Clear Sky Science · de
Taktil-reaktiver Greifer mit einer aktiven Handfläche für geschickte Manipulation
Roboter, die fühlen können, was sie halten
Stellen Sie sich einen Roboter vor, der behutsam eine reife Erdbeere pflückt, einen kindersicheren Verschluss aufdreht oder eine Glühbirne über Kopf eindreht – und dabei nichts zerdrückt, fallen lässt oder fehl ausrichtet. Dieses Paper beschreibt einen neuen robotischen Greifer, der Maschinen solcher sorgfältigen, menschenähnlichen Handfertigkeit näherbringt, indem er dem Roboter nicht nur intelligente Finger, sondern auch eine aktive, hochempfindliche Handfläche verleiht.
Eine Handfläche, die mehr kann als nur halten
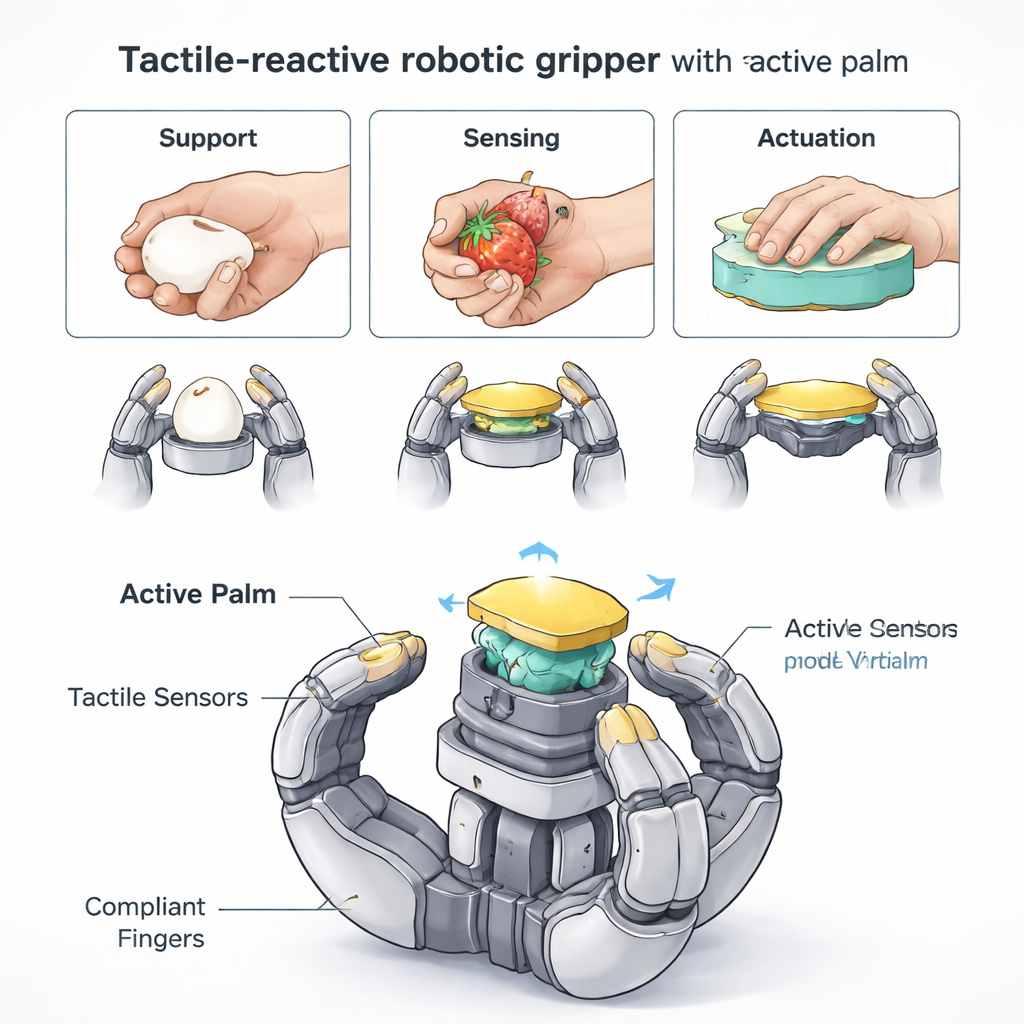
Die meisten Roboterhände haben heute entweder einfache, steife Klauen, die nur greifen können, oder sehr komplexe Mehrfingerhände, die schwer zu bauen und zu steuern sind. Eine zentrale Erkenntnis dieser Arbeit ist, dass menschliche Hände stark auf die Handfläche angewiesen sind – nicht nur auf die Finger – für Unterstützung, Tastsinn und Druckausübung. Die Forscher entwarfen einen dreifingrigen robotischen Greifer mit einer zentralen Handfläche, die sich auf und ab bewegen kann und von einem kamerabasierten Tastsensor bedeckt ist. Jede Fingerspitze besitzt außerdem eine flexible druckempfindliche Fläche. Zusammen ermöglichen diese Komponenten dem Greifer zu fühlen, wo und wie er ein Objekt berührt, und seinen Griff in Echtzeit anzupassen, obwohl das gesamte System nur sieben bewegliche Gelenke verwendet.
Einfache Bewegungen, viele Griffarten
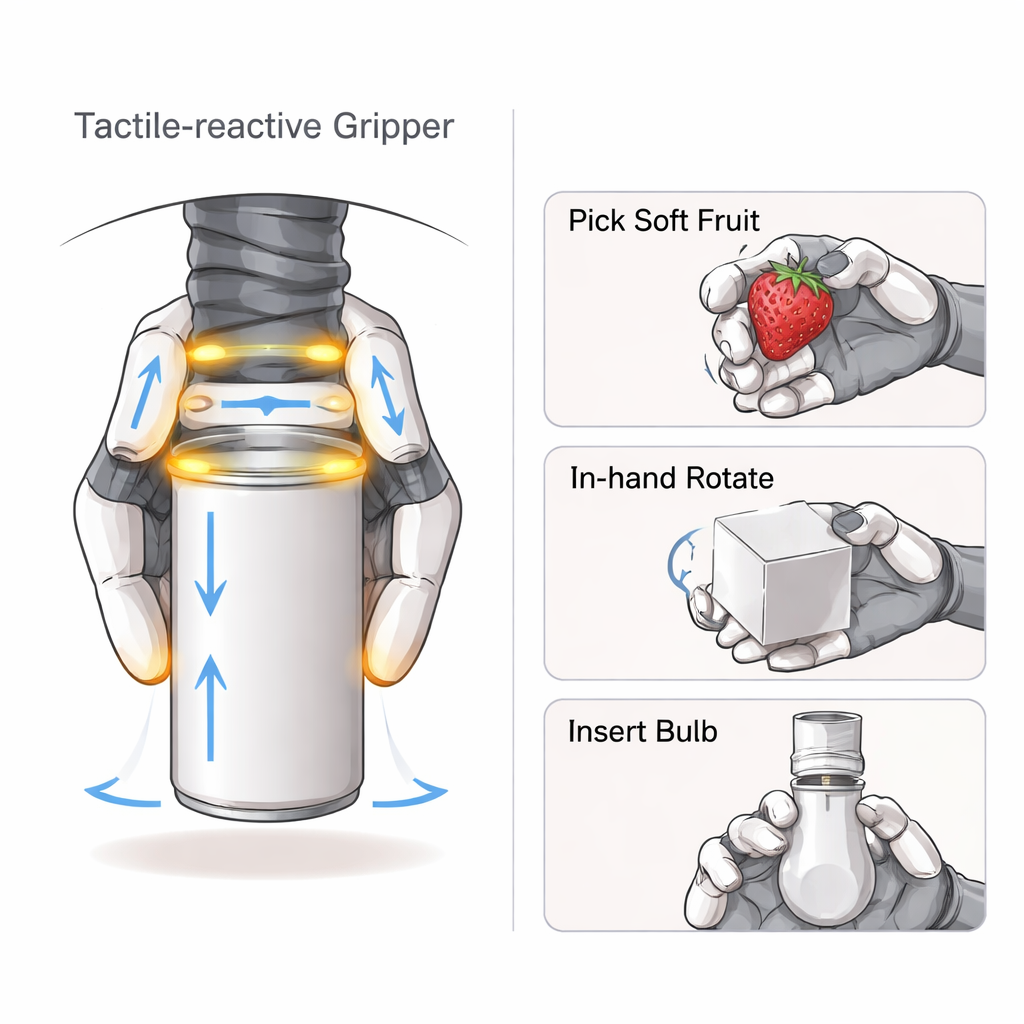
Die drei identischen Finger des Greifers können schwenken und sich biegen, was mehrere alltägliche Griffstile erlaubt: das Einkäfigen großer Gegenstände wie Bälle, das Zupfen dünner Objekte wie Karten und das Klemmen schwerer Werkzeuge in einem Kraftgriff. Die weiche, rückenwirbelartige Fingerstruktur umschließt auf natürliche Weise Objekte unterschiedlicher Form, ohne aufwändige Programmierung. Gleichzeitig gleitet die Handfläche vertikal wie ein Aufzug, sodass sie gegen ein Objekt drücken, die Last mit den Fingern teilen oder die Position des Objekts in der Hand verschieben kann. Simulationen und Experimente zeigen, dass die Hand selbst mit nur zwei Gelenken pro Finger zuzüglich der beweglichen Handfläche Objekte in vielen Richtungen bewegen und unhandliche, schwer zu kontrollierende Lagen vermeiden kann.
Fühlen mit sowohl Fingern als auch Handfläche
Um zu verstehen, was sie hält, kombiniert der Greifer drei Arten der Wahrnehmung: detaillierte Taktbilder von der Handfläche, Druckkarten von den Fingerspitzen und Messwerte der eigenen Gelenkwinkel. Ein maschinelles Lernsystem verschmilzt diese Signale und gewichtet jene Hinweise stärker, die für ein bestimmtes Objekt am hilfreichsten sind. In Tests mit Getränkedosen und Bällen unterschiedlicher Größe und Materialien konnte das System mit nahezu 99 % Genauigkeit erkennen, was es hielt. Dieser reiche Tastsinn leitet auch, wie stark gedrückt werden soll, wann das Schließen der Finger gestoppt wird und wie die Handfläche bewegt werden muss, um den Kontakt stabil zu halten, ohne zu viel Reibung zu erzeugen.
Von Testobjekten zu Früchten und Glühbirnen
Das Team unterzog den Greifer einem weit verbreiteten Greif-Benchmark mit Alltagsgegenständen wie Bällen, Werkzeugen und kleinen Bauteilen. Er erzielte bessere Ergebnisse als mehrere bekannte Forschungsgreifer, obwohl er weniger bewegliche Teile verwendet. Über Testsets hinaus zeigte der Greifer, dass er empfindliche Früchte – Erdbeeren, Trauben, Tomaten und mehr – ohne sichtbare Druckstellen sogar noch Tage später, bestätigt unter UV‑Licht, aufnehmen konnte. Er konnte zudem Blöcke und Zylinder präzise in der Hand verschieben und drehen, eine Glühbirne in eine nach oben gerichtete Fassung einschrauben, einen Kolben einer Spritze drücken, während er das Rohr hält, und kindersichere Verschlüsse durch Drücken und Drehen öffnen. In vielen dieser Aufgaben lieferte die bewegliche Handfläche den zusätzlichen Schub, die Unterstützung oder die Sensitivität, die standardmäßigen rein fingerbasierten Greifern fehlt.
Warum das für zukünftige Roboter wichtig ist
Die Arbeit zeigt, dass Roboter nicht immer mehr und mehr Finger oder Gelenke brauchen, um geschickt zu sein. Durch die sorgfältige Koordination einiger nachgiebiger Finger mit einer aktiv gesteuerten, tastsensitiven Handfläche erreicht dieser Greifer eine Mischung aus Kraft, Zartheit und Wahrnehmung, die einer menschlichen Hand ähnlicher wird. Da die Bauteile überwiegend 3D-gedruckt sind und handelsübliche Sensoren verwenden, ist das Design relativ leicht reproduzierbar. Mit weiterer lernbasierter Steuerung könnten ähnliche Greifer Robotern helfen, Einkäufe zu verpacken, in der häuslichen Pflege zu assistieren oder sicher mit Menschen in Fabriken zu arbeiten – indem sie selbstbewusst spüren, was sie tun, statt nur zu raten.
Zitation: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
Schlüsselwörter: robotischer Greifer, taktiles Fühlen, geschickte Manipulation, Robotikhand, aktive Handfläche