Clear Sky Science · de
Verkörperte taktile Wahrnehmung der Eigenschaften weicher Objekte
Warum es wichtig ist, Robotern das Fühlen beizubringen
Stellen Sie sich einen Roboter vor, der sanft den Bauch eines Patienten abtastet, reife Früchte sortiert, ohne sie zu verletzen, oder zerbrechliche Teile allein durch Tastsinn zusammenbaut. Um all dies sicher zu tun, müssen Roboter lernen, weiche Objekte reichhaltig und menschenähnlich „zu fühlen“. Dieser Artikel beschreibt, wie Forschende eine elektronische Haut und ein neues Lernmodell entwickelten, damit Roboter die Weichheit, Form und Oberflächentextur schwammiger Objekte besser wahrnehmen können – und Maschinen damit einen Schritt näher an wirklich geschickten Tastsinn bringen.
Aufbau eines hochentwickelten Tastsinns
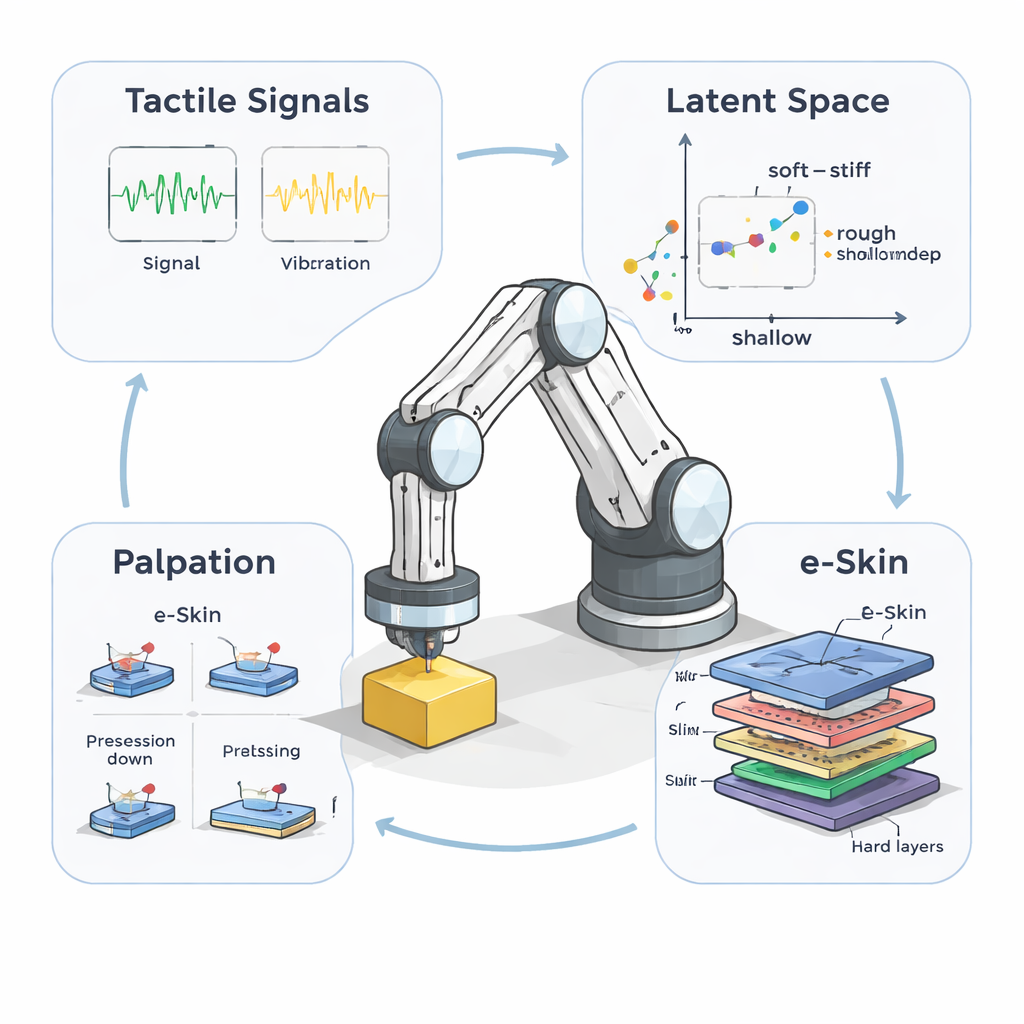
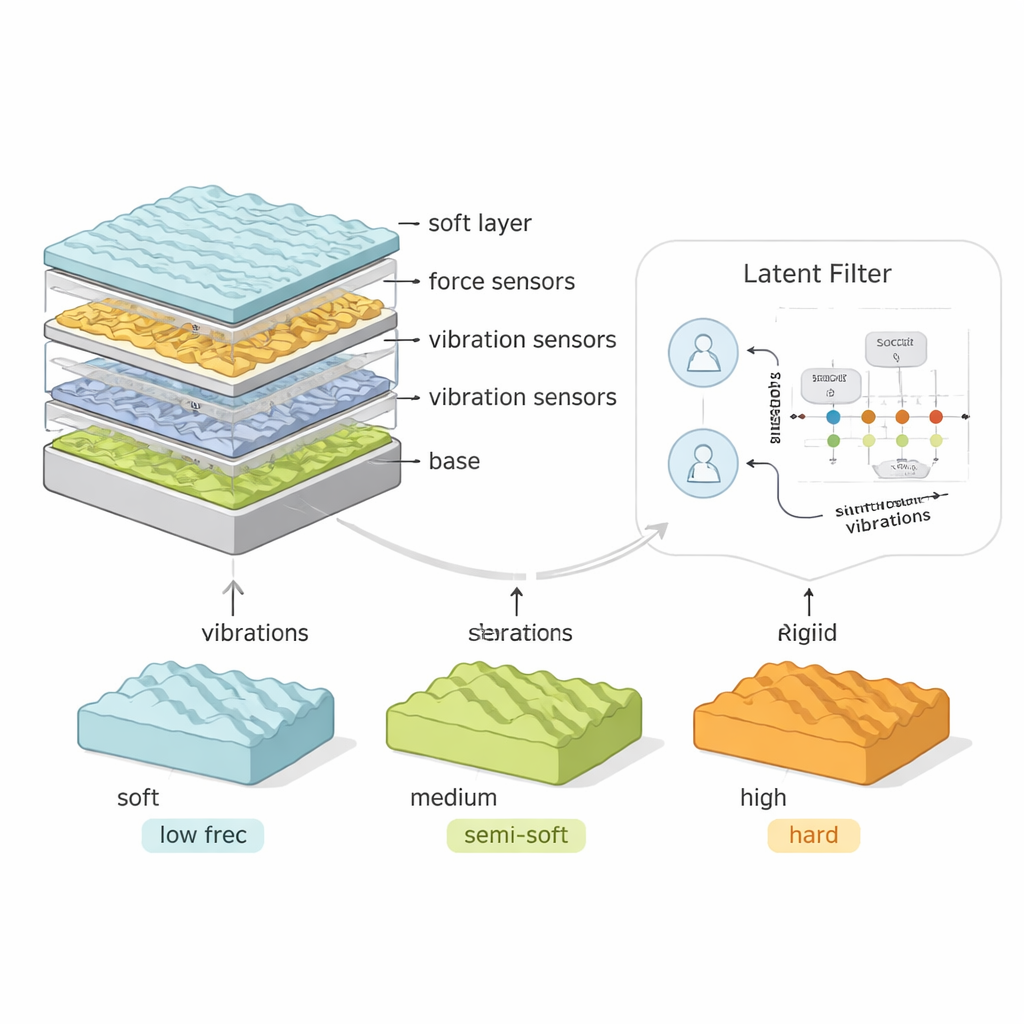
Die menschliche Haut ist weich, geschichtet und mit verschiedenen Mechanorezeptoren ausgestattet, die auf Druck, Dehnung und Vibration reagieren. Das Team machte sich daran, diese Fähigkeiten in einem Roboter nachzuahmen. Sie entwickelten eine modulare elektronische Haut, oder e‑Skin, aus geschichteten Silikonschichten mit eingebetteten Sensoren. Zwei Lagen enthalten dichte Raster von Kraftsensoren, die messen, wie sehr die Haut an verschiedenen Stellen eingedrückt wird, während eine dritte Lage winzige Beschleunigungssensoren enthält, die schnelle Vibrationen erfassen – wie das Summen, das man spürt, wenn man mit dem Finger über rauen Stoff streicht. Durch den Austausch unterschiedlicher Silikontypen konnten sie die e‑Skin selbst weicher oder steifer machen, und durch das Ein‑ oder Ausschalten der Sensorschichten ließen sich verschiedene Kombinationen von „Sinnesorganen“ testen.
Entwurf einer Welt weicher Dinge
Um das Tasten kontrolliert zu untersuchen, brauchten die Forschenden mehr als einfache Gummiblöcke. Sie erstellten eine Bibliothek von „Wellenobjekten“ mit sorgfältig abgestimmten Eigenschaften. Jedes Objekt hatte eine gewellte Oberseite, deren Erhebungen flach oder hoch (Amplitude) und eng beieinander oder weit auseinander (räumliche Frequenz) sein konnten, und jedes wurde aus Materialien gegossen, die von sehr weichem Silikon bis zu hartem Kunststoff reichten. Einige Proben verbargen zudem eine dünne harte Schicht unter einer weichen Oberfläche, um Gewebe oder Materialien zu imitieren, die sich beim tieferen Drücken verändern. Das ermöglichte dem Team, die genaue Weichheit und Textur jedes Objekts zu kennen, das der Roboter berührte, und so das, was der Roboter „fühlte“, mit der Messwahrheit zu vergleichen.
Robotern beibringen, durch Tasten zu erkunden
So wie Menschen stechen, drücken und mit den Fingern gleiten, um ein Objekt zu beurteilen, verwendete der Roboter drei grundlegende Palpationsbewegungen. Beim Pressen bewegte er sich gerade auf und ab, um das Volumenweichmaß zu testen. Bei der Präzession neigte und rollte er die e‑Skin, sodass er mehrere benachbarte Bereiche berührte und komplexere Formen erkundete. Beim Gleiten bewegte er sich seitlich über die Oberfläche, um feine Texturen und Reibung hervorzuheben. Für jedes Objekt führte der Roboter diese Bewegungen mit variierender Eindringtiefe und Geschwindigkeit aus und erzeugte so Tausende zeitlich veränderlicher Tastsignale – Kräfte, die sich über die Haut verteilten, und Vibrationen, die hindurchliefen. Diese reichhaltigen, dynamischen Datenströme sind weitaus informativer als ein einzelner statischer Druck.
Verborgene Muster im Tastsinn entdecken
Um diese Informationsflut zu interpretieren, stellten die Autorinnen und Autoren ein Maschinenlernmodell vor, das sie Latent Filter nennen. Anstatt zu versuchen, Objekte direkt zu etikettieren, lernt das Modell eine interne „Karte“, auf der jeder Punkt die laufende Interaktion des Roboters mit einem Objekt zusammenfasst. Dieser latente Raum ist so strukturiert, dass einige Komponenten schnell auf unmittelbare Tastsignale reagieren, während andere Informationen über die Zeit hinweg langsam integrieren. Durch das Training des Latent Filters an vielen Interaktionen zeigte das Team, dass sich diese interne Karte natürlich an sinnvolle physikalische Merkmale wie Oberflächenrauheit, Beulerhöhe und Steifigkeit anordnet – obwohl das Modell nie explizit diese Labels erhalten hatte. Ein separater Regressionsschritt bestätigte, dass diese verborgenen Merkmale die tatsächlichen mechanischen Eigenschaften eines Objekts mit guter Genauigkeit vorhersagen konnten.
Wie Haut, Sinne und Bewegung zusammenwirken
Die Experimente zeigten, dass keine einzelne Sensorschicht oder Bewegungsstrategie für alle Situationen optimal ist. Die Kombination von Vibrationen- und Kraftinformationen durch einen „Late‑Fusion“-Ansatz – bei dem jeder Signalsatz separat verarbeitet und erst später zusammengeführt wird – lieferte das verlässlichste Verständnis weicher Objekte. Zwei Kraftlagen halfen dem System, Scherung und Dehnung zu spüren, was entscheidend ist, um Steifigkeit und verborgene interne Strukturen zu erkennen, während Vibrationen beim Gleiten besonders nützlich waren, um feine Texturen zu erfassen. Auch die mechanische Weichheit der e‑Skin selbst spielte eine Rolle: steifere Häute waren besser geeignet, Gesamtsteifigkeit und Form zu messen, während weichere Häute subtile Variationen in nachgiebigen oder geschichteten Materialien besser erfassten. Die Ergebnisse legen nahe, dass robotischer Tastsinn gemeinsam gestaltet werden sollte: Die Eigenschaften der Haut, die Sensorelektronik und die Art, wie sich der Roboter bewegt, müssen zusammen abgestimmt werden.
Was das für Alltagsroboter bedeutet
Durch die Verbindung einer geschichteten, vom Menschen inspirierten e‑Skin mit einem leistungsfähigen Lernmodell, das die Rolle der Aktion berücksichtigt, zeigt diese Arbeit, wie Roboter einen tieferen Tastsinn aufbauen können. Anstatt sich nur auf Kameras oder einfache Kraftschwellen zu verlassen, könnten zukünftige Maschinen spüren, wie ein Objekt nachgibt, vibriert und sich verändert, während sie es erkunden, und dann ihren Griff oder ihre Bewegung in Echtzeit anpassen. Solche Fähigkeiten sind entscheidend für Anwendungen wie medizinische Palpation, den Umgang mit weichen Lebensmitteln und das Manipulieren verformbarer Gegenstände in Haushalten und Fabriken. Kurz gesagt: Die Studie demonstriert, dass Roboter, um die Welt so effektiv zu ertasten wie wir, nicht nur gute Sensoren benötigen, sondern auch den richtigen „Körper“, die passenden Bewegungsgewohnheiten – und eine intelligente Methode, all diese Informationen zu einem kohärenten Verständnis dessen zu verweben, was sie fühlen.
Zitation: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
Schlüsselwörter: robotische Berührung, elektronische Haut, Erkennung weicher Objekte, taktile Wahrnehmung, verkörperte Robotik