Clear Sky Science · de
Propriozeption in aquatischen weichen Tragflächen nutzen ermöglicht hybride passive-aktive Störungsunterdrückung
Intelligente Tragflächen unter Wasser
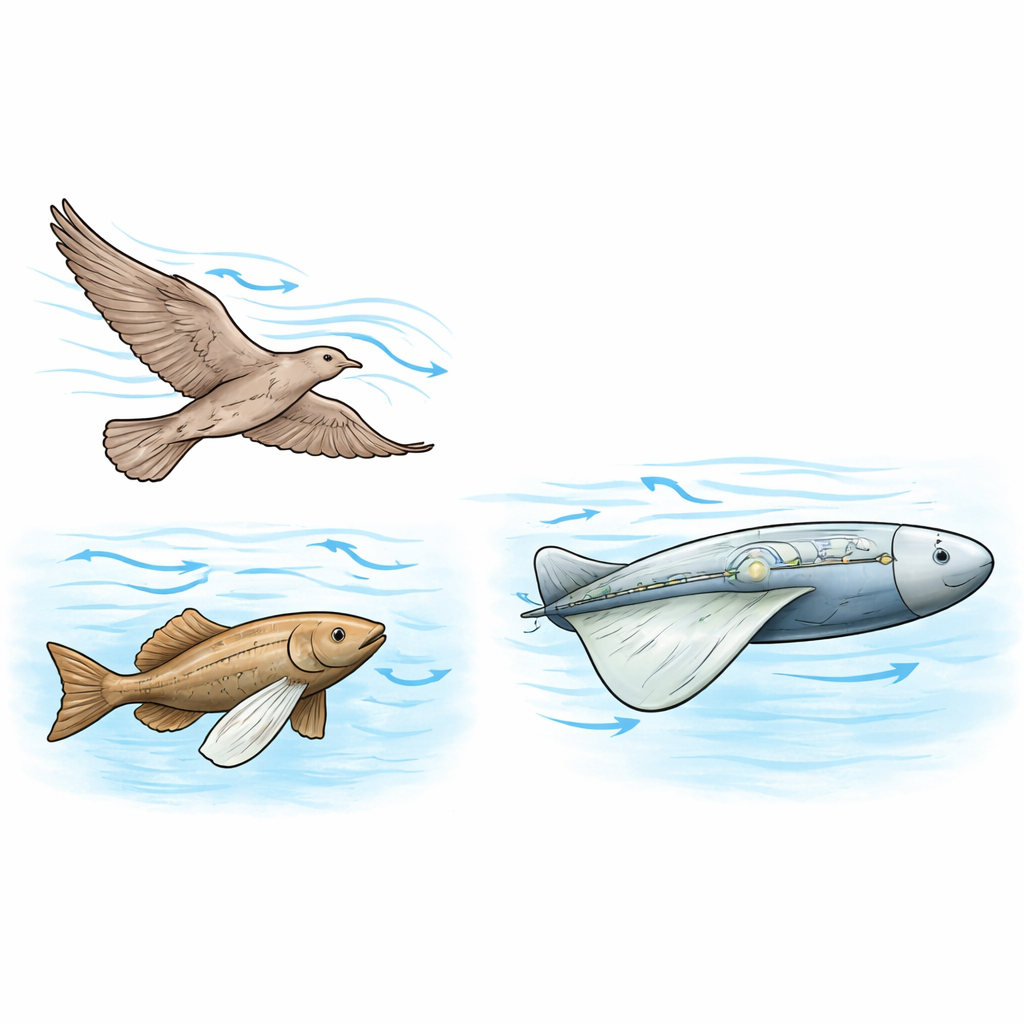
Wer schon einmal einen Vogel gesehen hat, der in böigem Wind schwebt, oder einen Fisch, der in einer schnellen Strömung die Position hält, hat erlebt, wie die Natur ein schwieriges ingenieurtechnisches Problem löst: Wie bleibt man auf Kurs, wenn die umgebende Flüssigkeit sich nicht benehmen will. Diese Studie zeigt, wie eine neue Art weicher Unterwassertragfläche, ausgestattet mit einem „Selbstgefühl“ ähnlich der tierischen Propriozeption, plötzliche Strömungsänderungen automatisch wahrnehmen und sich so verformen kann, dass sie stabil bleibt. Die Arbeit weist auf künftige Unterwasserroboter hin, die eher wie Tiere und weniger wie starre Maschinen gleiten — sie sparen Energie und bewältigen raue Bedingungen besser.
Von Vögeln und Fischen lernen
In der Natur sind Flügel und Flossen keine starren Klingen; sie biegen sich, verdrehen und federn. Vögel nehmen Luftbewegungen über winzige Rezeptoren in ihren Federn wahr, während Fische druckempfindliche Zellen entlang ihres Körpers und in den Flossenstrahlen nutzen. Diese eingebetteten Sensoren ermöglichen es Tieren, zu fühlen, wie sich ihre Anhängsel in bewegtem Wasser oder Luft verformen, und fast augenblicklich zu reagieren, um Böen und Turbulenzen abzufangen. Im Gegensatz dazu verwenden die meisten Unterwasserfahrzeuge starre Steuerflächen und separate Instrumente zur Strömungsmessung, was sie träge und energieintensiv macht, wenn die Umgebung chaotisch wird. Die Autoren argumentieren, dass die Kombination von Flexibilität und Sensorik in einer einzigen weichen Struktur diesen Unterschied verringern könnte.
Eine weiche Tragfläche mit eingebauten Sinnen
Das Team baute eine Halbtragfläche für den Unterwassereinsatz, die einen weichen, biegsamen Schwanz mit einer starren Nase verbindet. Im Inneren des weichen Abschnitts verlaufen befüllbare Schläuche mit Flüssigkeit, die druckbeaufschlagt werden können, um die Krümmung beziehungsweise das Profil der Tragfläche zu ändern. Außen wurde eine dünne elektronische „Haut“ aus Silikon mit flüssigmetallgefüllten Drähten angebracht. Wenn die Tragfläche sich verbiegt, verändert sich der Abstand zwischen diesen eingebetteten Leitern und damit ihre elektrische Kapazität. Durch das Trainieren eines einfachen Machine-Learning-Modells, das diese Signale mit kameraverfolgten Formen abgleicht, verwandelten die Forschenden die E‑Haut in einen hochgenauen Formensor. Einmal trainiert, kann das System die Profilkrümmung der Tragfläche in Echtzeit ohne externe Kameras schätzen, selbst wenn es untergetaucht ist.
Form in Steuerung verwandeln
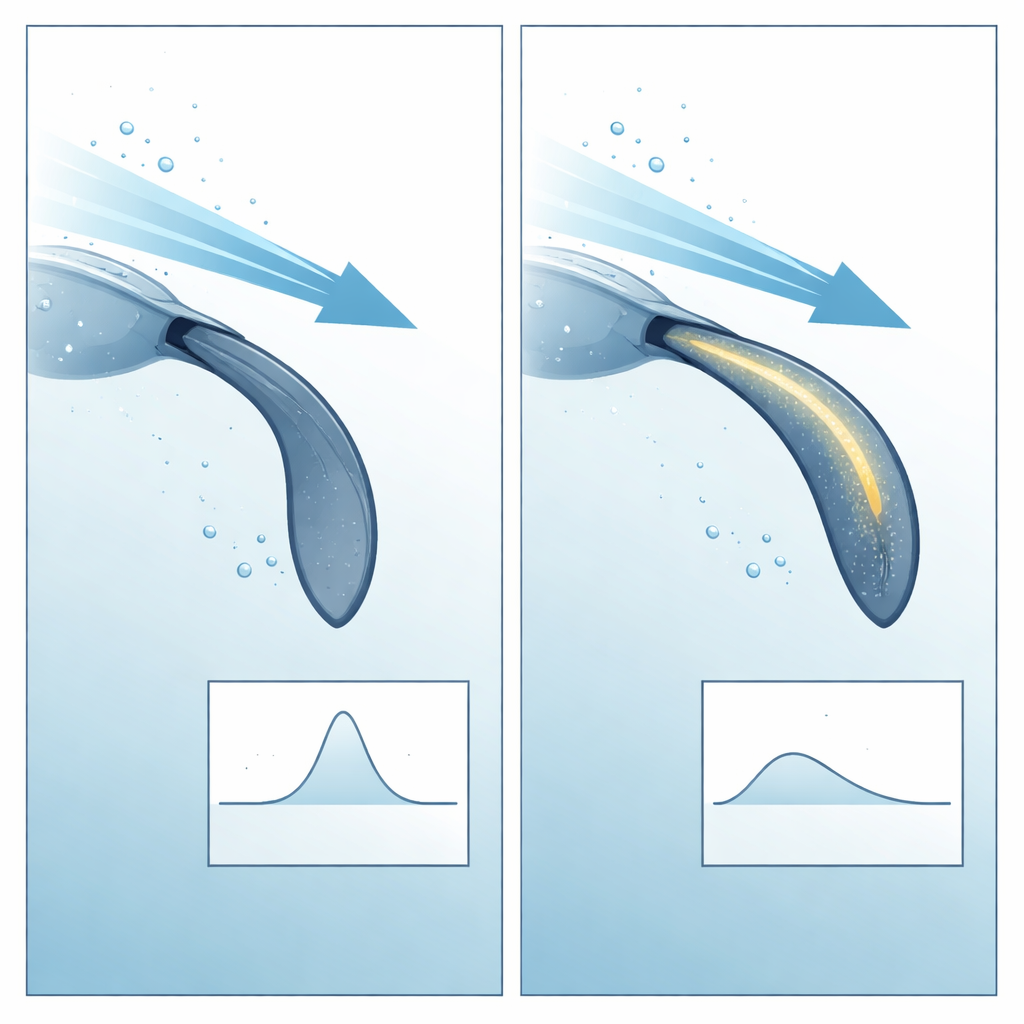
Mit dieser propriozeptiven weichen Tragfläche in einem Wassertunnel ließen die Forschenden Böen als plötzliche Änderungen des Anstellwinkels zur Strömung nachbilden. Zuerst zeigten sie unter stationären Bedingungen, dass sich durch Anpassung der Profilkrümmung bei unterschiedlichen Strömungswinkeln derselbe Auftrieb erzeugen lässt — oder bei gleichem Winkel unterschiedliche Auftriebe. Das bedeutet: Wenn eine Böe die Tragfläche aus dem Gleichgewicht bringt, gibt es im Formraum einen „Pfad“, der den gewünschten Auftrieb wiederherstellen kann. Anschließend programmierten sie eine idealisierte Open-Loop-Reaktion — mit genauem Wissen, wann die Böe auftreten würde — um die internen Schläuche zum richtigen Zeitpunkt auf- oder abzupumpen. In diesem Best‑Case‑Szenario reduzierte das Ändern der Krümmung den Einbruch des Auftriebs während einer Störung von etwa 50 % auf rund 10 %.
Die Tragfläche selbst reagieren lassen
Der anspruchsvollere Test bestand darin, die Tragfläche selbst entscheiden zu lassen, wann etwas nicht stimmt. Hier erkennt die E‑Haut ein charakteristisches „Signaturmuster“ im Krümmungssignal: eine schnelle Überschwingung und anschließende Oszillation, wenn der weiche Körper bei einer plötzlichen Strömungsänderung federt. Wenn dieses Muster auftaucht, pumpt ein einfacher Regler die Schläuche in die Richtung auf, die am wahrscheinlichsten den Auftrieb wieder in Richtung Ziel bringt, ohne die Strömung oder Kräfte explizit zu berechnen. Selbst diese minimalistische Strategie funktioniert gut. Im Vergleich zu einer äquivalenten starren Tragfläche reduziert die unaktivierte weiche Tragfläche allein den Impuls einer Böe — im Wesentlichen die über die Zeit verabreichte Gesamtschubkraft — um etwa den Faktor drei. Bei aktiver Regelung wird der unerwünschte Auftriebsimpuls insgesamt um bis zu 87 % verringert, erreicht damit die in manchen Vogelstudien berichtete Böenbewältigungsfähigkeit und übertrifft sie in Teilen sogar, wenn auch in einem anderen Medium.
Warum das für künftige Roboter wichtig ist
Für die allgemeine Leserschaft lautet die wichtigste Erkenntnis: Weichere und selbstbewusstere Unterwasserroboter können zugleich robuster und effizienter werden. Statt Störungen mit roher Motorenkraft und komplexen externen Sensoren zu bekämpfen, helfen der flexible Körper und die eingebettete Haut des Roboters, die Strömung aufzunehmen und zu lesen; sie lösen moderate Formänderungen aus, die den Kurs halten. Während sich diese Studie auf eine einzelne experimentelle Tragfläche in einem kontrollierten Tank konzentriert, könnten dieselben Prinzipien auf komplette Fahrzeuge oder fischähnliche Schwimmroboter angewendet werden. Langfristig könnte eine solche „verkörperte Intelligenz“ Maschinen erlauben, turbulente Ozeane mit derselben leisen Anmut zu durchqueren, die Vögel und Fische bereits in Luft und Wasser zeigen.
Zitation: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
Schlüsselwörter: weiche Robotik, Unterwasserfahrzeuge, bioinspirierte Gestaltung, Abwehr von Strömungsstörungen, propriozeptive Sensorik