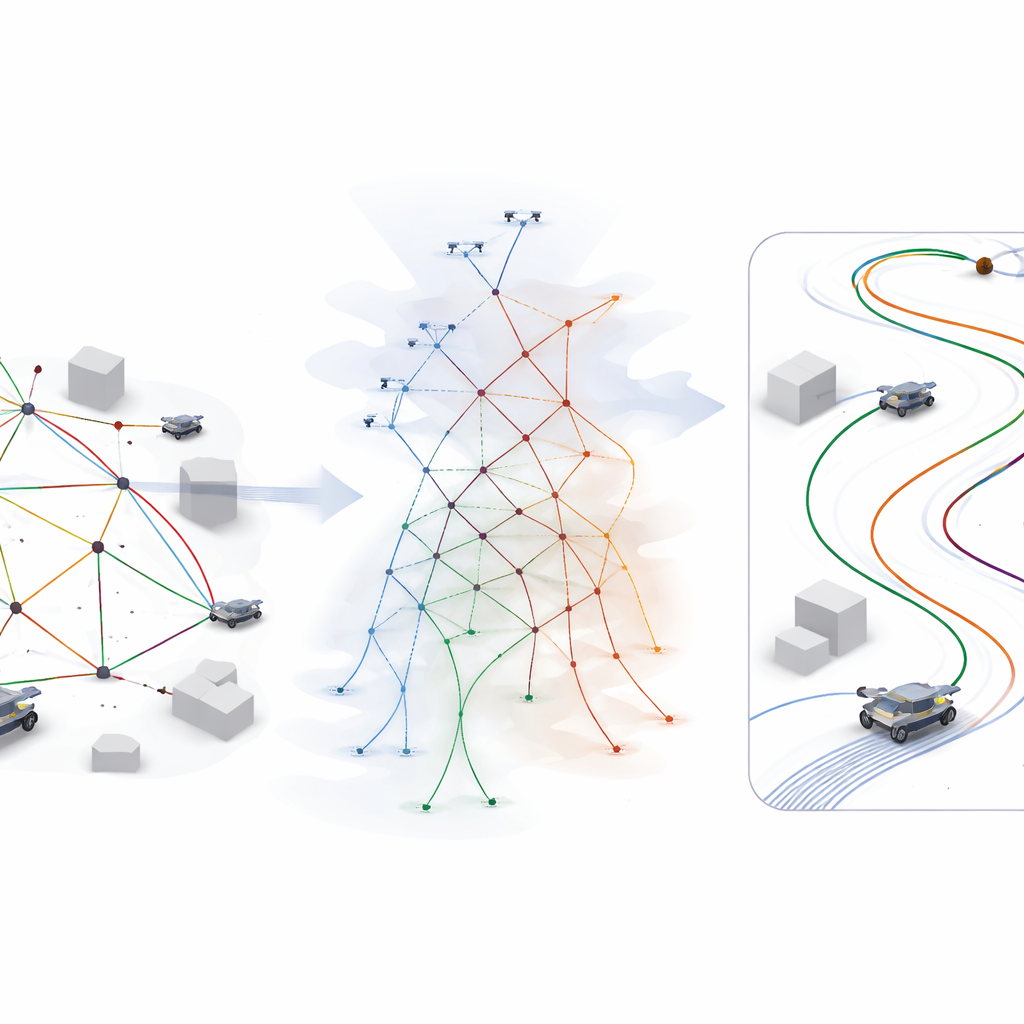
Die Autoren schlagen eine hybride Strategie vor, die sie „konkrete“ Multi-Agenten-Wegplanung nennen. Die Idee ist, die klare Struktur der gitterbasierten Planung mit einem realistischen Bild davon zu verbinden, wie Roboter sich tatsächlich bewegen. Statt rein in einem abstrakten Gitter oder in vollständig kontinuierlicher Physik zu arbeiten, nutzt das System eine geschichtete Beschreibung der Bewegung. Ein zentraler Planer durchsucht eine diskrete Menge möglicher Bewegungen für alle Roboter gleichzeitig, aber jede Bewegung wird um Vorhersagen ergänzt, wie lange sie dauern wird, wie sehr der Roboter von seiner vorgesehenen Linie abweichen könnte und wie nah er anderen sicher begegnen kann. Diese Vorhersagen stammen aus datengetriebenen Modellen, die an realen Roboterexperimenten trainiert wurden, sodass der Planer in der Praxis „weiß“, wie seine Flotte typischerweise reagiert.
Von groben Skizzen zu präziser Bewegung
Sobald der gekoppelte Planer sichere, konfliktfreie Wegpunktfolgen für jeden Roboter erzeugt hat, zoomt das Framework hinein. Ein zweites Modul verwandelt jeden groben Pfad in eine dichte, glatte Trajektorie, die Schub-, Lenkrad- und andere physikalische Beschränkungen respektiert. Um dies schnell zu bewerkstelligen, verwendeten die Autoren zunächst umfangreiche numerische Optimierungen offline, um viele Beispiele annähernd zeitoptimaler Bewegung zu erzeugen, und trainierten dann transformatorbasierte neuronale Netze, diese Beispiele zu imitieren. Zur Laufzeit können diese Netze hochwertige Referenzpfade in weniger als einer Millisekunde erzeugen. Eine dritte Schicht, ein modellprädiktiver Regler mit Sicherheitsfilter, passt laufend die Steuerbefehle an, um diesen Referenzen zu folgen, und nutzt lokale Sensorik, um Überraschungen wie herumirrende Hindernisse oder leichte Nachführfehler auszuweichen.
Vierzig Roboter im Test
Das Team demonstrierte sein System mit einer gemischten Flotte aus 20 Quadrotor‑Drohnen, 8 Bodenrobotern und 12 Robotern, die als bewegliche Hindernisse fungierten, die alle gemeinsam in einer raumgroßen Indoor‑Arena operierten. In einem Versuchsarrangement rasten Schwärme von Drohnen durch beengte Bereiche mit Spitzengeschwindigkeiten über fünf Meter pro Sekunde, während sie sich in einer Art dreidimensionalem Ballett aus dem Weg gingen. In einem anderen Szenario überquerten Bodenroboter wiederholt ein unübersichtliches Gebiet mit zufällig bewegten Hindernissen und schlossen mehr Missionen ab, mit weniger Stopps und ohne Kollisionen, als konkurrierende Methoden erreichten. Die anspruchsvollsten Tests involvierten alle 40 Roboter, die mehrere Missionen nacheinander ausführten, wobei das System bei Bedarf kontinuierlich neu plante, ohne Deadlocks oder Abstürze.
Hinweise auf künftige Liefer- und Lagersysteme
Um zu zeigen, wie sich das in reale Aufgaben übersetzen lässt, inszenierten die Autoren simulierte „Last‑Mile“-Lieferungen und Lagerabläufe. Im Lieferszenario brachten Bodenroboter Drohnen zu einem „Flussufer“, an dem die Drohnen starteten, zu verstreuten Ablagepunkten flogen, zu ihren mobilen Basen zurückkehrten und dann wieder zum Ausgangspunkt gefahren wurden – alles unter Ausweichen beweglicher Hindernisse. Im Lager‑Mockup transportierten Teams von Drohnen wiederholt virtuelle Pakete zwischen Regalen und Lieferräumen und hielten dabei dichte, agile Bewegungen und hohen Durchsatz aufrecht. Diese Fallstudien erforderten nur geringe Anpassungen des Frameworks und unterstreichen seine Fähigkeit, sich an neue Plattformen und Aufgaben anzupassen.
Was das für die Zukunft bedeutet
Kurz gesagt zeigt diese Arbeit, dass große Roboterteams sowohl kühn als auch sicher in engen, sich verändernden Räumen agieren können, indem schnell arbeitende High-Level-Planung, realistische Bewegungsmodelle und Notfall‑Sicherheitsprüfungen sorgfältig kombiniert werden. Der „konkrete“ Ansatz wandelt abstrakte Pläne in Bewegungen um, die reale Maschinen in hoher Geschwindigkeit ausführen können, und bietet gleichzeitig in vielen praktischen Szenarien Garantien gegen Kollisionen und Deadlocks. Auch wenn extrem chaotische Umgebungen und völlig unbekannte Räume weiterhin eine Herausforderung bleiben, weist das Framework in Richtung einer Zukunft, in der Flotten von Lieferdrohnen, Lagerrobotern und anderen Maschinen belebte Umgebungen teilen können, ohne ständige menschliche Aufsicht.
Zitation: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
Schlüsselwörter: Koordination mehrerer Roboter, Wegplanung, Roboterschwärme, Lagerautomatisierung, Drohnenzustellung