Clear Sky Science · de
Insekteninspiriertes adaptives Verhaltenskompensations‑Strategie gegen olfaktorische Sinnesdefizite für die robotische Lokalisierung von Geruchsquellen
Warum der Verlust eines Sensors nicht das Ende der Spur bedeutet
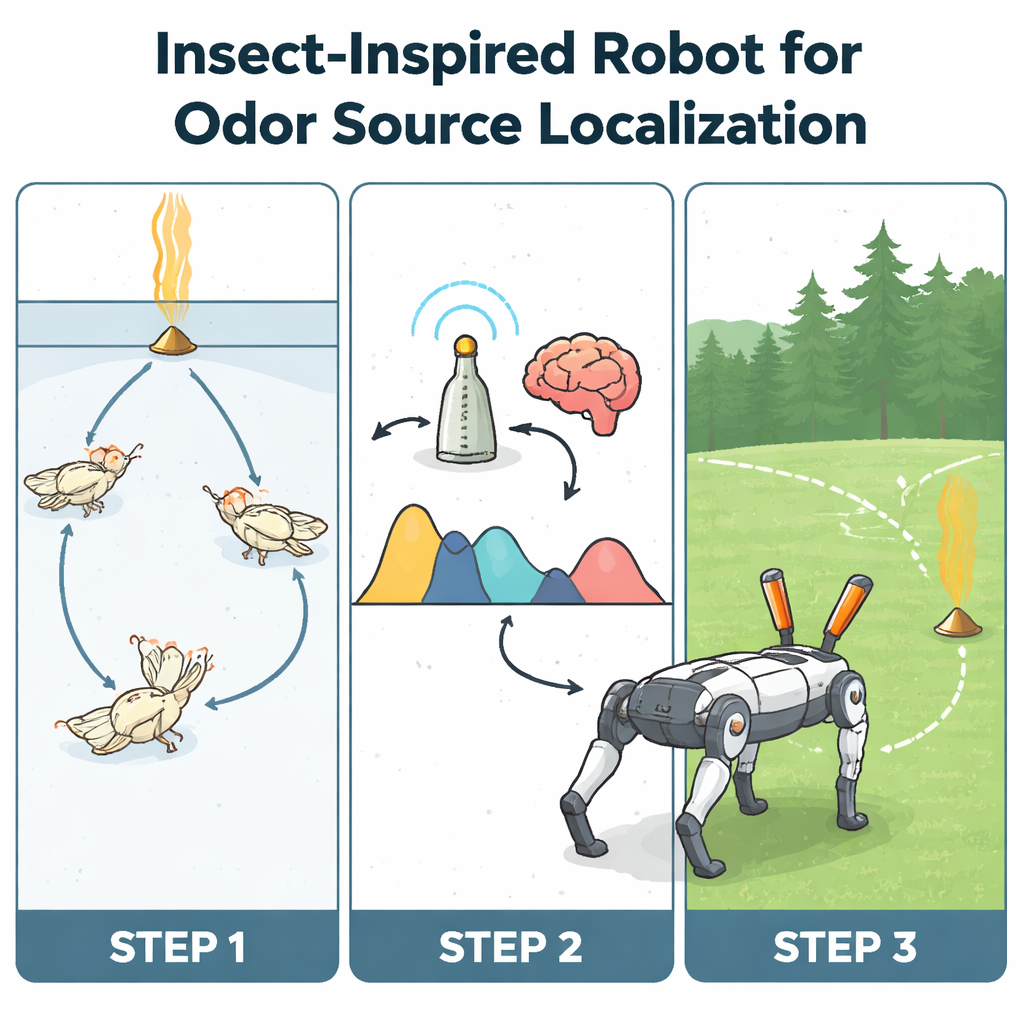
Stellen Sie sich einen Such‑und‑Rettungsroboter vor, der versucht, ein Gasleck oder einen eingeklemmten Überlebenden in einem eingestürzten Gebäude aufzuspüren – und dann fällt einer seiner wichtigsten Sensoren aus. Heutige Roboter versagen unter solchen Schäden oft stark. Diese Studie lässt sich von einem überraschenden Experten der geruchsbasierten Navigation inspirieren, der männlichen Seidenraupe, und zeigt, wie Tiere eine Geruchsquelle weiterverfolgen können, selbst wenn ihnen die Hälfte ihrer „Nase“ fehlt, und wie diese Strategie auf vierbeinige Roboter übertragbar ist.
Ein winziger Navigator mit einem starken Geruchssinn
Viele Tiere – von Insekten bis zu Hunden – nutzen luftgetragene chemische Signale, um Nahrung, Partner oder sicheren Unterschlupf zu finden. Gerüche sind besonders nützlich, wenn die Sicht durch Dunkelheit, Rauch oder Trümmer blockiert ist. Aber reale Geruchsfahnen sind chaotisch: der Wind ändert sich, Gebäude und Bäume lenken den Fluss ab, und der stärkste Geruch liegt nicht immer direkt gegen den Wind in Richtung der Quelle. Die meisten geruchssuchenden Roboter gehen davon aus, dass alle ihre Geruchssensoren perfekt arbeiten und dass Geruchs‑ und Windrichtungen sauber übereinstimmen. In der Natur gilt keine dieser Annahmen. Die Seidenraupe Bombyx mori bildet hier ein natürliches Gegenbeispiel: Männchen können Weibchen aufspüren, die Sexuallockstoffe abgeben, selbst in turbulenter Luft und, faszinierenderweise, sogar wenn eine von zwei Antennen – ihr hauptsächliches Geruchsorgan – entfernt wurde.
Wie Motten den Verlust einer Antenne kompensieren
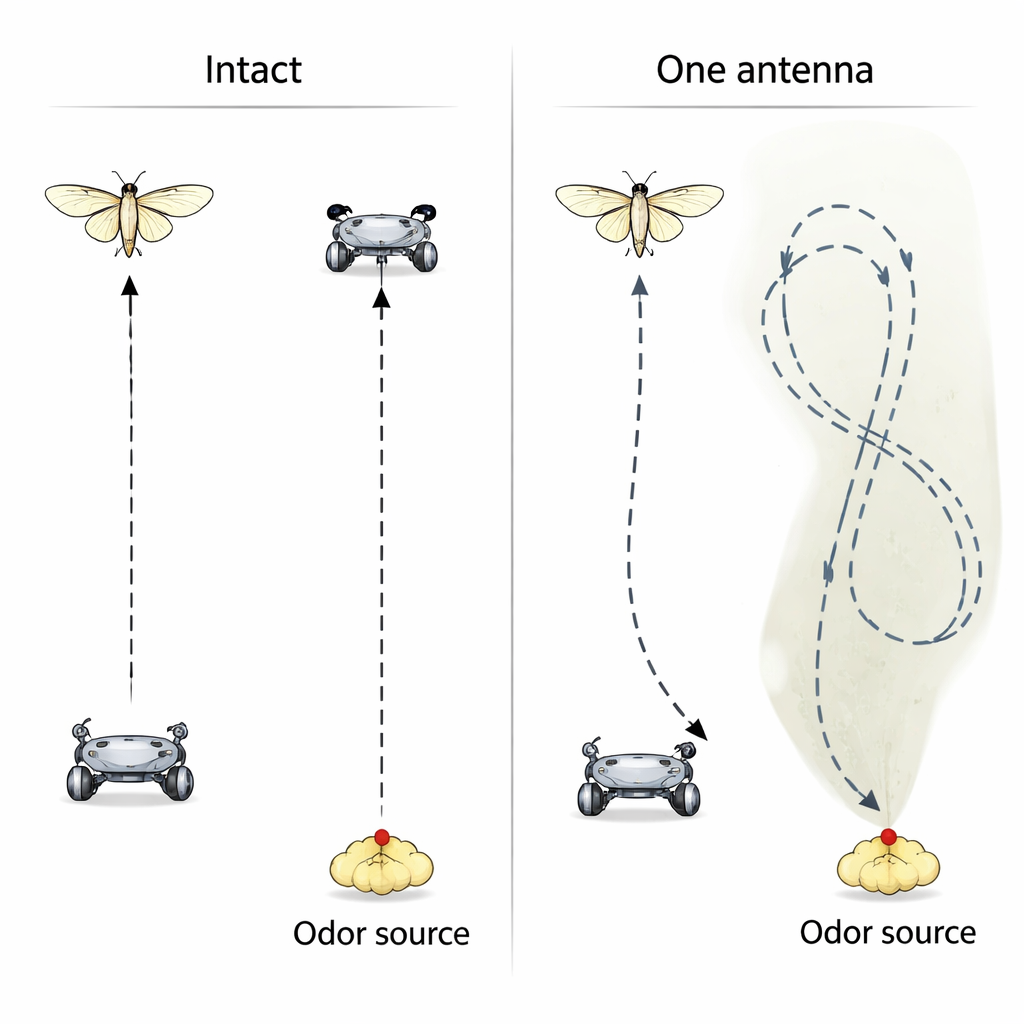
Die Forscher testeten zunächst, wie gut intakte männliche Seidenraupen und Motten mit entfernter linker Antenne in einem Labor zu einer Geruchsquelle laufen können. Beide Gruppen starteten 15 Zentimeter entfernt von einem pheromonabgebenden Punkt. Überraschenderweise sank die Erfolgsrate – das Erreichen der Quelle innerhalb einer Minute – nach Entfernung einer Antenne nicht signifikant. Was sich änderte, war der Pfad: Intakte Motten marschierten tendenziell auf einer recht geraden Route, während einantennige Motten längere, verschlungene Wege nahmen, die zur Seite der verbleibenden Antenne hin gekrümmt waren. Detaillierte Messungen der Kopfbewegungen zeigten, dass die Motten ihre Wendestrategie danach umstellten, an welcher Stelle entlang der verbleibenden Antenne der Geruch registriert wurde – nahe der Basis oder nahe der Spitze – und in welche Richtung sie gerade drehend unterwegs waren.
Zwei einfache Regeln, verborgen im komplexen Verhalten
Indem das Team wiederholt Geruchspulse links und rechts abgab und die Kopfwinkel der Motten verfolgte, wandelten sie das Verhalten in Wahrscheinlichkeitskurven um, die zeigten, wie wahrscheinlich eine Motte nach jedem Duftstoß nach links oder rechts dreht. Wenn ein Geruch nahe der Antennenbasis auftrat, bevorzugte die Motte stark, weiterhin in dieselbe Richtung zu rotieren und setzte somit die aktuelle Drehung fort. Traf der Duft nahe der Spitze ein, wurde die Entscheidung ausgeglichener, mit einer leichten Tendenz, die gegenüberliegende Seite zu erkunden. Vereinfacht gesagt: Der Verlust einer Antenne ließ die Motte nicht aufgeben; er ließ sie ein Suchmuster annehmen, das beide Seiten des Raums breiter abtastet, insbesondere entlang der „Kante" der Geruchsfahne, wo die Geruchsintensität schnell variiert.
Einem vierbeinigen Roboter das Riechen wie bei einer Motte beibringen
Als Nächstes bauten die Forscher einen vierbeinigen Roboter mit geruchssensitiven Geräten am „Kopf“, angeordnet, um die Basis‑bis‑Spitze‑Struktur einer Antenne nachzuahmen. Sie entwickelten zwei Suchalgorithmen. Der erste, ein standardmäßiger motteninspirierter Ansatz namens SZL (für Surge–Zigzag–Loop), geht von zwei funktionierenden Geruchssensoren aus und wählt seine gerade „Surge“-Richtung aus der relativen zeitlichen Abfolge der Links‑ und Rechtsdetektionen. Der zweite, context‑dependent moth‑inspired (CDMI), beinhaltet die neuen mottenbasierten Regeln: Er schätzt ein, wo entlang des verbleibenden Sensors ein Geruch festgestellt wurde, und nutzt die aus den Tierversuchen abgeleiteten Wahrscheinlichkeitskurven, um zu entscheiden, in welche Richtung und wie scharf er sich bewegen soll. In Innenraumtests funktionierte SZL am besten, wenn beide Sensoren intakt waren und führte zu schnellen, relativ geraden Pfaden. Wurde jedoch ein Sensor deaktiviert, übertraf CDMI SZL deutlich und fand die Quelle häufiger, indem es der sich verändernden Kante des Geruchsfeldes in schleifenförmigen Trajektorien folgte, ähnlich denen der einantennigen Motten.
Roboter, die intelligent bleiben, wenn etwas ausfällt
Um die Idee weiter zu prüfen, testete das Team die Roboter im Freien, wo natürlicher Wind und Turbulenzen Geruchsfahnen stark lückenhaft machen. Dem intakten Roboter gaben sie den konventionellen SZL‑Algorithmus und dem „ein‑Sensor“-Roboter den CDMI‑Algorithmus. Beide erreichten vergleichbare Erfolgsraten, doch der beschädigte Roboter mit der motteninspirierten adaptiven Strategie fand die Quelle oft über kürzere, weniger verschlungene Pfade. Das deutet darauf hin, dass es unter rauen, realen Bedingungen tatsächlich besser sein kann, von einem präzisen, aber fragilen Sensorschema zu einer explorativeren, kantenfolgenden Strategie zu wechseln. Die übergeordnete Botschaft lautet, dass robuste Navigation nicht immer komplexere künstliche Intelligenz erfordert. Stattdessen können einfache, biologisch begründete Regeln – verknüpft mit der Anordnung der Sensoren am Körper und der Interaktion des Körpers mit seiner Umgebung – helfen, Roboter zu schaffen, die weiterarbeiten, selbst wenn wichtige Teile ausfallen, eine entscheidende Eigenschaft für langdauernde Erkundungs‑ und Rettungseinsätze.
Zitation: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
Schlüsselwörter: olfaktorische Navigation, bioinspirierte Robotik, Lokalisierung von Geruchsquellen, insekteninspirierte KI, verkörperte Intelligenz